はじめに
私は東京電機大学でロボットを個人的に制作しています。先日、かわさきロボット競技大会第2回テクノ・クエスト部門に参加し、以下の画像のロボット”遠隔しゅた~る・お利口”で出場しました。
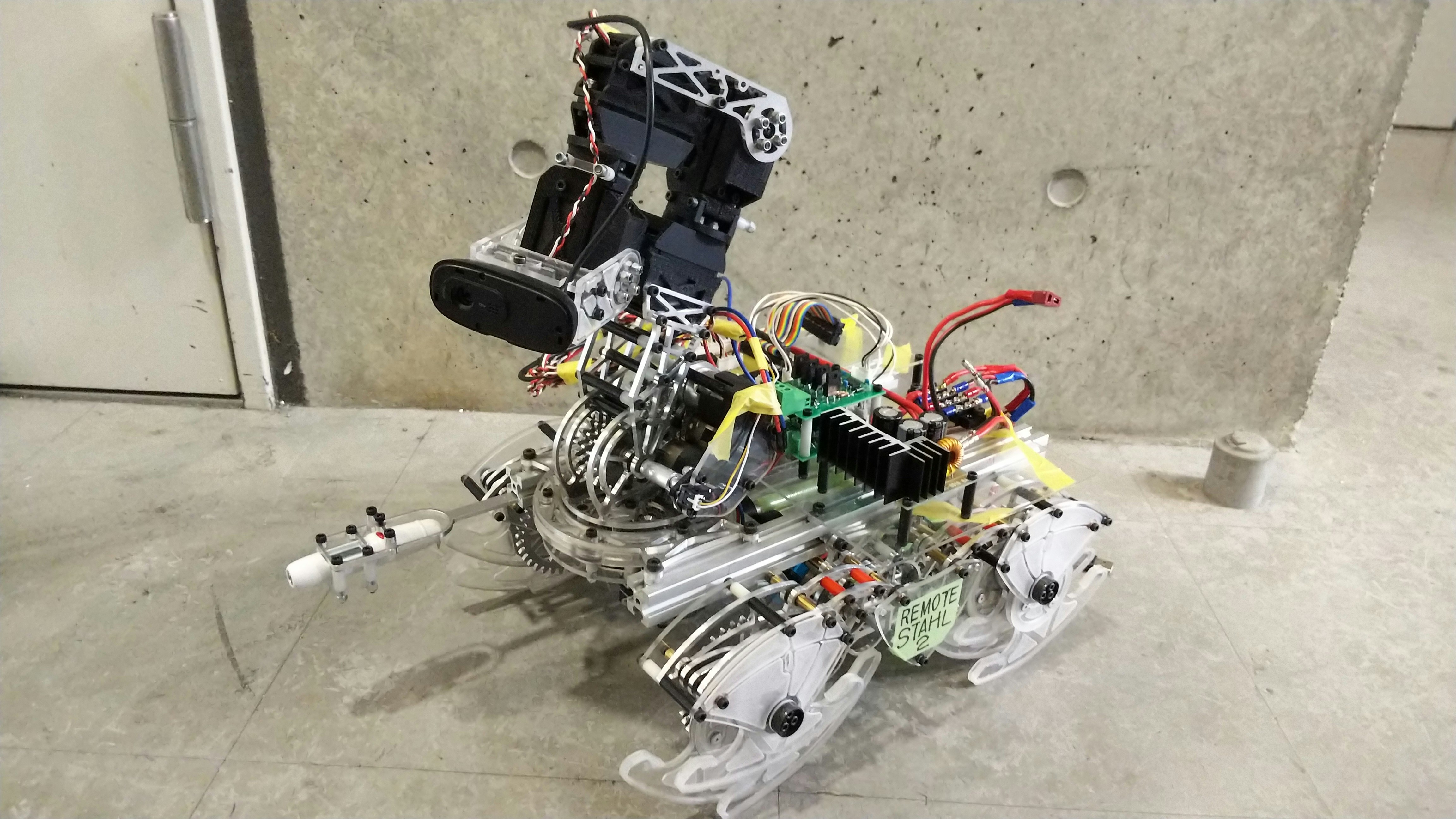
ここでは本機体で使用した技術を数回に分けて説明します。同様のロボットを制作したい方の参考になればと思います(あと備忘録).
概要
本機体のシステムの概要は以下の図のようになります。

ノートPCのゲストOS:Ubuntu 16.04 LTS上でROS kineticを起動しロボットを操作します。ロボットにはOS:Ubuntu MATE 16.04.2で動作するRaspberryPi3 ModelBを搭載し、同じくROSを使って機体の制御をします。無線LANルータを経由してWi-Fi通信で情報をやり取りし、ロボットのUSBカメラから映像を受信して、PS3用ジョイスティックで機体の操作情報を送信します。ロボットの各アクチュエータの制御はRaspberryPiのGPIOピンから行います。
目次
-
ROSを用いた自作ロボット制作 -開発環境-
ーーー随時追加しますーーー