OpenCV3.0 RGB-D Odometry 評価プログラム
- OpenCV3.0のmodulesにはrgbdモジュールが新たに追加されている。
- RGB-D (Direct法)によるOdometry推定に加えて、ICPとRGB-D ICPがある。
- サンプルには親切にTUMのRGB-D Datasetを用いたodometry評価用のプログラムがある。
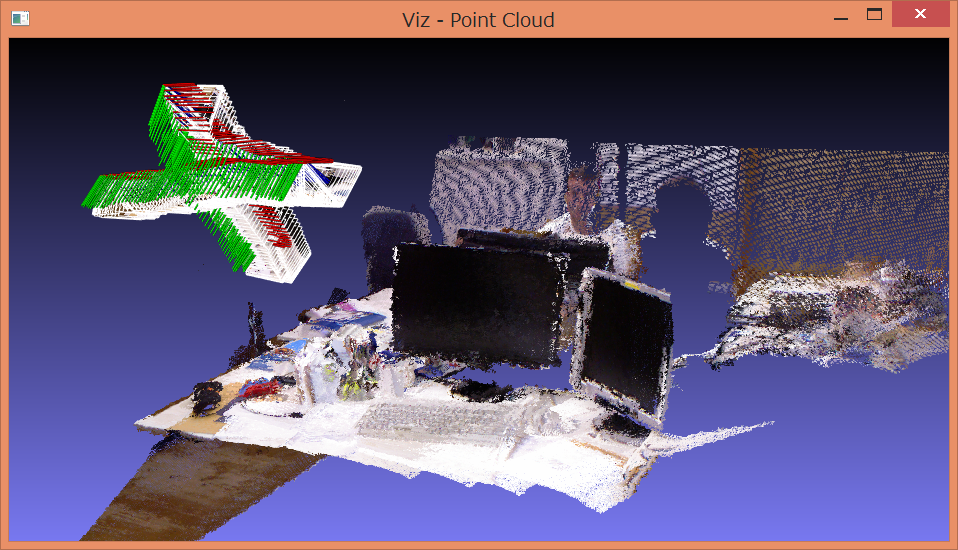
- Vizを用いて、3次元点群とカメラの軌跡を表示してみる。
- さらに、ICL-NUIMデータセットも用いれるようにした。
Vizを用いてかっこよく表示する
- VizWindow初期化
viz::Viz3d myWindow("Point Cloud");
/// Pose of the widget in camera frame
cv::Affine3d cloud_pose = cv::Affine3d().translate(cv::Vec3d(0.0f, 0.0f, 0.0f));
/// Pose of the widget in global frame
cv::Affine3d cloud_pose_global = cloud_pose;
cv::Affine3d cam_pose;
- 3次元点群の表示(10フレームごとに初期フレームへ変換した3次元点群を表示)
- 数フレームごとやダウンサンプリングして表示しないと重くなる
//10フレームごと変換して表示
Mat rot = Rts[count](Rect(0, 0, 3, 3)).t();
Mat tvec = Rts[count](Rect(3, 0, 1, 3)).t();
if (count % 10 == 0){
int downSamplingNum = 4; //e.g. 4
Mat image2(image.rows / downSamplingNum, image.cols / downSamplingNum, CV_8UC3);
resize(image, image2, image2.size(), 0, 0, INTER_LINEAR);
Mat pCloud(image.rows / downSamplingNum, image.cols / downSamplingNum, CV_64FC3);
for (int y = 0; y < 480; y += downSamplingNum){
for (int x = 0; x < 640; x += downSamplingNum){
if (depth.at<float>(y, x) < 8.0 && depth.at<float>(y, x) > 0.4){
//RGB-D Dataset
Mat pmat(1, 3, CV_64F);
pmat.at<double>(0, 2) = (double)depth.at<float>(y, x);
pmat.at<double>(0, 0) = (x - cx) * pmat.at<double>(0, 2) / fx;
pmat.at<double>(0, 1) = (y - cy) * pmat.at<double>(0, 2) / fy;
pmat = (pmat)*rot + tvec;
Point3d p(pmat);
pCloud.at<Point3d>(y / downSamplingNum, x / downSamplingNum) = p;
pmat.release();
}
else{
//RGB-D Dataset
pCloud.at<Vec3d>(y / downSamplingNum, x / downSamplingNum) = Vec3d(0.f, 0.f, 0.f);
}
}
}
viz::WCloud wcloud(pCloud, image2);
string myWCloudName = "CLOUD" + NumToString(count);
myWindow.showWidget(myWCloudName, wcloud, cloud_pose_global);
- カメラ軌跡の表示(frustumにimageを表示することもできる)
cam_pose = cv::Affine3d(rot.t(), tvec);
viz::WCameraPosition cpw(0.1); // Coordinate axes
viz::WCameraPosition cpw_frustum(cv::Matx33d(cameraMatrix), /*image,*/ 0.1, viz::Color::white()); // Camera frustum
string widgetPoseName = "CPW" + NumToString(count);
string widgetFrustumName = "CPW_FRUSTUM" + NumToString(count);
myWindow.showWidget(widgetPoseName, cpw, cam_pose);
myWindow.showWidget(widgetFrustumName, cpw_frustum, cam_pose);
myWindow.spinOnce(1, true);
実験環境
- Visual Studio 2013
- OpenCV3.0 (rgbd, viz)
- PC : intel Core i7-4600 CPU @2.1~2.7GHz 8GBメモリ
実行準備
- OpenCV3.0の導入はこちら
- OpenCV 3.0 の拡張モジュール群 opencv_contrib の導入が必要
- modulesのrgbd, vizのincludeファイルはopencv300\build\includeの下にコピペしておくこと
- ソースコードはこちら
- データセットのダウンロード(TUMデータセット、ICL-NUIMデータセット)
- 実行時にRgbd, ICP, RgbdICPのいずれかを引数として指定する。(Properties→Debugging→Command Arguments)
TUMデータセット:RGB-D SLAMの評価用データセット。軌跡の評価には、モーションキャプチャシステムにより得た高精度な真値が用いられる。※evaluate_toolsを用いてRGBとDepthフレームの同期associations.txtファイルの生成が必要。
ICL-NUIMデータセット:RGB-D SLAMの評価用データセット。軌跡だけでなく3次元再構築の評価もできる。データセットはPOV-Rayのシミュレーションにより生成されている。
結果
ダウンサンプリングせずに(downSamplingNum=1)表示した。ICPで推定したTUMデータセットfr1/xyzの結果。
- RGB-D ICPの精度が比較的良い。次にRGB-D(Direct法)。ICPは構造がはっきりしている環境でないとうまくいかない。
- RGB-Dが一番高速。(RGB-D ~30ms, ICP ~70ms, RGB-D ICP ~100ms)