開発環境
- Windows10 64bit
- Anaconda 2018.12
- Python 2.7.15
- Python 3.6.5
- Open3D v0.4.0
準備
1.RGB-D Datasetとrgbd_benchmark_toolsをダウンロードしてください。
2.AnacondaでPython2.7環境を作ります。こちらを参考にしてください。
3.下記コマンド(例)でrgbd_benchmark_toolsのassociate.pyを実行すると、タイムスタンプ、RGBとDepthのリストがassociations.txtに保存されます。RGBとDepthは非同期で取得されているため、タイムスタンプが近いRGBとDepthの組を生成しています。
python associate.py D:/TUM/rgbd_dataset_freiburg1_360/rgb.txt D:/TUM/rgbd_dataset_freiburg1_360/depth.txt > D:/TUM/rgbd_dataset_freiburg1_360/associations.txt
4.各シーンについてassociation.pyを実行します。
# associate_auto.py
import glob
import subprocess
import shutil
dirnames = glob.glob("../TUM/rgbd_dataset_freiburg*/")
for dirname in dirnames:
cmd = "python associate.py " + dirname + "rgb.txt " + dirname + "depth.txt > " + dirname + "associations.txt"
print(cmd)
res = subprocess.call(cmd, shell=True)
5.このような形になっていればOKです。

実行
1.Open3DのRGBD Odometryを用いて、カメラ軌跡を求めるプログラムを作成しました。Python3.6.5およびOpen3D v0.4.0を用いています。Open3Dの導入方法はこちら。
# rgbd_odometry_tum.py
from open3d import *
import numpy as np
import matplotlib.pyplot as plt
import cv2
import time
import math
import sys
# python rgbd_odometry_tum.py "../../TestData/camera_tum_1.json" "D:/TUM/rgbd_dataset_freiburg1_xyz/" "HybridRGB-DOdometryResult.txt"
if __name__ == "__main__":
print(len(sys.argv))
if len(sys.argv) != 4:
sys.exit()
pinhole_camera_intrinsic = read_pinhole_camera_intrinsic(sys.argv[1])
print(pinhole_camera_intrinsic.intrinsic_matrix)
dirname = sys.argv[2]
with open(dirname + "associations.txt", "r") as f:
line = f.readline()
lines = f.readlines()
# print (lines)
timestamps = []
Rts = []
Rts.append(np.eye(4,4))
elapsed_times = []
vis = Visualizer()
vis.create_window()
filename = line.replace('\n', '').split(" ")
timestamps.append(filename[0])
target_color = read_image(dirname + filename[1])
target_depth = read_image(dirname + filename[3])
target_rgbd_image = create_rgbd_image_from_tum_format(
target_color, target_depth)
cv2.imshow("image", cv2.cvtColor(np.array(target_color), cv2.COLOR_RGB2BGR))
cv2.imshow("depth", np.array(target_depth))
# cv2.waitKey(0)
option = OdometryOption()
odo_init = np.identity(4)
print(option)
flip_transform = [[1,0,0,0],[0,-1,0,0],[0,0,-1,0],[0,0,0,1]]
for num, line in enumerate(lines, start = 1):
start = time.time()
print("frame:", num)
filename = line.replace('\n', '').split(" ") #depthのファイル名に\nが含まれていた
timestamps.append(filename[0])
source_color = read_image(dirname + filename[1])
source_depth = read_image(dirname + filename[3])
source_rgbd_image = create_rgbd_image_from_tum_format(source_color, source_depth);
target_pcd = create_point_cloud_from_rgbd_image(
target_rgbd_image, pinhole_camera_intrinsic)
# source_rgbd_image = create_rgbd_image_from_color_and_depth(source_color, source_depth);
# plt.subplot(1, 2, 1)
# plt.title('TUM grayscale image')
# plt.imshow(source_rgbd_image.color)
# plt.subplot(1, 2, 2)
# plt.title('TUM depth image')
# plt.imshow(source_rgbd_image.depth)
# plt.show() # plt.pause(.01)
# cv2.imshow("image", np.array(source_rgbd_image.color))
# cv2.imshow("depth", np.array(source_rgbd_image.depth))
prevRt = Rts[-1]
print (Rts[-1])
# [success_color_term, trans_color_term, info] = compute_rgbd_odometry(
# source_rgbd_image, target_rgbd_image,
# pinhole_camera_intrinsic, odo_init,
# RGBDOdometryJacobianFromColorTerm(), option)
# if success_color_term:
# Rts.append(np.dot(prevRt, trans_color_term))
# print("Using RGB-D Odometry")
# print(trans_color_term)
#
# if num%30 == 1:
# source_pcd_color_term = create_point_cloud_from_rgbd_image(
# source_rgbd_image, pinhole_camera_intrinsic)
# source_pcd_color_term.transform(Rts[-1])
# source_pcd_color_term.transform(flip_transform)
# mesh_frame = create_mesh_coordinate_frame(size = 0.1, origin = [0,0,0])
# mesh_frame.transform(Rts[-1])
# mesh_frame.transform(flip_transform)
# vis.add_geometry(mesh_frame)
# vis.add_geometry(source_pcd_color_term)
# vis.run()
# # draw_geometries([target_pcd, source_pcd_color_term])
# else :
# trans_color_term = np.eye(4)
# Rts.append(np.dot(prevRt, trans_color_term))
[success_hybrid_term, trans_hybrid_term, info] = compute_rgbd_odometry(
source_rgbd_image, target_rgbd_image,
pinhole_camera_intrinsic, odo_init,
RGBDOdometryJacobianFromHybridTerm(), option)
if success_hybrid_term:
Rts.append(np.dot(prevRt, trans_hybrid_term))
print("Using Hybrid RGB-D Odometry")
print(trans_hybrid_term)
if num%30 == 1:
source_pcd_hybrid_term = create_point_cloud_from_rgbd_image(
source_rgbd_image, pinhole_camera_intrinsic)
# source_pcd_hybrid_term = voxel_down_sample(source_pcd_hybrid_term, voxel_size = 0.02)
source_pcd_hybrid_term.transform(Rts[-1])
source_pcd_hybrid_term.transform(flip_transform)
vis.add_geometry(source_pcd_hybrid_term)
mesh_frame = create_mesh_coordinate_frame(size = 0.1, origin = [0,0,0])
mesh_frame.transform(Rts[-1])
mesh_frame.transform(flip_transform)
vis.add_geometry(mesh_frame)
# draw_geometries([target_pcd, source_pcd_hybrid_term])
else :
trans_hybrid_term = np.eye(4)
Rts.append(np.dot(prevRt, trans_hybrid_term))
# mesh_frame = create_mesh_coordinate_frame(size = 0.1, origin = [0,0,0])
# mesh_frame.transform(Rts[-1])
# mesh_frame.transform([[1,0,0,0],[0,-1,0,0],[0,0,-1,0],[0,0,0,1]])
# vis.add_geometry(mesh_frame)
vis.update_geometry()
vis.poll_events()
vis.update_renderer()
# vis.run()
elapsed_time = time.time() - start
elapsed_times.append(elapsed_time)
print(elapsed_time*1000,"[ms]")
target_rgbd_image = source_rgbd_image
cv2.imshow("image", cv2.cvtColor(np.array(source_color), cv2.COLOR_RGB2BGR))
cv2.imshow("depth", np.array(source_depth))
c = cv2.waitKey(1) & 0xFF
if c == ord('q'):
break
with open(dirname + sys.argv[3], "w") as f:
for i, timestamp in enumerate(timestamps):
Rt = Rts[i]
rvec = cv2.Rodrigues(Rt[0:3,0:3])[0]
alpha = cv2.norm(rvec)
if alpha > sys.float_info.min:
rvec = rvec / alpha
alpha = 0.5 * alpha
cos_a = math.cos(alpha)
sin_a = math.sin(alpha)
rvec = rvec*sin_a
f.write(str(timestamp) + " " + " ".join(map(str, Rt[0:3,3])) + " " + " ".join(map(str,rvec[0,0:3])) + " " + str(cos_a) + " " + "\n")
vis.destroy_window()
print("mean:",np.mean(elapsed_times)*1000,"[ms]")
2.各シーンについて、カメラの軌跡を求めます。
# rgbd_odometry_tum_auto.py
import subprocess
import glob
dirnames = glob.glob("D:/TUM/*/")
# python rgbd_odometry_tum.py "../../TestData/camera_tum_1.json" "D:/TUM/rgbd_dataset_freiburg1_xyz/" "HybridRGB-DOdometryResult.txt"
for dirname in dirnames:
res = subprocess.call("python rgbd_odometry_tum.py ../../TestData/camera_tum_default.json " + dirname + " HybridRGB-DOdometryResult.txt", shell=True)
評価
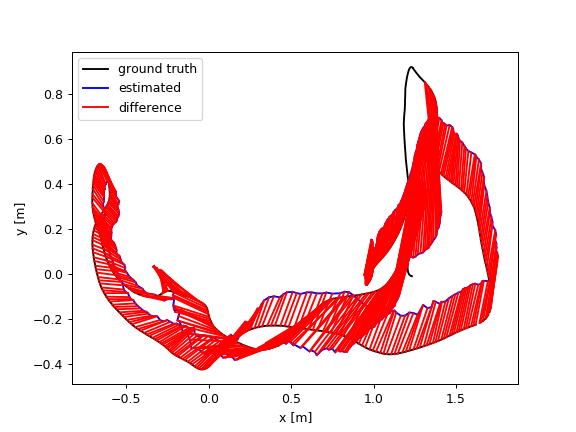
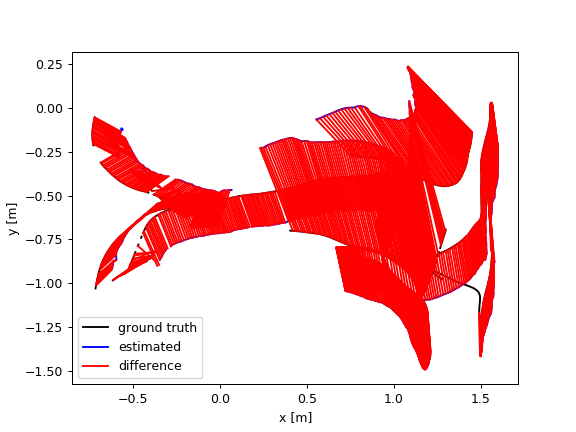
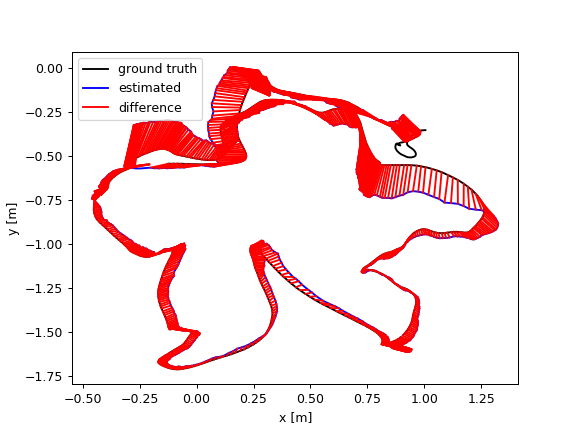
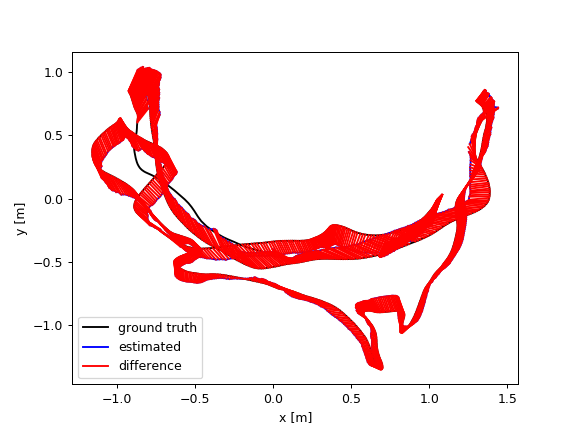
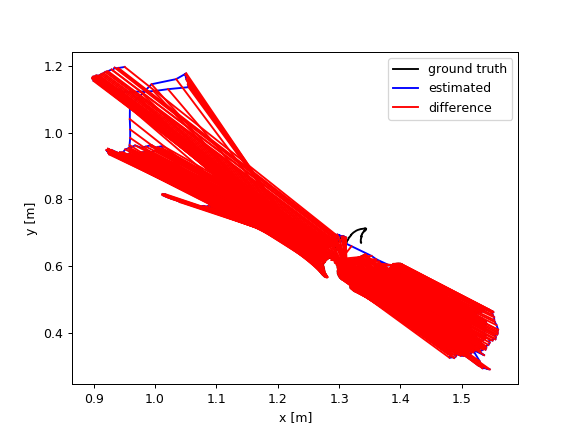
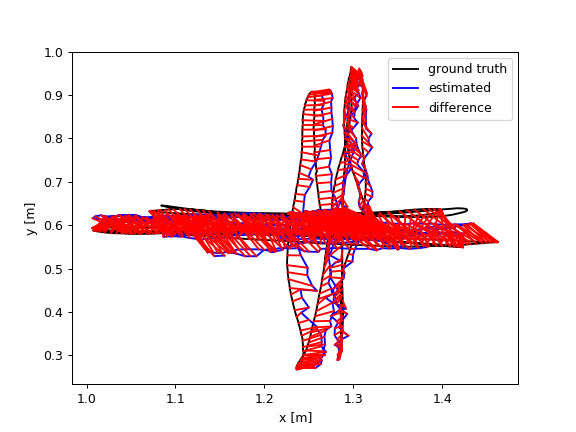
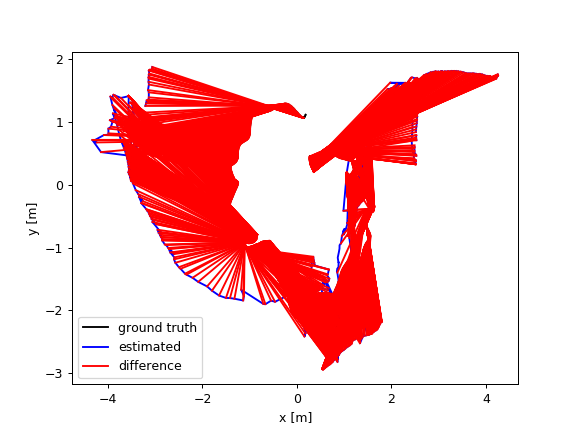
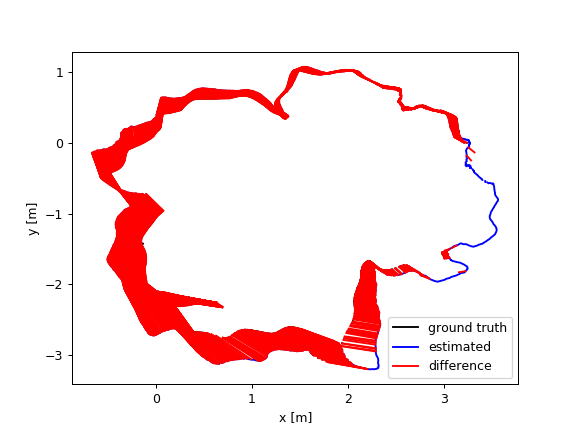
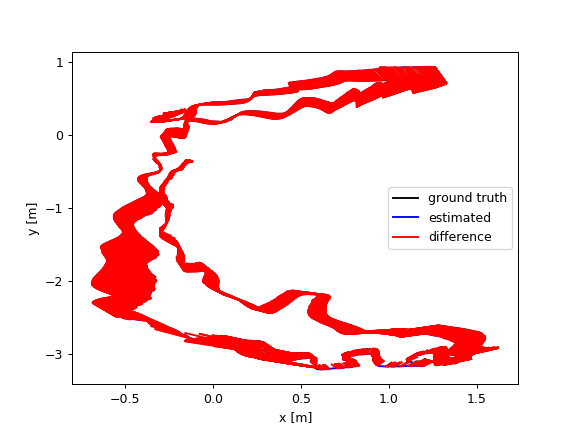
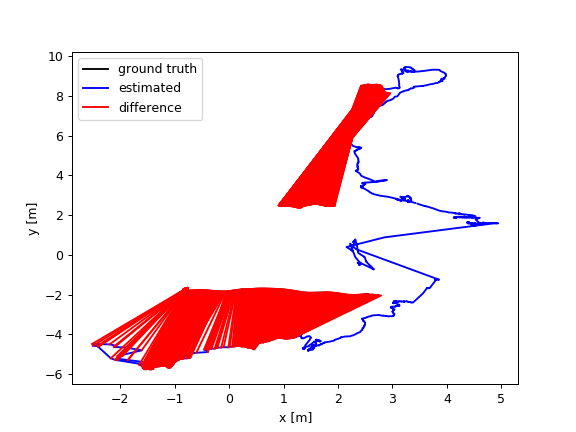
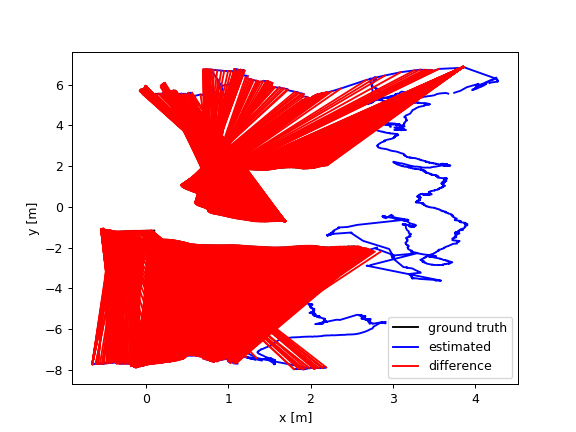
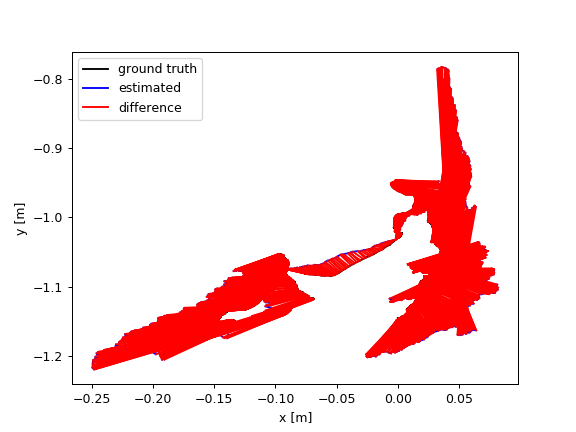
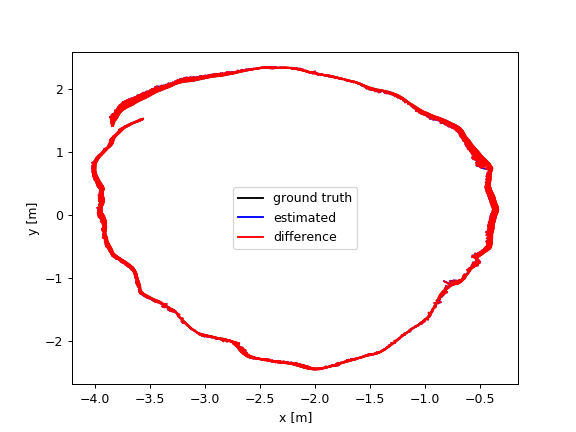
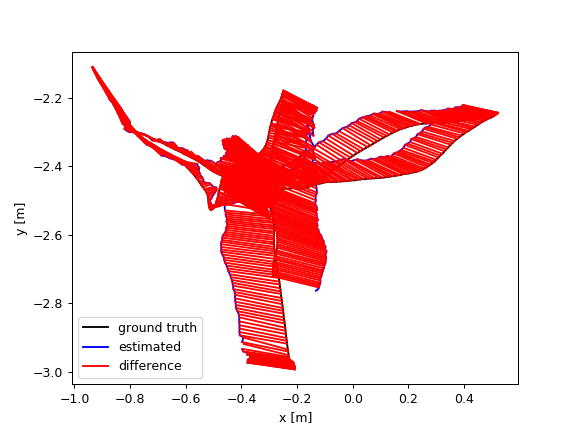
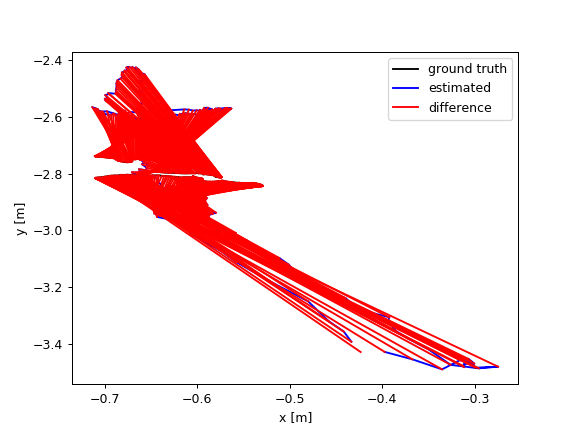
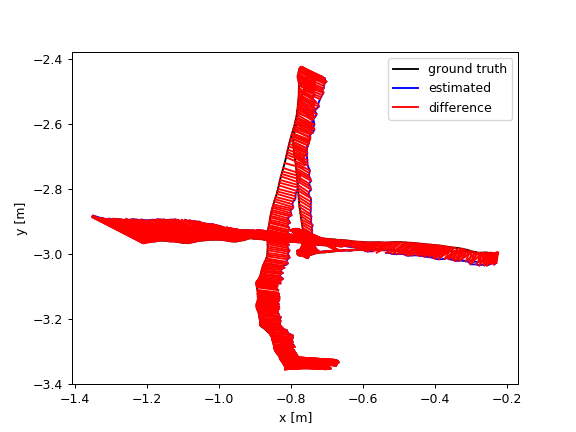
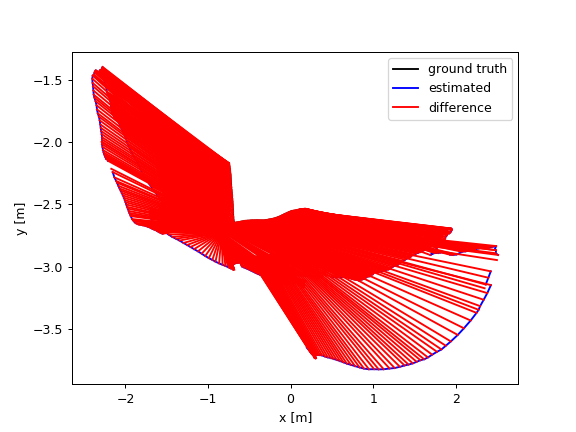
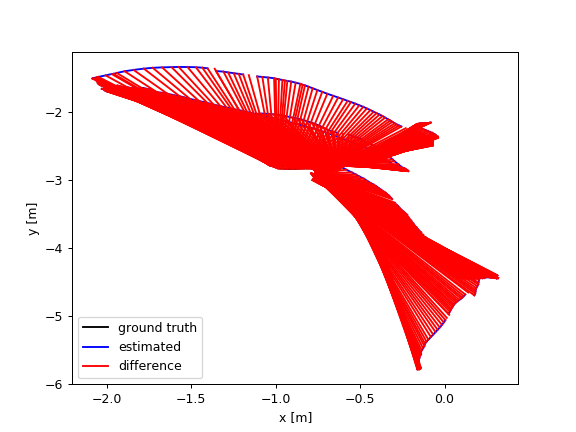
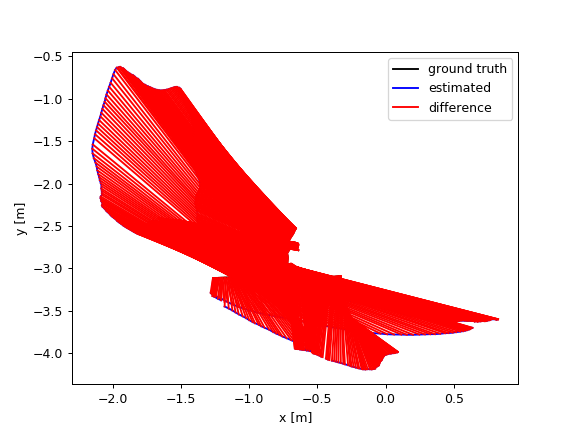
1.ATE(絶対軌跡誤差)を求めるには、下記コマンド(例)でrgbd_benchmark_toolsのevaluate_ate.pyを実行します。Python2.7.xを用います。
python evaluate_ate.py D:\TUM\rgbd_dataset_freiburg1_360\groundtruth.txt D:\TUM\rgbd_dataset_freiburg1_360\HybridRGB-DOdometryResult.txt --plot D:\TUM\rgbd_dataset_freiburg1_360\HybridRGB-DOdometryResult.png --verbose > D:\TUM\rgbd_dataset_freiburg1_360\HybridRGB-DOdometryEval.txt
2.各シーンについてATEを求めます。
# evaluate_ate_auto.py
import subprocess
import glob
dirnames = glob.glob("D:/TUM/*/")
# python evaluate_ate.py D:\TUM\rgbd_dataset_freiburg1_desk\groundtruth.txt D:\TUM\rgbd_dataset_freiburg1_desk\HybridRGB-DOdometryResult.txt --plot D:\TUM\rgbd_dataset_freiburg1_desk\HybridRGB-DOdometryResult.png --verbose > D:\TUM\rgbd_dataset_freiburg1_desk\HybridRGB-DOdometryEval.txt
for dirname in dirnames:
print(dirname)
groundtruth = dirname + "groundtruth.txt"
result = dirname + "HybridRGB-DOdometryResult.txt"
png = dirname + "HybridRGB-DOdometryResult.png"
evaluation = dirname + "HybridRGB-DOdometryEval.txt"
res = subprocess.call("python evaluate_ate.py " + groundtruth + " " + result + " --plot " + png + " --verbose > " + evaluation, shell=True )
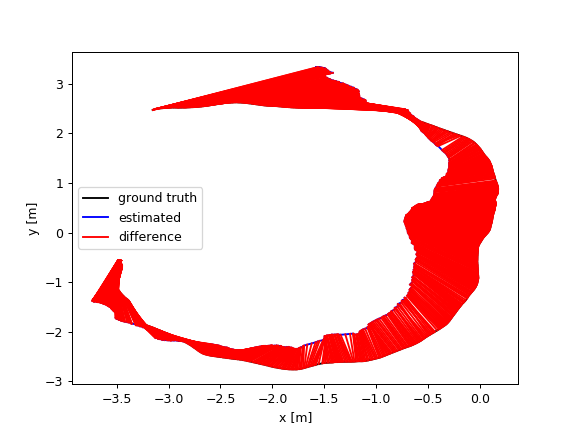
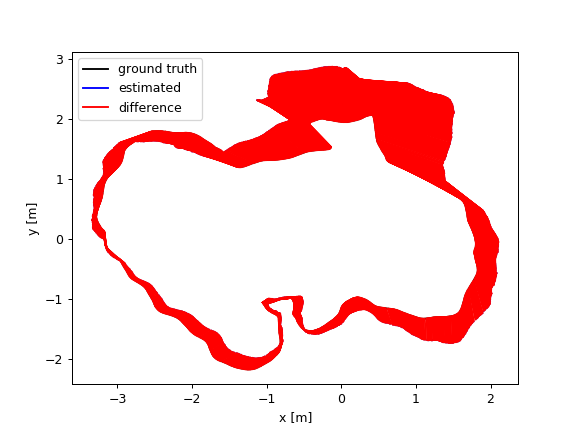
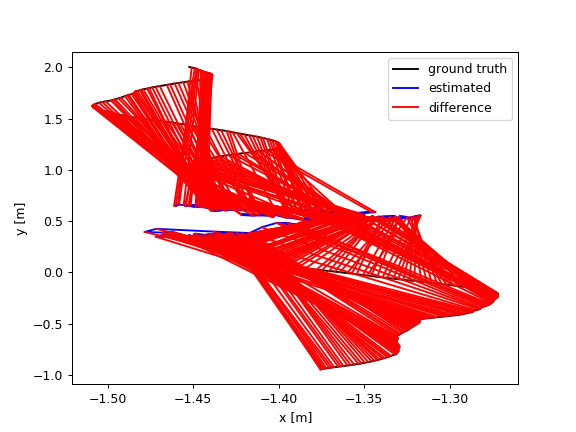
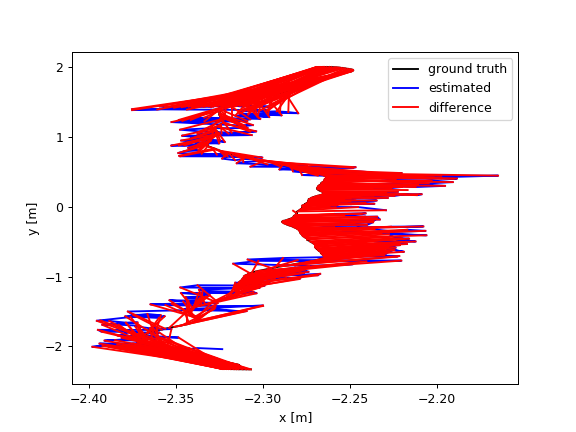
3.各シーンのATEの結果です。
| a | b | c |
|---|---|---|
| freiburg1_360 | freiburg1_desk | freiburg1_desk2 |
 |
 |
 |
| freiburg1_floor | freiburg1_plant | freiburg1_room |
 |
 |
 |
| freiburg1_rpy | freiburg1_teddy | freiburg1_xyz |
 |
 |
 |
| d | e | f |
|---|---|---|
| freiburg2_360_hemisphere | freiburg2_360_kidnap | freiburg2_desk |
 |
 |
 |
| freiburg2_desk_with_person | freiburg2_large_no_loop | freiburg2_large_with_loop |
 |
 |
 |
| freiburg2_pioneer_360 | freiburg2_pioneer_slam | freiburg2_pioneer_slam2 |
 |
 |
 |
| freiburg2_pioneer_slam3 | freiburg2_rpy | freiburg2_xyz |
 |
 |
 |
| g | h | i |
|---|---|---|
| freiburg3_cabinet | freiburg3_large_cabinet | freiburg3_long_office_household |
 |
 |
 |
| freiburg3_nostructure_notexture_far | freiburg3_nostructure_texture_far | freiburg3_nostructure_texture_far |
 |
 |
 |
| freiburg3_nostructure_texture_near_withloop | freiburg3_sitting_halfsphere | freiburg3_sitting_rpy |
 |
 |
 |
| freiburg3_sitting_static | freiburg3_sitting_xyz | freiburg3_structure_notexture_far |
 |
 |
 |
| freiburg3_structure_notexture_near | freiburg3_structure_texture_far | freiburg3_structure_texture_near |
 |
 |
 |
| freiburg3_teddy | freiburg3_walking_halfsphere | freiburg3_walking_rpy |
 |
 |
 |
| freiburg3_walking_static | freiburg3_walking_xyz | |
 |
 |
まとめ
- TUM RGB-D SLAM Dataset and Benchmarkの導入をしました。
- Open3DのRGB-D Odometryを用いてカメラの軌跡を求めるプログラムを作成しました。
- 評価ツールを用いて、ATEの結果をまとめました。
- これでSLAMの評価ができるようになりました。