#Pythonで学ぶ制御工学< 制御モデルの例 >
はじめに
基本的な制御工学をPythonで実装し,復習も兼ねて制御工学への理解をより深めることが目的である.
その第2弾として制御モデルの例を扱う.
システム
システムには大きく分けて2つある.
動的システム
過去の状態に影響を受けるようなシステム
静的システム
過去の状態に依存しないようなシステム
制御対象は多くの場合,動的システムであり,ここで扱うのも動的システムである.
制御モデル
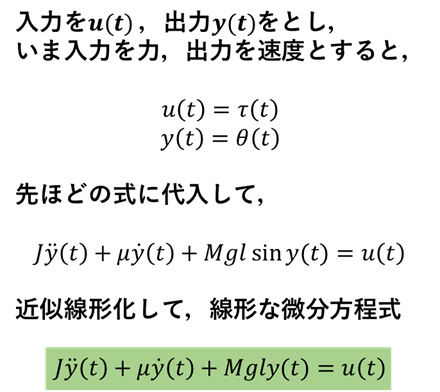
制御を考えるためには,制御モデルを構築できなければならない.以下では,4つの例を示して,制御モデルとはどのようにして求められるのかということへの理解を深める.なお,図において,緑の背景で示したものが制御モデルである.
制御モデル①:台車のモデル
次に台車と条件を示した図を示す.
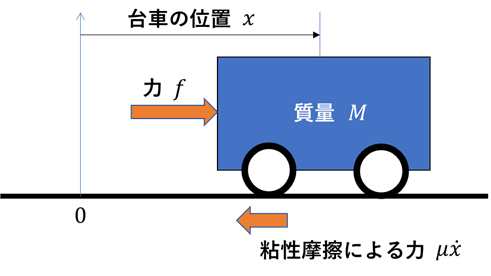
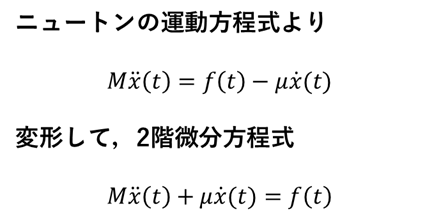
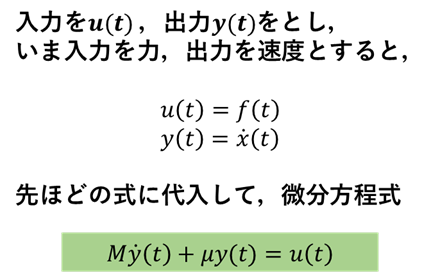
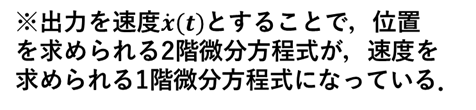
以下にモデルの導出過程を示す.
制御モデル②:垂直駆動アームのモデル
次に垂直駆動アームと条件を示した図を示す.
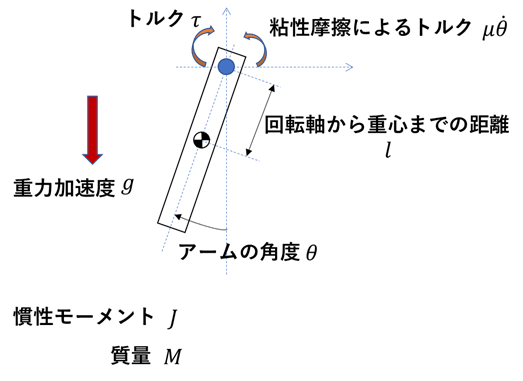
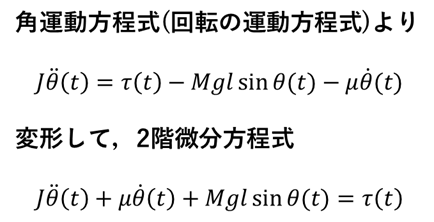
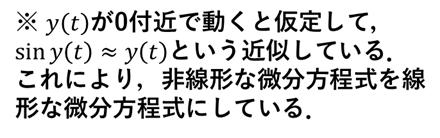
以下にモデルの導出過程を示す.
制御モデル③:RLC回路のモデル
次にRLC回路と条件を示した図を示す.
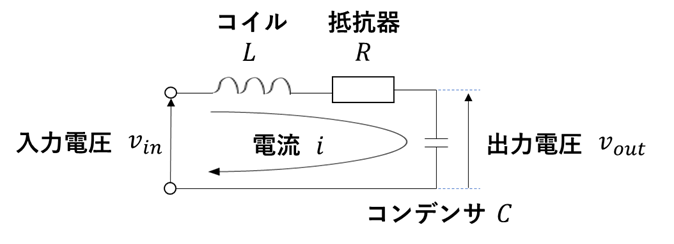
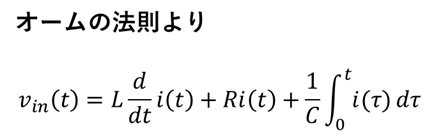
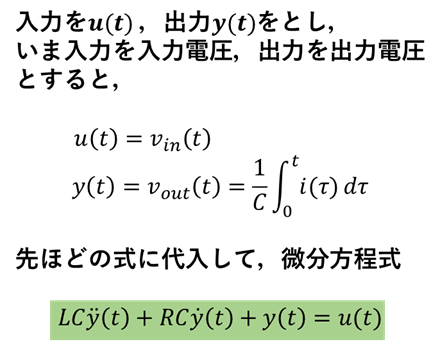
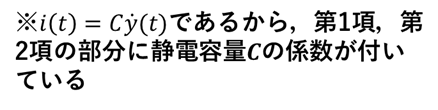
以下にモデルの導出過程を示す.
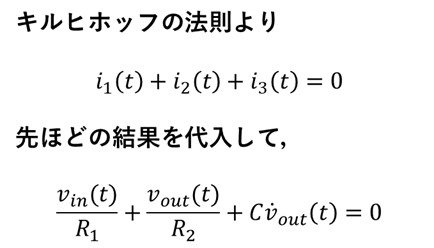
制御モデル④:増幅回路のモデル
次に増幅回路と条件を示した図を示す.
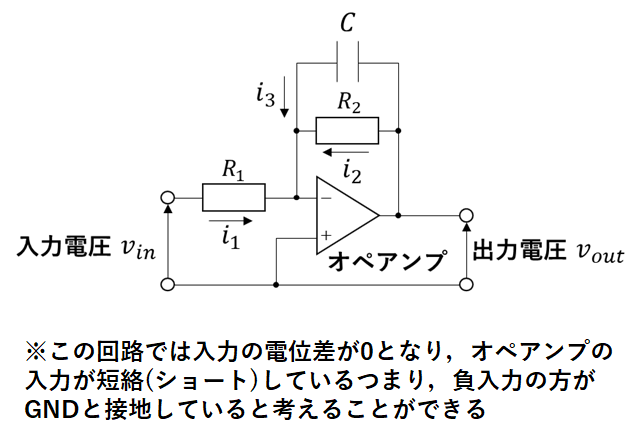
以下にモデルの導出過程を示す.


感想
久しぶりに制御モデルを求める手順をおさらいできた.次回からはようやく,これらの制御モデルに対して伝達関数などを扱うことができる.これについても学んできてはいるが,今回同様,良い復習になり,また新たな鬼月が得られるかもしれない.楽しみである.
参考文献
Pyhtonによる制御工学入門 南 祐樹 著 オーム社