ほどよい計算機が欲しい
ほどよい計算機が欲しい
やること
URDFに入力するイナーシャを簡易計算します。
そのままURDFにコピペできる出力できる形式に出力します。
作業環境
- python
参考
ズバリnpakaさんのコードを自分用にちょっと改造したものになります。↓
計算式はEMANさんのサイトを参考にさせていただきました。↓
ありがとうございます。
今回の計算機の特徴
- 直方体の形状のみ計算します。
- 重量の単位をグラム、ミリでも入力できます。
- 偏心がある場合も入力できます。
- URDFにコピペできる一行で計算できます。
パラメーターを入れたモデルをシミュレーターにかける場合、部品の回転軸がどこにあるかは気にせず、部品自体のイナーシャを求めればよいようです。
github
コード案
inertia_calc.py
# Boxの計算
def calculate_box_inertia_with_offset(m, w, d, h, dx, dy, dz):
# 基本的な慣性モーメント
Iw = (m / 12.0) * (d**2 + h**2)
Id = (m / 12.0) * (w**2 + h**2)
Ih = (m / 12.0) * (w**2 + d**2)
# 平行軸定理による修正
Iw += m * (dy**2 + dz**2)
Id += m * (dx**2 + dz**2)
Ih += m * (dx**2 + dy**2)
# 慣性積の計算
ixy = -m * dx * dy
ixz = -m * dx * dz
iyz = -m * dy * dz
# 非常に小さい値を0.0として扱う
ixy = 0.0 if abs(ixy) < 1e-10 else ixy
ixz = 0.0 if abs(ixz) < 1e-10 else ixz
iyz = 0.0 if abs(iyz) < 1e-10 else iyz
print(f'<inertia ixx="{Iw:.5f}" iyy="{Id:.5f}" izz="{Ih:.5f}" ixy="{ixy:.5f}" ixz="{ixz:.5f}" iyz="{iyz:.5f}" />')
# 数値入力を取得する関数
def get_float_input(prompt):
while True:
try:
return float(input(prompt))
except ValueError:
print("無効な入力です. 数字を入力してください.")
# Inertia計算機
selection = "START"
while selection.upper() != "Q":
print("====================")
print("Boxの物体についてURDF用の慣性テンソルを計算します. :")
print("[1] 入力単位 (kg, m) width(x-axis)*depth(y-axis)*height(z-axis)")
print("[2] 入力単位 (g, mm) width(x-axis)*depth(y-axis)*height(z-axis)")
print("[Q] 終了")
selection = input(">>")
if selection == "1":
mass = get_float_input("mass>>")
width = get_float_input("x-axis length (Okuyuki) >>")
depth = get_float_input("y-axis length (YokoHaba)>>")
height = get_float_input("z-axis length (Takasa) >>")
dx = get_float_input("x-axis offset >>")
dy = get_float_input("y-axis offset >>")
dz = get_float_input("z-axis offset >>")
calculate_box_inertia_with_offset(m=mass, w=width, d=depth, h=height, dx=dx, dy=dy, dz=dz)
if selection == "2":
mass = get_float_input("mass>>")*0.001
width = get_float_input("x-axis length (Okuyuki) >>")*0.001
depth = get_float_input("y-axis length (YokoHaba)>>")*0.001
height = get_float_input("z-axis length (Takasa) >>")*0.001
dx = get_float_input("x-axis offset >>")*0.001
dy = get_float_input("y-axis offset >>")*0.001
dz = get_float_input("z-axis offset >>")*0.001
calculate_box_inertia_with_offset(m=mass, w=width, d=depth, h=height, dx=dx, dy=dy, dz=dz)
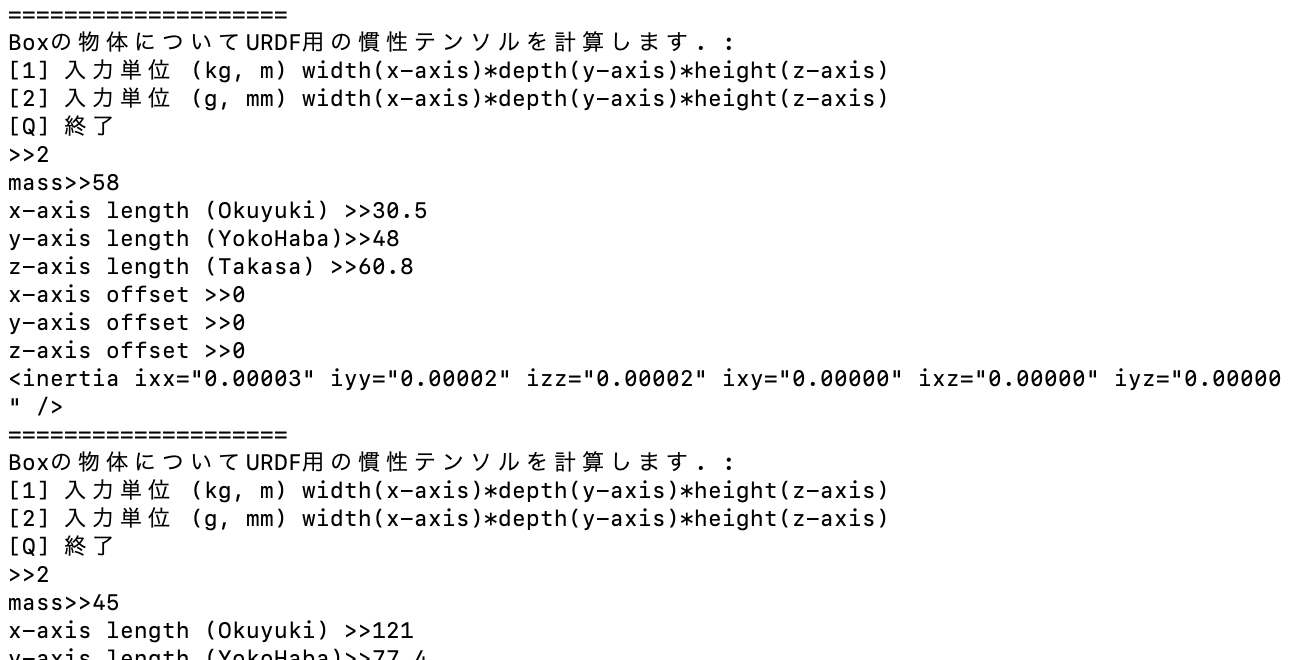
つかいかた・実行結果
python で開いて数値を入力します。
偏心がない場合などはコードを削って使うと便利です。