最近購入したVelodyne VLP-16について紹介したいと思います。Velodyneの購入を考えている人の参考になればと思います。
Velodyne is 何?
3D LiDAR。自動運転の車とかについてるやつ。細かいところは以下を参考にしてください。
VLP-16 User Manual
Product brief
購入してみた
さすがに新品だと$4k以上するので今回はeBayで購入することにした。
今回購入したのはノーマルVLP-16。$275のベストオファーを出して承認されたので購入した。一応動作確認が取れているものを選定した。PayPalからの請求は¥49,178になった。
ちなみに裏でオークションのやつにも手を出していたが負けてしまった。

届くまで
アメリカからの発送という事もありなかなか不安な日々を過ごした。
- 11/18 アメリカ合衆国コロラド州から発送される
- 11/19 FedEXに渡される
- 11/21 国際配送拠点があるアメリカ合衆国ケンタッキー州に到着する。
- 11/25 国際配送拠点から発送される
- 12/6 日本に到着して佐川に渡される
- 12/8 自宅に到着
いざ開封
届いた箱の写真は撮り忘れた。

特に大きな傷もなく問題無さそうであった。そしてありがたい事ことに業者の人がVelodyneのIPとかが書かれた紙も入れてきてくれた。
配線
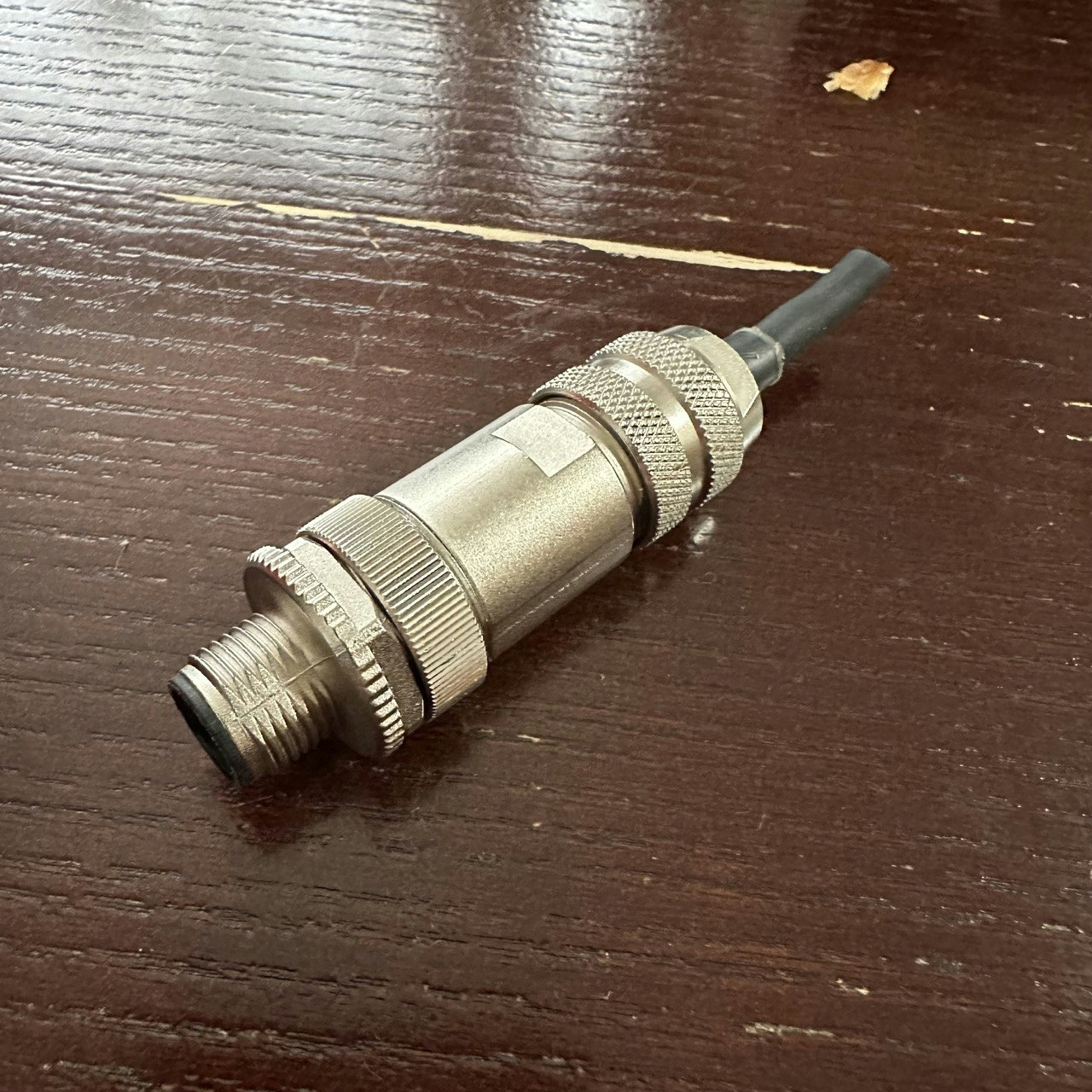
とりあえずこのコネクタは使わないので切ってしまう(一度も動かさずに切落とすのは心臓に悪い...)
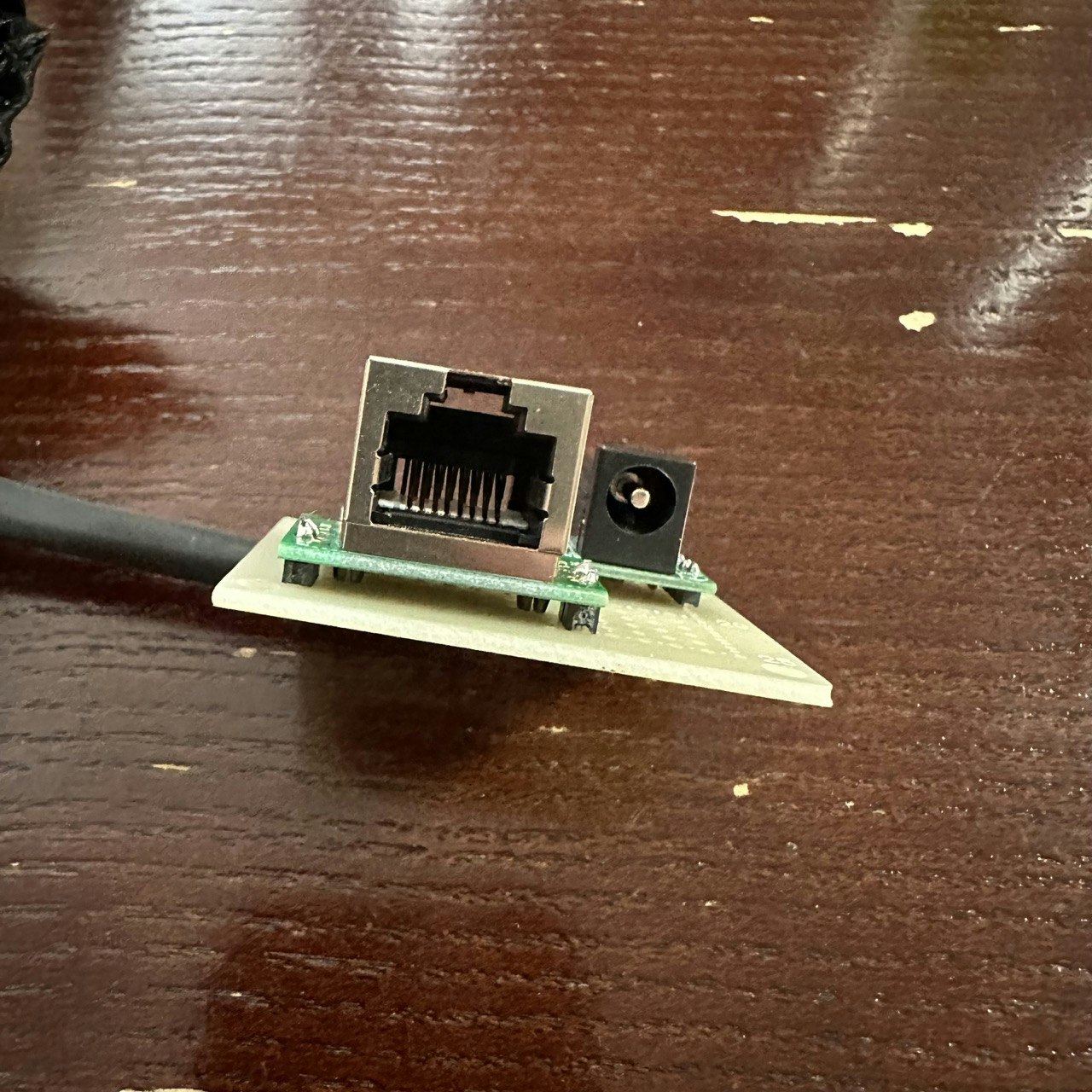
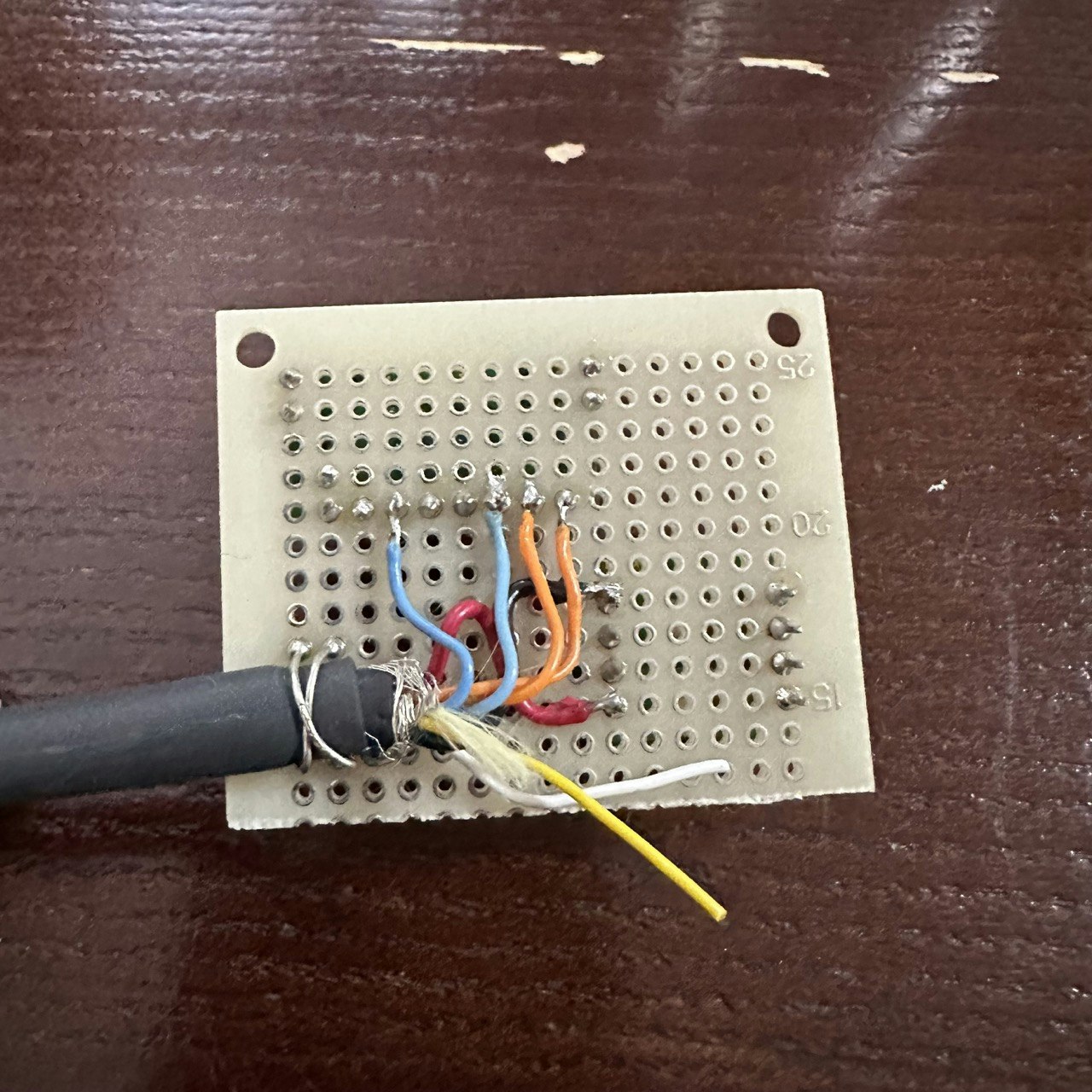
User Manualに従って配線を行う。なお購入した物は日に焼けていたのかLT ORANGEと ORANGEの違いが全くわからなかった。
いざ電源投入
"ウィーン"とモーターが回転する音がした。結構音がでかい。ACアダプタは12V2Aのものを使用。
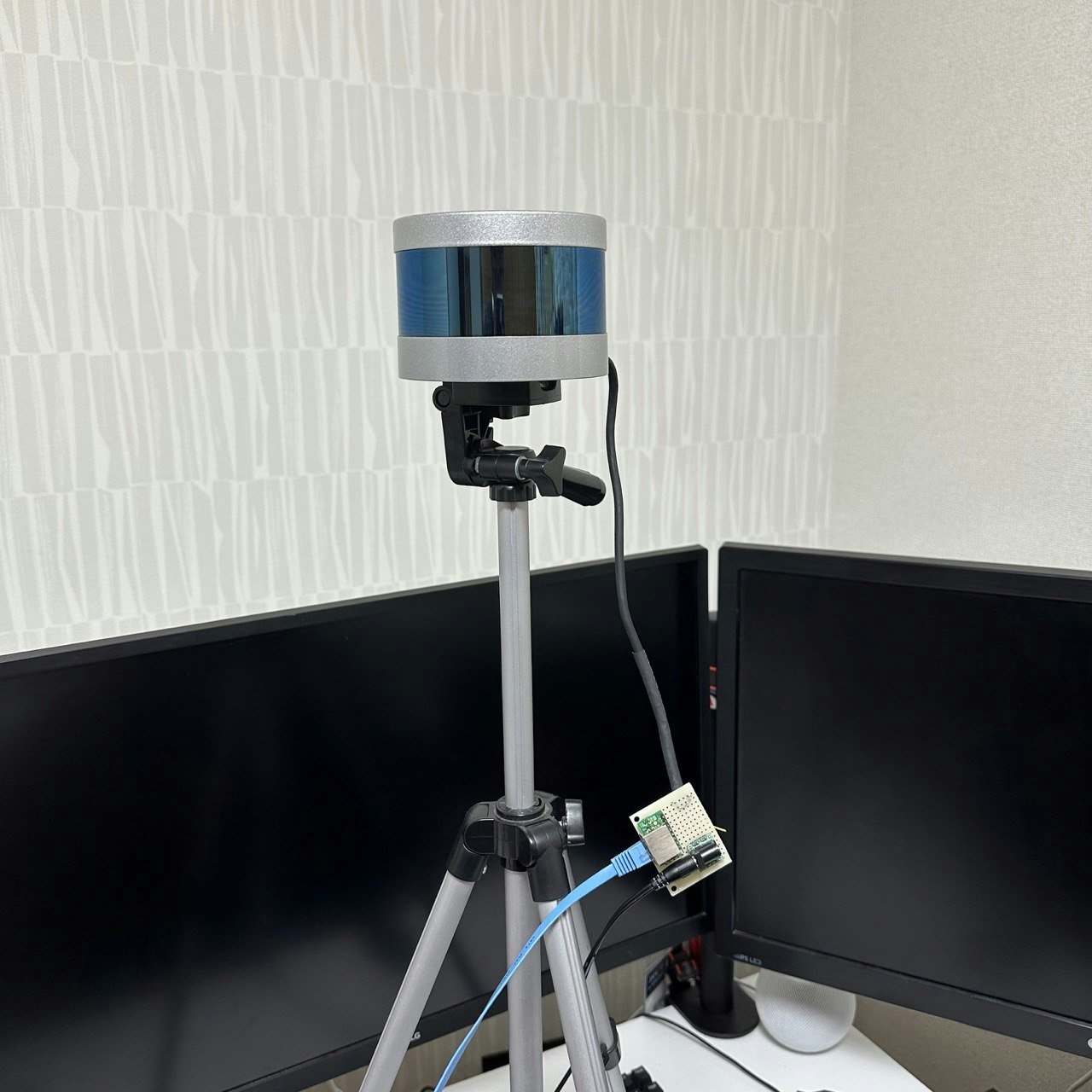
ルーターに接続。すると... ネットワークスキャナーツールに反応あり!& Wiresharkも見るとブロードキャスト宛のパケットあり!
Velodyneのipを叩くと以下の画面が...
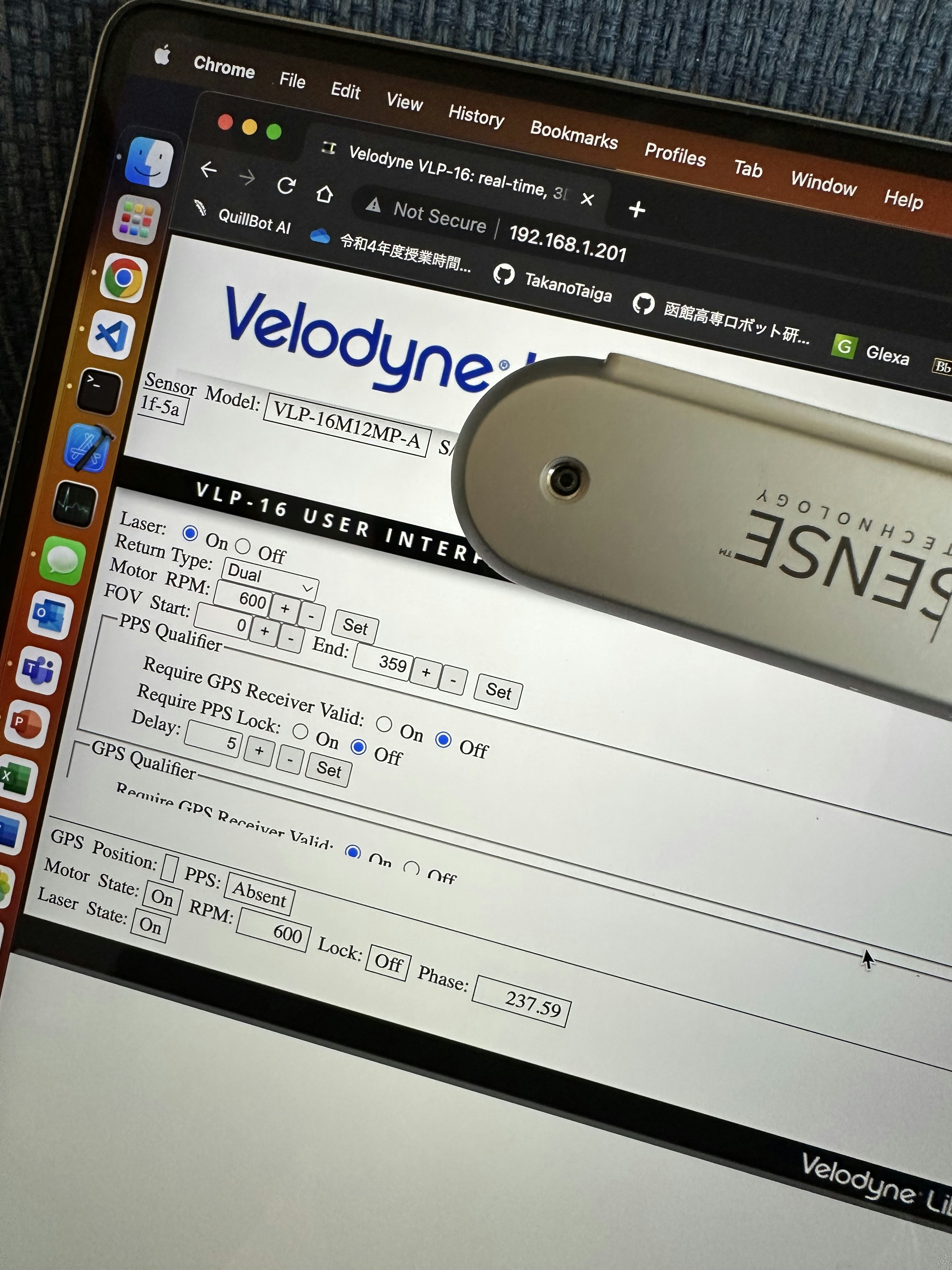
きたーー!ここまでくれば勝利したも同然。
ROS2(RViz)で見る
以下のリポジトリにROS2ブランチがあるのでそれをクローンしてcolcon build。
そしてlaunch
ros2 launch velodyne velodyne-all-nodes-VLP16-launch.py
そしてRviz2を起動。Fixed frame をVelodyneにしてPoint Cloudでtopicを指定する。そうすると以下のような点群が見れるはず。
最後に
想像よりデカいし重かった。まぁ辛いことがあっても家に帰ればVelodyneあるしとなるのでOKです。