 でもBMX055はもうディスコンらしい
でもBMX055はもうディスコンらしい
修正
コード中の加速度センサの計算の乗数について、秋月のマニュアル通りにしておりましたが、誤植があったとのことです。数値を修正してご活用ください。(2023.12.17修正)
前回記事
の続きです。
やること
9軸センサのBMX055とESP32devkitCの組み合わせでMadgwickフィルタを使います。
そのメモです。
BMX055は絶版らしく、代わりにBNO055が店頭に出ています。
BNO055はセンサーフュージョンもついていて性能も良いようですが、まずはBMX055を動かします。
準備物・実施環境
- ESP32devkitC
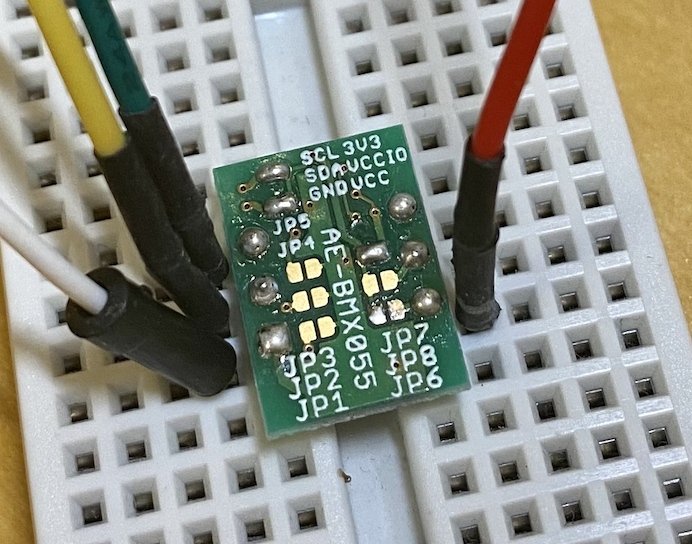
- 秋月の9軸センサ AE-BMX055
- Arduino IDE
参考
下記のサイトを参考にさせていただきました。
接続
| AE-BMX055 | ESP32devkitC |
|---|---|
| VCC | 5V |
| GND | GND |
| SDA | SDA(Pin21) |
| SCL | SCL(Pin22) |
ESP32DevkitCのSDA,SCLのデフォルトピンが上記になります。
ピンを変更したい場合はWire.begin(,);で変更ができます。Wire.begin(18,19);で動くことが確認できました。
ジャンパピン
| AE-BMX055 | ジャンパ内容 | |
|---|---|---|
| JP1,JP2,JP3 | アドレス設定 | オープン |
| JP4,JP5 | プルアップ | ショート |
| JP6 | 電源設定 | オープン |
| JP7 | 電源設定 | ショート |
| JP8 | 電源設定 | オープン |
ショートすべき箇所をハンダブリッジで接続します。
上記の設定では、I2Cアドレスはデフォルト値、プルアップ有効、
電源設定は入力3.3V or 5V、信号レベルが3.3Vとなるようにしています。
プログラム
秋月のサンプルコードを少し改造し、割り込み処理にて
ロール軸、ピッチ軸、ヨー軸の値をシリアルに出力します。
ESP32系
#include<Wire.h>
#include<MadgwickAHRS.h>
Madgwick MadgwickFilter;
#include <Ticker.h>
Ticker magdwickticker;
#define MagdwickHz 100 //周波数。1秒間に何回データを読み込むかの値
const float magdwickinterval = 1000 / MagdwickHz;
// BMX055
#define Addr_Accl 0x19 // 加速度センサのI2Cアドレス
#define Addr_Gyro 0x69 // ジャイロセンサのI2Cアドレス
#define Addr_Mag 0x13 // 磁気センサのI2Cアドレス
// センサーの値を保存するグローバル変数
float ax = 0.00;
float ay = 0.00;
float az = 0.00;
float gx = 0.00;
float gy = 0.00;
float gz = 0.00;
int mx = 0.00;
int my = 0.00;
int mz = 0.00;
float pitch = 0.00;
float roll = 0.00;
float yaw = 0.00;
void BMX055_Init() //BMX055の初期化
{
Wire.beginTransmission(Addr_Accl);
Wire.write(0x0F); // Select PMU_Range register
Wire.write(0x03); // Range = +/- 2g
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Accl);
Wire.write(0x10); // Select PMU_BW register
Wire.write(0x08); // Bandwidth = 7.81 Hz
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Accl);
Wire.write(0x11); // Select PMU_LPW register
Wire.write(0x00); // Normal mode, Sleep duration = 0.5ms
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x0F); // Select Range register
Wire.write(0x04); // Full scale = +/- 125 degree/s
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x10); // Select Bandwidth register
Wire.write(0x07); // ODR = 100 Hz
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x11); // Select LPM1 register
Wire.write(0x00); // Normal mode, Sleep duration = 2ms
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4B); // Select Mag register
Wire.write(0x83); // Soft reset
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4B); // Select Mag register
Wire.write(0x01); // Soft reset
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4C); // Select Mag register
Wire.write(0x00); // Normal Mode, ODR = 10 Hz 0x00 //100Hz 0x07
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4E); // Select Mag register
Wire.write(0x84); // X, Y, Z-is enabled
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x51); // Select Mag register
Wire.write(0x04); // No. of Repetitions for X-Y is = 9
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x52); // Select Mag register
Wire.write(0x16); // No. of Repetitions for Z-Axis = 15
Wire.endTransmission();
}
void BMX055_All() //BMX055から全データとMadgwickフィルタの結果を取得する
{
unsigned int data[8];
//加速度データを取得する
for (int i = 0; i < 6; i++)
{
Wire.beginTransmission(Addr_Accl);
Wire.write((2 + i));// Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Accl, 1);// Request 1 byte of data
// Read 6 bytes of data
// ax lsb, ax msb, ay lsb, ay msb, az lsb, az msb
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data to 12-bits
ax = ((data[1] * 256) + (data[0] & 0xF0)) / 16;
if (ax > 2047) ax -= 4096;
ay = ((data[3] * 256) + (data[2] & 0xF0)) / 16;
if (ay > 2047) ay -= 4096;
az = ((data[5] * 256) + (data[4] & 0xF0)) / 16;
if (az > 2047) az -= 4096;
ax = ax * 0.0098; // range = +/-2g
ay = ay * 0.0098; // range = +/-2g
az = az * 0.0098; // range = +/-2g
// 上記の乗数は秋月のマニュアル通りですが、誤植とのことです。
// 正しくは、mg換算で0.98、G換算で0.00098
// とのことです。
//ジャイロデータを取得する
for (int i = 0; i < 6; i++)
{
Wire.beginTransmission(Addr_Gyro);
Wire.write((2 + i)); // Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Gyro, 1); // Request 1 byte of data
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data
gx = (data[1] * 256) + data[0];
if (gx > 32767) gx -= 65536;
gy = (data[3] * 256) + data[2];
if (gy > 32767) gy -= 65536;
gz = (data[5] * 256) + data[4];
if (gz > 32767) gz -= 65536;
gx = gx * 0.0038; // Full scale = +/- 125 degree/s
gy = gy * 0.0038; // Full scale = +/- 125 degree/s
gz = gz * 0.0038; // Full scale = +/- 125 degree/s
//コンパスデータを取得する
for (int i = 0; i < 8; i++)
{
Wire.beginTransmission(Addr_Mag);
Wire.write((0x42 + i)); // Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Mag, 1); // Request 1 byte of data
// Read 6 bytes of data
// mx lsb, mx msb, my lsb, my msb, mz lsb, mz msb
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data
mx = ((data[1] << 5) | (data[0] >> 3));
if (mx > 4095) mx -= 8192;
my = ((data[3] << 5) | (data[2] >> 3));
if (my > 4095) my -= 8192;
mz = ((data[5] << 7) | (data[4] >> 1));
if (mz > 16383) mz -= 32768;
MadgwickFilter.update(gx, gy, gz, ax, ay, az, mx, my, mz);
float pitch = MadgwickFilter.getPitch();
float roll = MadgwickFilter.getRoll();
float yaw = MadgwickFilter.getYaw();
Serial.print(pitch);
Serial.print(",");
Serial.print(roll);
Serial.print(",");
Serial.print(yaw);
Serial.println("");
}
void setup()
{
MadgwickFilter.begin(MagdwickHz);
Wire.begin();//I2Cの初期化
Serial.begin(2000000); //デバッグ用シリアル通信
BMX055_Init(); //BMX055の初期化
//#define MagdwickHz で設定した周波数にてセンサー読み取りを割り込み実行
magdwickticker.attach_ms(magdwickinterval, BMX055_All);
delay(300);
}
void loop()
{
}
実行
実行してArduino IDEのツールメニューより「シリアルプロッタ」を選択します。
開始から20秒ほどで値が安定します。
センサの傾きにグラフが反応します。
おわりに
秋月のサンプルに若干手を加えていますが、もっとコンパクトにする方法があるような気はしています。
また、とりあえず動作するというレベルですので、調整は必要かと思います。
Processingを使った画面描画で動作を確認したい場合には、下記の記事が参考になるかもしれません。