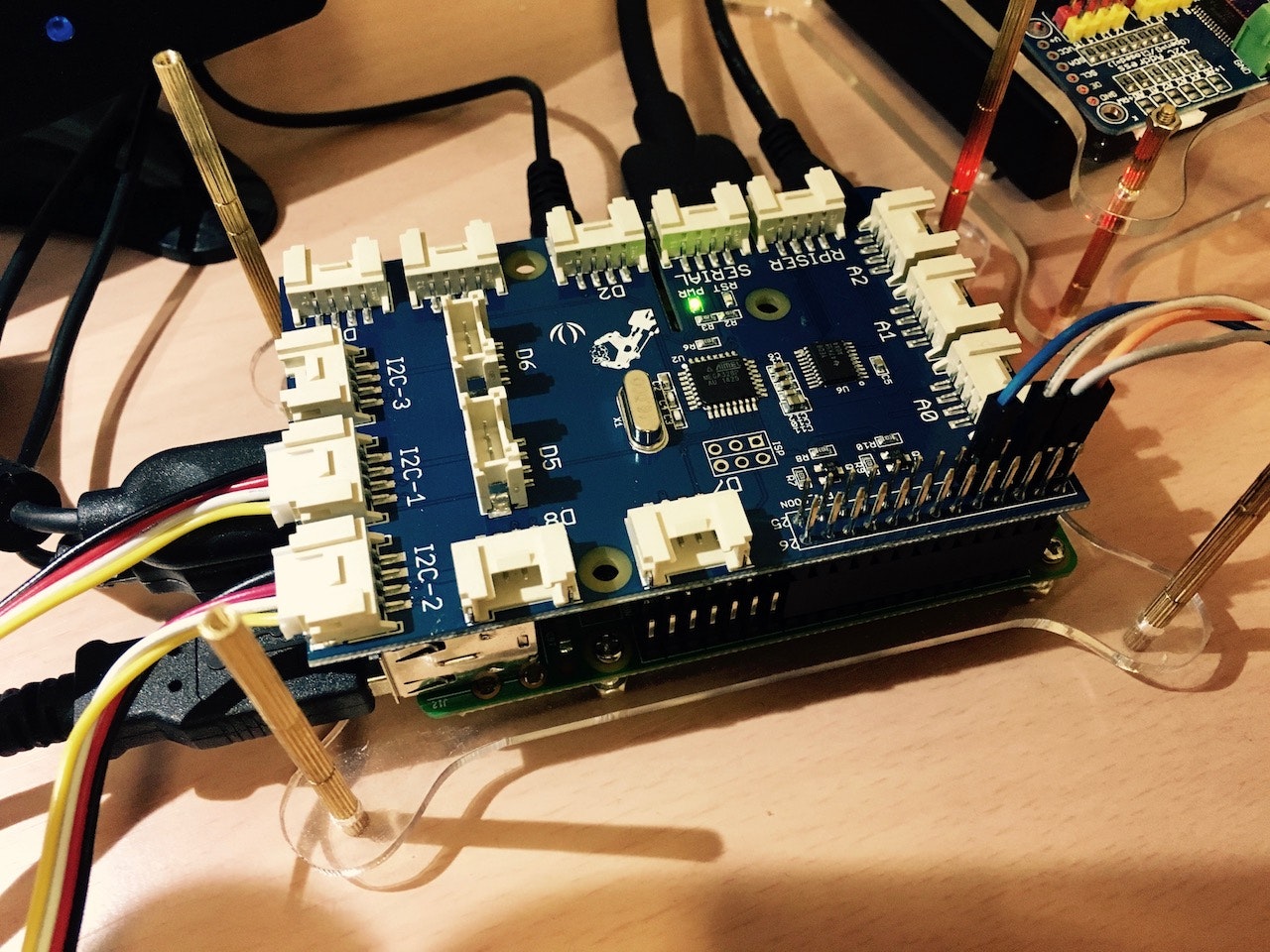
トイロボットを操作するのに使えそうだなと思っていた、ゼスチャーセンサーをRaspberryPiに取り付けてみました。こんな感じです。
結構いろんなゼスチャーに対応していて、9種類のゼスチャーに対応しています。Pythonで試してみたかったので、RaspberryPiにGroveシステムを接続出来る拡張ボード「GrovePi+」も合わせて購入してみました。
環境
- Raspberry Pi3 (RASPBIAN JESSIE WITH PIXEL 4.4 / Python 3.4.2)
- GrovePi
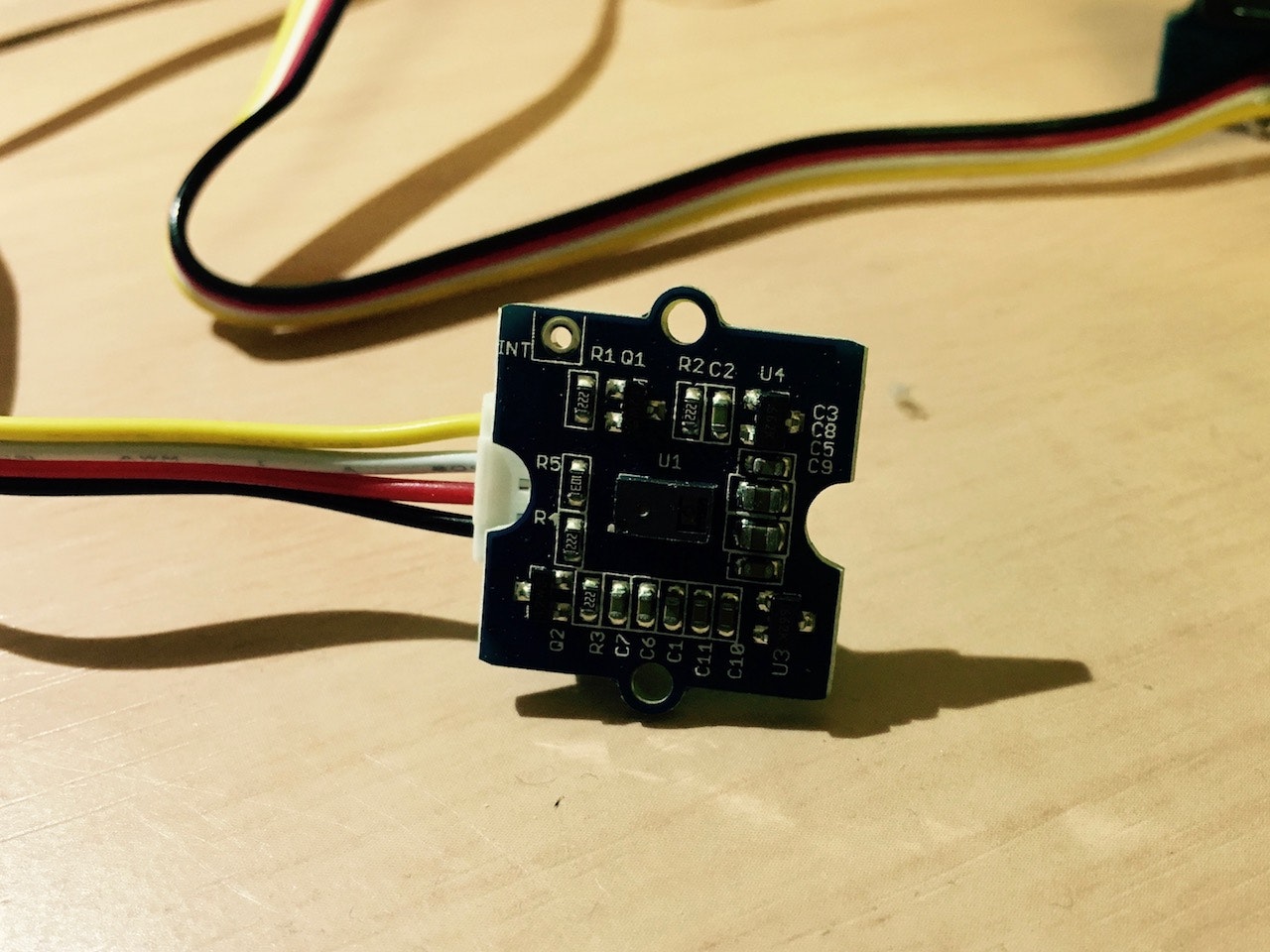
- GROVE - ジェスチャー
- GROVE - RGBバックライト液晶モジュール
GrovePiのセットアップ
結構古い情報が多いのですが、公式アカウントのGitHubよりライブラリをクローンし、インストールスクリプトを実行するだけで利用出来ます。
公式サイトのソフトウェアインストールのページに沿って実行します。
Setting Up The Software - Dexter Industries
$ cd /home/pi/Desktop
$ sudo git clone https://github.com/DexterInd/GrovePi
$ cd /home/pi/Desktop/GrovePi/Script
$ sudo chmod +x install.sh
$ sudo ./install.sh
インストールが完了したら、電源を落としてGrovePi+を取り付け、再度電源を入れます。ホームディレクトリよりI2C接続を確認します。
$ sudo i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- 04 -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
Pythonライブラリ(Python3対応)を使う
公式ページのこちらでテスト済みのGroveモジュールが確認出来ますので事前に確認すると良いと思います。Pythonライブラリは
DexterInd/GrovePi/Software/Python - GitHub
こちらにあるのでサンプルコードを加工して利用することが出来ます。Python3系で利用出来ます。
今回はゼスチャーセンサと
Grove - Gesture Sensor v1.0 Python library and examples - GitHub
RGBバックライト液晶モジュールを使います。
ゼスチャーの種類
ゼスチャーセンサーを利用する際は、上記のサンプルコードよりgrove_gesture_sensor.pyを読み込みインポートして使います。
思ったより反応も良いので各ゼスチャーを紹介します。
UP(上)
DOWN(下)
RIGHT(右)

LEFT(左)
ちょっと面白いゼスチャーも対応しています。
CLOCKWISE(時計回り)
ANTI_CLOCKWISE(反時計回り)
WAVE(波)
FORWARD(接近)
あとは BACKWARD を入れて9種類のゼスチャーに対応しています。
まとめ
センサーが反応する距離は大体30cm位なので、デスク周りに設置して、音楽再生などをしたりするのに向いているかもしれません。
ちょっと未来っぽい気分になれますね。