本記事でわかる事
- 購入したベトナム産のデルタロボット(Delta X2)について
- 組み立て
- PCとの接続
- ピッキング作業の実装 (後編)
Delta XのHP
1. ベトナム産のデルタロボット(Delta X2)について
デルタロボット(パラレルリンクロボット)をベトナムのDeltaXという会社(IMWI Technology大学のDeltaX team?)から購入した。自分が買ったのは、Delta X 2 Pick & Place Kit($699)。
PayPalで支払えるし、海外の記事で結構使える、と紹介されていたので買ってみることにした。
兵庫県への輸送代は$80。購入後3週間ほどして梱包材でグルグルにされた状態で無事に届いた。
なお、コロナキャンペーン?で約$70を値下げしてくれた。

特徴1: オープンソース
オープンソースをうたい、ファームウェアやロボット操作用のソフトがGithubに公開されている。(2019年時点のもので、最新バージョンより古いようだが。)
さらに、ソフトだけでなくハードウェアの部材も一式情報が公開されていて、3Dプリンターの部材図面も含まれている。
その気になれば、ゼロから作ることができるようになっているのが凄い。
特徴2: 複数の制御方法
制御には、GコードというNCマシンなどの制御で使われている手順型の言語を用いているため、彼らが提供するロボット制御ソフト(Delta X Software)を使わずに、ArduinoやRasPi、C#やpythonからもロボットを制御することができる。

特徴3: 便利なエンドエフェクタ付き
ホビー使いの自分には十分な種類のエンドエフェクタが用意されていた。
安価な部材と3Dプリンタの治具で組み立てられたもので耐久性などは期待できないが、ホビー用には十分だ。
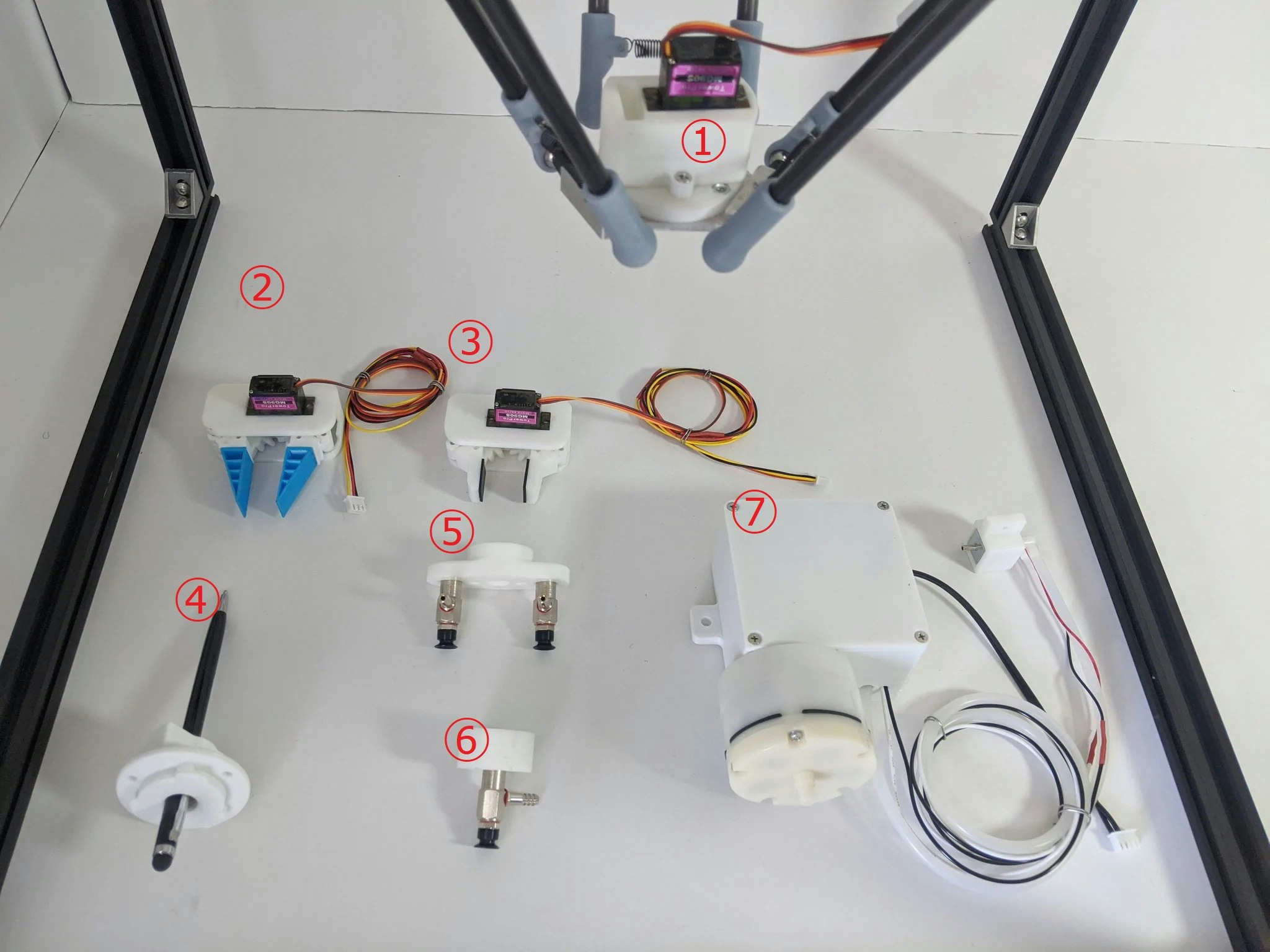
Delta X 2 Pick & Place Kit($699)に含まれていた一式は以下の通り;
①エンドエフェクタの手元を回転させるサーボモータ
②サーボモータでのグリッパー
③サーボモータでのグリッパー
④ペンのホールダー(ペン付き)
⑤吸引式
⑥吸引式
⑦エアーポンプ
(②~⑥を1つ選んで、①の先端に付ける感じ。⑦は⑤・⑥を使うときに接続させる。)
2. 組み立て
組み立ては簡単で、必要な道具類も全て梱包されていた。
手順は彼らのHPで確認可能。
3. PCとの接続
結論から言うと、Bluetooth接続がPCと接続する最も簡単な方法でうまくできた。手順はこちらに記載されている。
なお、AruduinoなどのBluetoothがないシングルボードを使うことを想定し、
有線での制御をtutorialに従ってトライしたが、自分はうまくいかなかった。
(切り分けテストのため、USB-TTLコンソールまで買って試したがダメだった。幸い、部材まで含めて全て公開されているので、おいおい切り分けテストをして原因究明をしようと思っている。)
・・・
と、初めての投稿で時間が足りなくなったので、DeltaXを使ったピッキングの実装は、後編に記載しようと思う。
ここまでの、とりあえずの結論としては、
DeltaXロボットは、コスパが良い。日本でデルタロボットをホビー用で調達する場合、現時点ではベストパフォーマンスなのではないかと思っている。
ご意見あれば何なりと。