この記事はMATLAB/SIMULINK Advent Calendar 2024の13日目の記事です!
13日の金曜日![]()
![]()
![]()
間違ってるところがあれば教えてください。。。
最適化
最適化とは、ある制約の下で目的関数を最小(最大)化することです。
1目的の最大化問題はこんなやつ

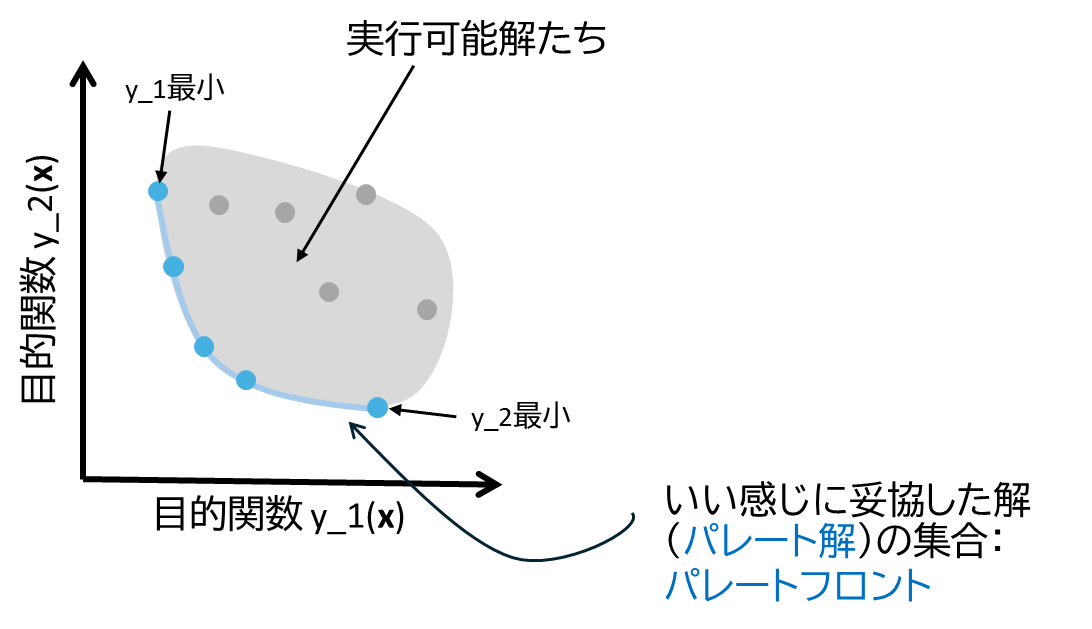
2目的の最小化問題はこんなやつですね。
進化計算
遺伝的アルゴリズムとは
2目的の最小化問題を考えます。
最初は、変数$\boldsymbol{x}$を適当な値で何パターンか計算してみます。
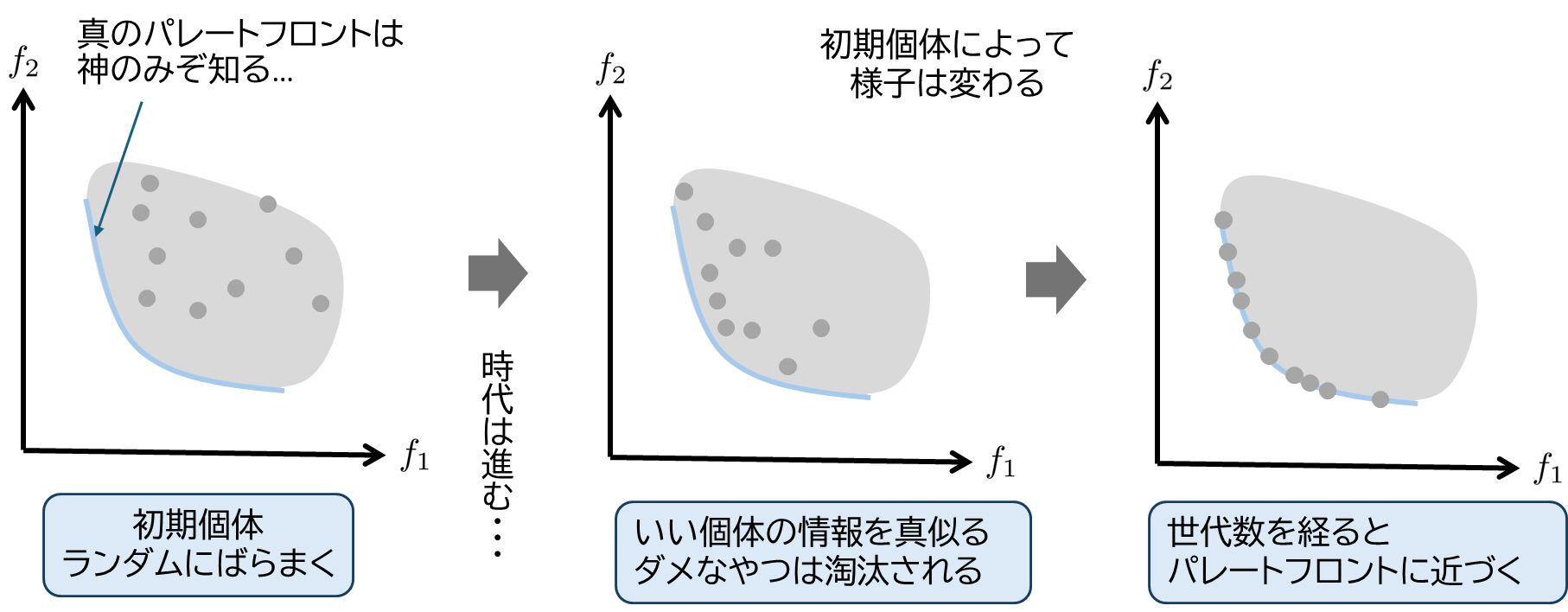
この初期個体たちは目的関数空間に散らばっていますが、最小化問題であれば左下にいる個体の方が偉く、右上にいる個体は成績の悪いダメなやつらということになります。
そして次の世代では、成績の良い個体が生き残り子孫を残し(特徴を受け継ぐ)、ダメなやつらは淘汰されます。
これを繰り返すことによって、だんだんと成績が良くなっていき、最適解へと近づいていきます。
局所解に陥らないように突然変異させたりというのもありますが、詳しくはググってください()
PlatEMOとは
概要
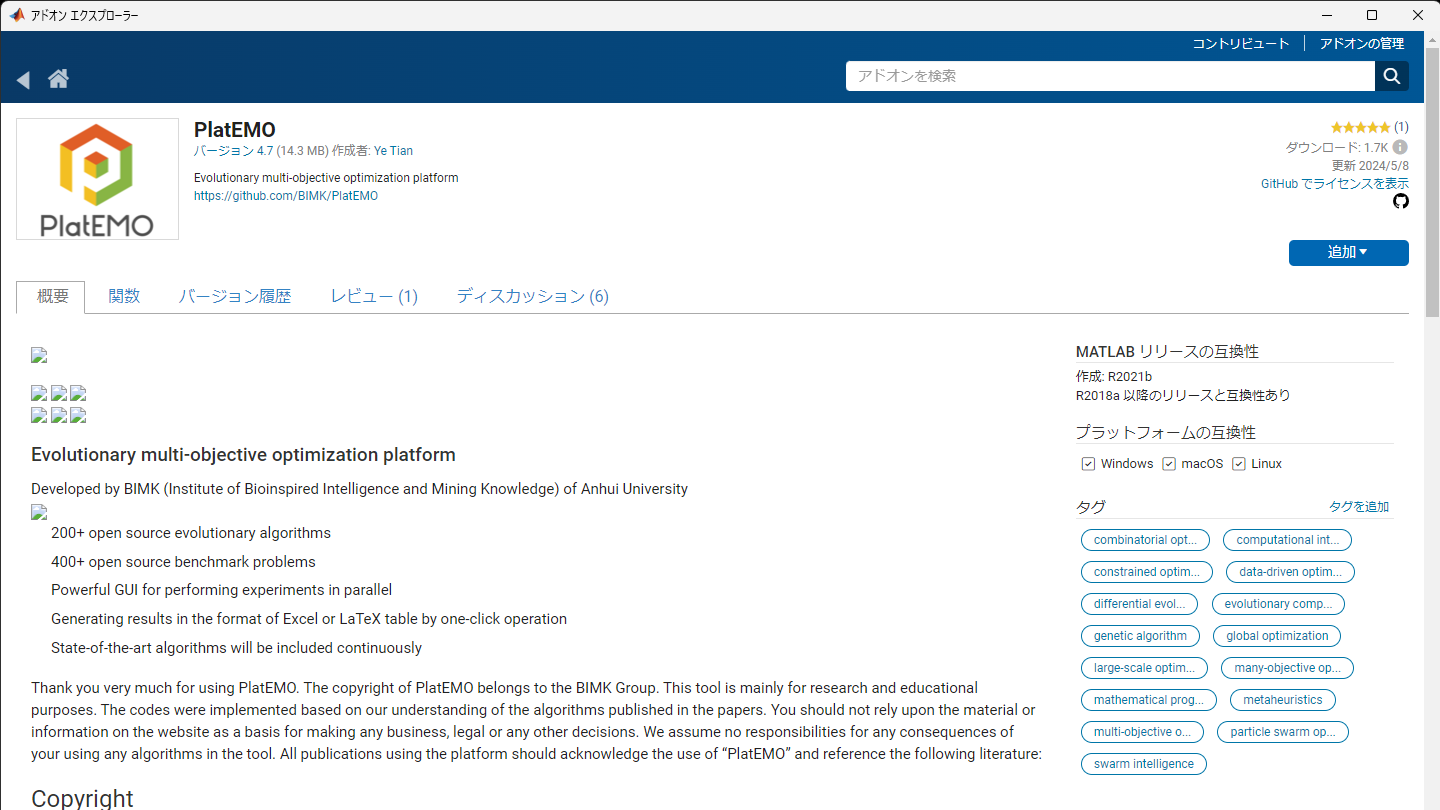
PlatEMOは安徽大学のBIMK (Institute of Bioinspired Intelligence and Mining Knowledge) グループによって開発された、MATLABベースの進化的多目的最適化プラットフォームです。200以上の進化アルゴリズムと400以上のベンチマーク問題を提供する、オープンソースの研究・教育用プラットフォームとなっています。
主な特徴
- 豊富なアルゴリズム:遺伝的アルゴリズム、差分進化、粒子群最適化など
- 充実したベンチマーク問題
- 使いやすいGUIインターフェース
- 並列実験機能
- Excel/テーブル形式での結果出力
技術要件
- MATLABのみで動作(追加のライブラリ不要)
- クロスプラットフォーム対応
- MATLABが動作する環境であれば利用可能
利用上の注意点
ライセンスと引用
研究目的での利用は無料ですが、論文などでPlatEMOを使用した場合は以下の論文を引用する必要があります:
Ye Tian, Ran Cheng, Xingyi Zhang, and Yaochu Jin, PlatEMO: A MATLAB Platform for Evolutionary Multi-Objective Optimization [Educational Forum], IEEE Computational Intelligence Magazine, 2017, 12(4): 73-87
最新バージョン(v4.8)の特徴
- ブロック接続による新アルゴリズムの視覚的作成
- 複数ソリューションの同時評価機能
- 新しい多目的進化アルゴリズム(MOBCA, NRV-MOEA, NSBiDiCoなど)の追加
PlatEMOは継続的に更新されており、最新のアルゴリズムや機能が定期的に追加されています。GitHubのリポジトリをチェックすることで、最新の更新情報を確認できます。
MATLABのFile Exchangeにも上がっているので、アドオンエクスプローラーからも追加できます。
GUIを見てみる
PlatEMOはCUIでも実行できますが、ここではGUIでいろいろ見てみます。
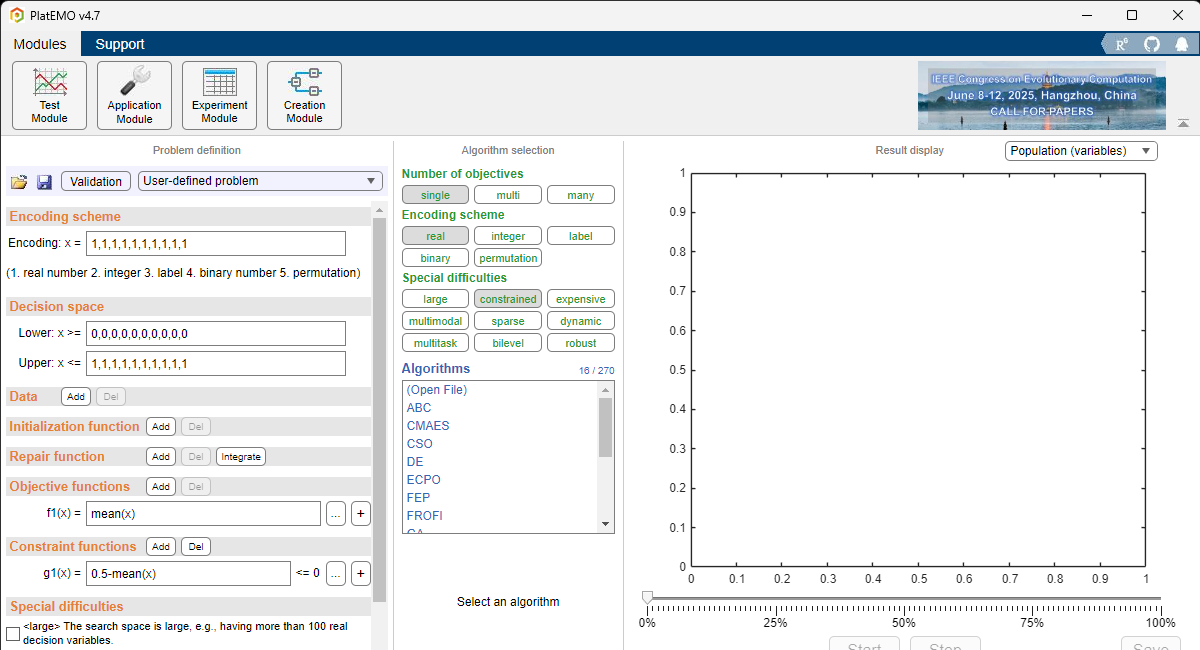
この画面では、自身で最適化問題を定義し、実行できます。
ベンチマーク問題を遊んでみる
PlatEMOにはさまざまなベンチマーク問題があります。試しにやってみます。
ベンチマーク問題は、右上のTest Moduleからいろいろ選択できます。
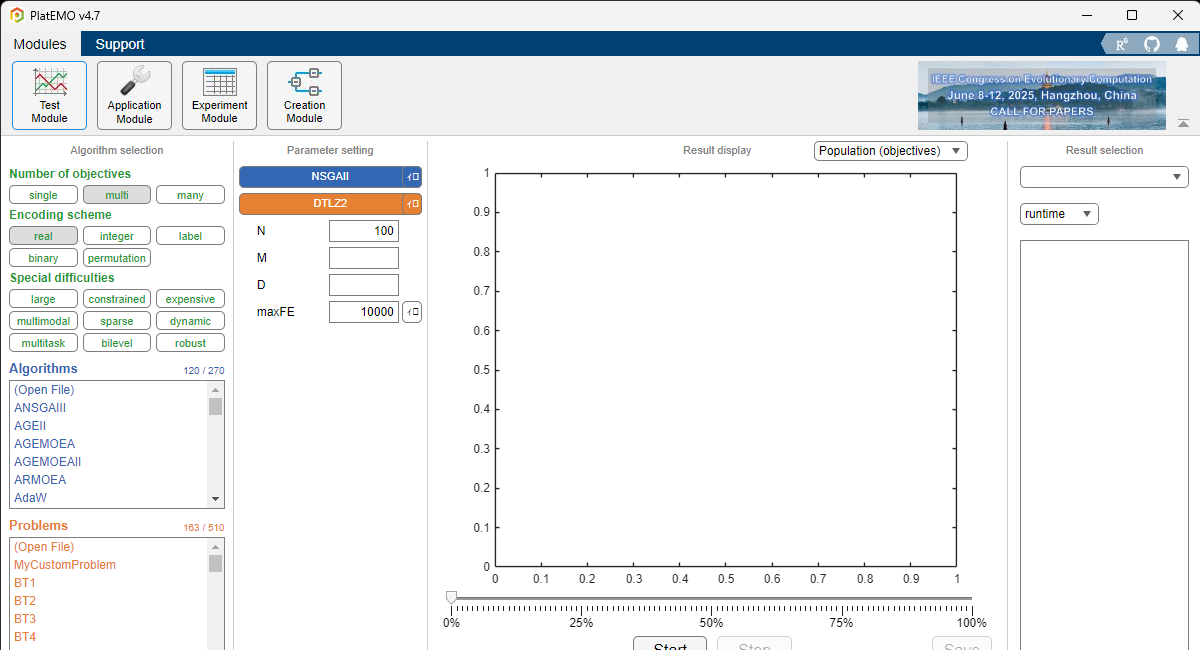
左からアルゴリズムとベンチマーク問題を選択し、目的関数と設計変数の数を決めて実行してみます。
2目的の最小化

3目的の最小化

たまに突然変異により離れたところにプロットされる個体がいて、そのせいでパレートフロントが伸び縮みしているように見えちゃいますね。
自分で最適化問題を定義して試してみる
エネルギー法による倒立振子の振り上げ
ということで、ここでは
- 制御則の切り替え角度
- LQR(最適レギュレータ)による安定化制御の重み
- エネルギー法による振り上げのゲイン
これらのパラメータを最適化によって求められないか考えてみます。
こちらの川田先生の記事を参考に台車型(というより、レール型?)の倒立振子の振り上げとそのアニメーションをやってみます。安定化制御と振り上げ制御、無制御の部分の切り替えだったりがうまくいかないと、いい感じに立ってくれません。
エネルギー法で振り子の振り上げしようとしてるけど、立ちそうで立たない
— ゆうきち@MATLAB Amb (@Yuki_MATLAB_Amb) July 4, 2024
どこいくねんって感じ() pic.twitter.com/3JKONXJMNG
設計変数の定義
設計変数として、以下のパラメータを最適化対象とします。
-
LQRの重み
- $q_1$: $x$(台車の位置)に対応する重み
- $q_2$: $\theta$(振り子の角度)に対応する重み
- $q_3$: $\dot{x}$(台車の速度)に対応する重み
- $q_4$: $\dot{\theta}$(振り子の角速度)に対応する重み
-
振り上げ制御のゲイン
- $k_e$: エネルギー法で振り上げを行う際のゲイン
-
制御則の切り替え角度
- $\theta_{stable}$: 安定化制御と無制御の切り替え角度
- $\theta_{swing}$: 無制御と振り上げ制御の切り替え角度
これら7つのパラメータを設計変数として扱い、それぞれの範囲を以下のように定義します:
| パラメータ | 下限 | 上限 |
|---|---|---|
| $q_1$ | 1 | $10^5$ |
| $q_2$ | 1 | $10^5$ |
| $q_3$ | 1 | $10^5$ |
| $q_4$ | 1 | $10^5$ |
| $k_e$ | 0 | $10^5$ |
| $\theta_{stable}$ | 0 | 180° |
| $\theta_{swing}$ | 0 | 180° |
目的関数の定義
次に、目的関数を定義します。最適化では、多目的最小化問題として以下を設定します:
-
目的関数1: 台車の位置 $x$ の2乗和
台車の移動距離が小さいほど評価が高くなります。
$$
f_1 = \sum_{t}^{t_{end}} x(t)^2
$$ -
目的関数2: 振り子の角度 $\theta$ の2乗和
振り子が垂直に安定するほど評価が高くなります。
$$
f_2 = \sum_{t}^{t_{end}} \theta(t)^2
$$
コードたち
ODE45でシミュレーションを行うために、事前に運動方程式などなどは求めておき、loadで呼び出しています。ここでは2つの目的関数両方でODE45を実行しているので無駄が多いです。一回で済ませるにはグローバル変数とかキャッシュとか使うんですかね?
function [cost] = costFunction(variables)
q1 = variables(1);
q2 = variables(2);
q3 = variables(3);
q4 = variables(4);
k_e = variables(5);
theta_stable = variables(6);
theta_swing = variables(7);
load('workspaceData.mat','A','B','StateEqu','params','x0');
% 状態重み行列と入力重み
Q = diag([q1, q2, q3, q4]);
R = 1;
% LQRゲイン計算
K = lqr(A, B, Q, R);
% シミュレーション設定
tf = 10;
tspan = 0:0.01:tf;
% ode45を用いて非線形システムシミュレーション
[t, x] = ode45(@(t,x) pendulum_cart_nonlinear(t, x, K, StateEqu, params, k_e, theta_stable, theta_swing), tspan, x0);
% コスト計算 xの2乗和
cost = sumsqr(x(:,1));
end
function [cost] = costFunction2(variables)
q1 = variables(1);
q2 = variables(2);
q3 = variables(3);
q4 = variables(4);
k_e = variables(5);
theta_stable = variables(6);
theta_swing = variables(7);
load('workspaceData.mat','A','B','StateEqu','params','x0');
% 状態重み行列と入力重み
Q = diag([q1, q2, q3, q4]);
R = 1;
% LQRゲイン計算
K = lqr(A, B, Q, R);
% シミュレーション設定
tf = 10;
tspan = 0:0.01:tf;
% ode45を用いて非線形システムシミュレーション
[t, x] = ode45(@(t,x) pendulum_cart_nonlinear(t, x, K, StateEqu, params, k_e, theta_stable, theta_swing), tspan, x0);
% コスト計算 thetaの2乗和
cost = sumsqr(x(:,2));
end
制約条件
制約条件として、入力する力の大きさに上限を設定します。
初期個体
自分でもいろいろとパラメータを調整していたところ、なんとか振り上げできるパラメータを発見したので初期個体の一つにこれを与えてみます。

function PopDec = myInitialization(N)
goodSolution = [1,10,1,1000,10,30,135];
D = 7;
PopDec = zeros(N,D);
% 最初の1個体に良好解を割り当て
PopDec(1,:) = goodSolution;
% 残りのN-1個はランダムに生成する
Lower = [1,1,1,1,0,0,0];
Upper = [1e5,1e5,1e5,1e5,1e5,180,180];
PopDec(2:end,:) = rand(N-1,D).*(Upper - Lower) + Lower;
end
シミュレーションと最適化の実行
NSGA-IIという多目的最適化用のアルゴリズムを選択し、最適化を実行してみます。
結果
100個体*100世代の10000回の評価で、最終世代ではこのような結果になりました。
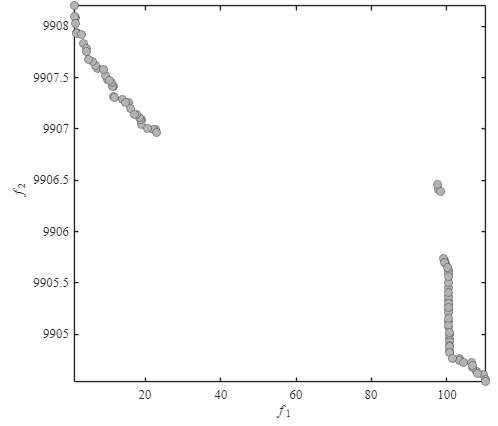
f2の値は全体でみるとほとんど変わっておらず、f1の値の方が個体ごとに大きく違うように見えます。f1の小さい個体の動画を見てみると、いい感じに最適化されてるなーという感じです。

まとめ
急いで書いたのでコードの詳細など掘り切れていません。。。CUIで使用する場合、使い方がplatemo.mの中にも書いてあるのでそちらを参照してみてください!!!
platemo.m
function varargout = platemo(varargin)
%platemo - The main function of PlatEMO.
%
% platemo() displays the GUI of PlatEMO.
%
% platemo('Name',Value,'Name',Value,...) runs an algorithm on a problem
% with specified parameter settings.
%
% All the acceptable names and values are:
% 'algorithm' <function handle> an algorithm
% 'problem' <function handle> a problem
% 'N' <positive integer> population size
% 'M' <positive integer> number of objectives
% 'D' <positive integer> number of variables
% 'maxFE' <positive integer> maximum number of function evaluations
% 'maxRuntime' <positive integer> maximum runtime (in second)
% 'save' <integer> number of saved populations
% 'run' <integer> current run number
% 'metName' <string> names of metrics to calculate
% 'outputFcn' <function handle> function called after each iteration
% 'encoding' <string> encoding scheme of each decision variable (1.real 2.integer 3.label 4.binary 5.permutation)
% 'lower' <vector> lower bound of each decision variable
% 'upper' <vector> upper bound of each decision variable
% 'initFcn' <function handle> function for initializing solutions
% 'evalFcn' <function handle> function for evaluating solutions
% 'decFcn' <function handle> function for repairing invalid solutions
% 'objFcn' <function handle> objective functions
% 'conFcn' <function handle> constraint functions
% 'objGradFcn' <function handle> function for calculating the gradients of objectives
% 'conGradFcn' <function handle> function for calculating the gradients of constraints
%
% Example:
%
% platemo()
%
% displays the GUI of PlatEMO.
%
% platemo('algorithm',@GA,'problem',@SOP_F1,'N',50,'maxFE',20000)
%
% runs GA with a population size of 50 on SOP_F1 for 20000 evaluations.
%
% platemo('algorithm',@PSO,'problem',@SOP_F1,'N',100,'maxRuntime',3)
%
% runs PSO with a population size of 100 on SOP_F1 for 3 seconds.
%
% platemo('algorithm',{@KnEA,0.4},'problem',{@WFG4,6},'M',5)
%
% runs KnEA on 5-objective WFG4 and sets the parameters in KnEA and WFG4.
%
% for i = 1 : 10
% platemo('algorithm',@MOEAD,'problem',@ZDT1,'save',5,'run',i)
%