使用するもの
・Raspberry Pi Zero
・角が直角のもの(ティッシュの箱など)
・HCSR-04センサ×2
・プレッドボード
・ジャンパー
Raspberry Piとセンサを接続する
HCSR-04とRaspberry Pi Zeroをジャンパ等で接続する
今回は接続方法については割愛する.詳細はこちらからhttps://algorithm.joho.info/programming/python/raspberry3-ultrasonic-distance-sensor-hcsr04/
また,センサと検出対象の物体の配置図は以下の図を参照する
検出方法
検出は3つのステップで行います.また,すべてのステップではHCSR-04センサの位置は変更していません
・L:物体の中央線とセンサ間の距離(A,Bとも同じ距離である)
・ℓ:センサAと物体との距離
・ℓ’:センサBと物体との距離
初期状態
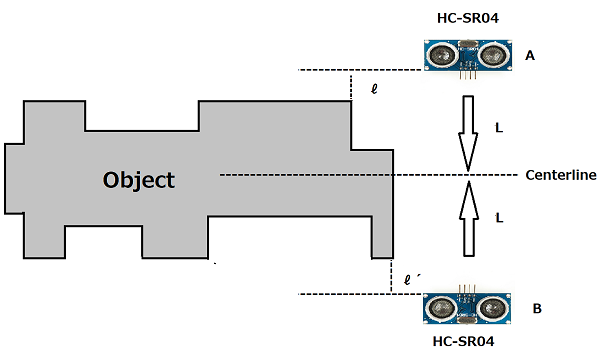
ここでセンサAとセンサBとの距離を取得する
⇒実際に物体を通し始めるのを判定するため(距離はL+L=2Lとなります。)
物体との距離の計測時
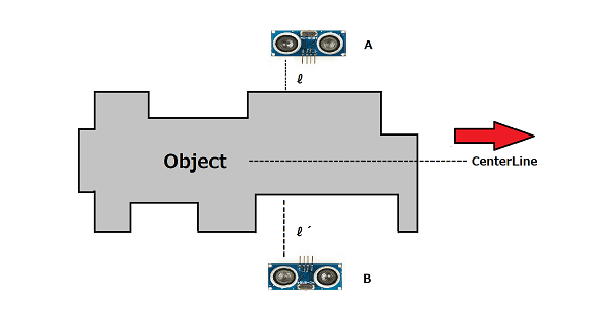
Objectはゆっくりとできるだけ一定の距離で矢印の方向に動かします.速く動かしてしまうと距離がうまく取れなくなってしまいます.
また,矢印の方向以外に動かしてはいけません.
計測終了時
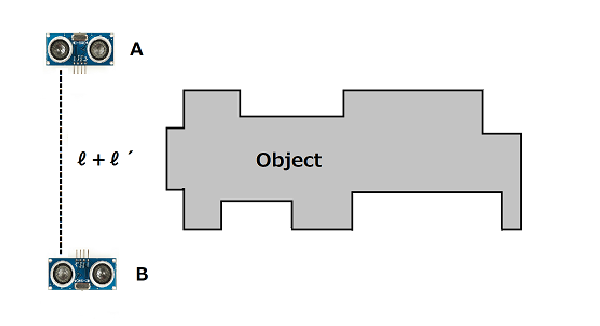
Objectがセンサ間を通し終えたら再びセンサA,Bとの距離を取得することになります.
実際に分析してみる
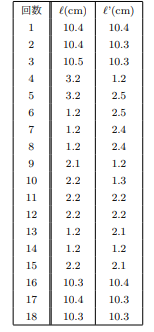
上の表は計測が終えてRasberryPiで得るであろうセンサデータをまとめたものです.凹凸の検出はこのデータをもとに行います.物体の端は4回目の距離から変化しているので実際に超音波距離センサが物体を検知したといえます.
また,物体の最後の端の判定は16回目から18回目の値が初期状態とほぼ一致しているので物体が計測し終えたと言えます.