 何がどこにどう保存されてんのさ
何がどこにどう保存されてんのさ
この記事について
近藤科学のHeartToHeart4(以下HTH4)というホビーロボット用のアプリケーションについて、ファイルの場所、保存方法、挙動などのわかりにくい部分を自分用にまとめてみました。
理解のポイントその1 : ボードの起動時の挙動
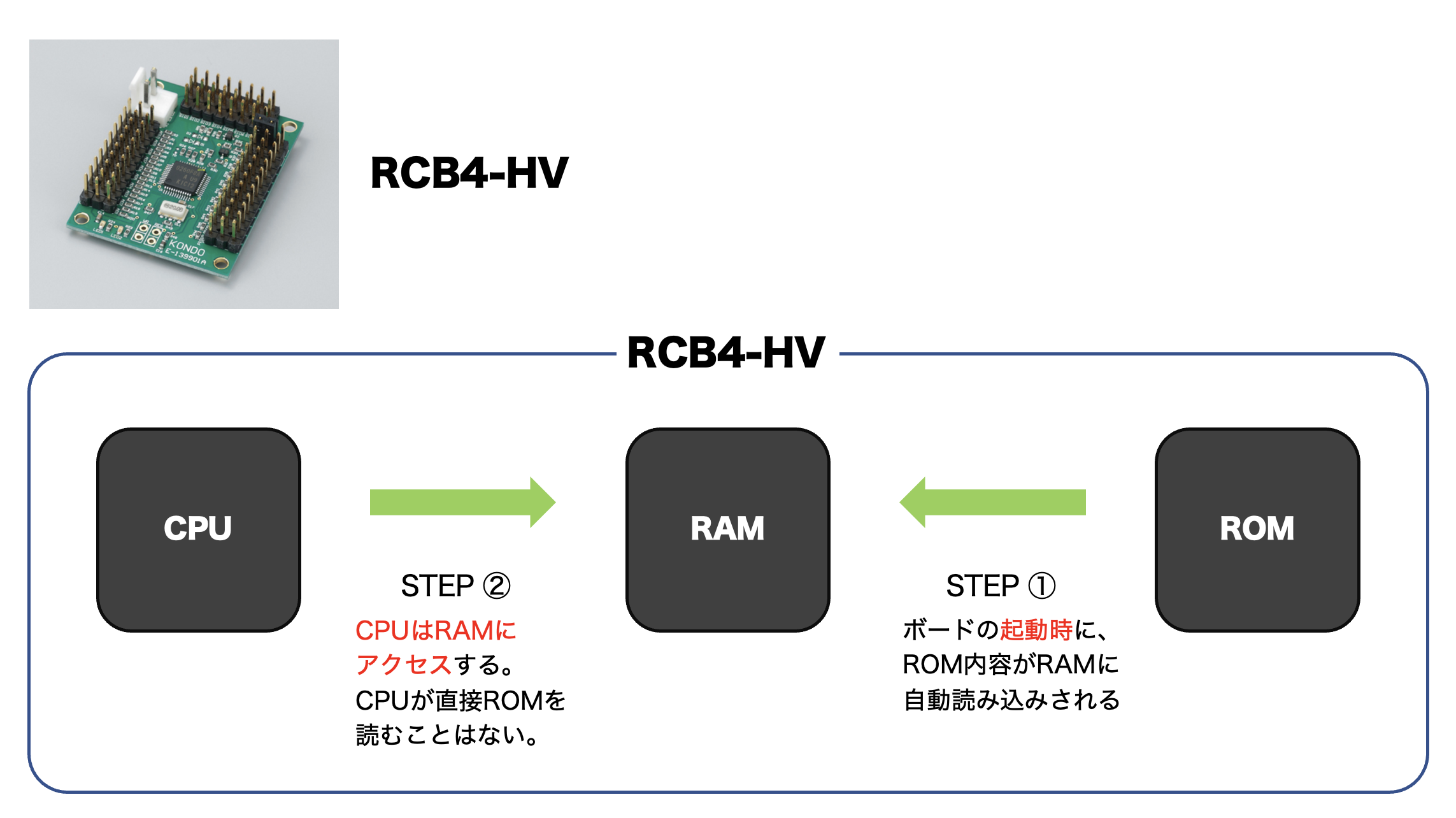 HTH4はRCB-4HVというボードと共に使います。
RCB-4HVが起動時にどういう挙動になるかを知っておくことが理解への近道です。
HTH4はRCB-4HVというボードと共に使います。
RCB-4HVが起動時にどういう挙動になるかを知っておくことが理解への近道です。
ボードは起動時にまず①ROMの内容をRAMに展開します。そして②CPUはRAMの内容にのみアクセスします。
ボードのCPUがROMの内容に直接アクセスすることはないようです。つまりPCからROMの内容を書き換えただけではロボットの挙動には反映されません。
ROMに書き込んだ場合にボードの再起動を促されるのはこのためで、再起動時をすることでROMの内容がRAMに展開され、データがロボットの動きに反映されるようになります。
理解のポイントその2 : ボード読み書きボタンの挙動

設定データのボードへの読み書きは、RAMへの書き込み、RAMからの読み込み、ROMへの書き込みの3通があります。
RAMへの書き込みボタン(>RAM) を押せば、データが即座にロボットの動きに反映されます。ただしRAMに書き込んだだけなので保存はされていません。
[ROMにすべて保存]ボタン を押せばデータをROMに焼くことができます。しかし、データをロボットの動きに反映させるためには前述のようにボードの再起動が必要です。
RAMからの読み込みボタン(<RAM) を押せば、ロボット側が持つ設定データをPCに読み込むことができます。この機能を使えばRCB-4HVからデータを吸い出してPCに保存することが可能です。
理解のポイントその3 : PCに保存されるファイルの種類

プロジェクトで作成されるファイルには、
・プロジェクトファイルである「○○○.h4p」
・トリムデータを格納する「△△△.h4t」
・モーションデータ等を格納する「□□□.xml」
などがあります。
格納場所は(おそらくドキュメントフォルダ内の)[HeartToHeart4]>[project]のフォルダの中になります。
ボードのROM,RAMが絡んでくることもあって、自分が作成したデータの保存場所の見通しが悪い感じがしますが、少し冷静になればなんとか把握できると思います。
理解のポイントその4 : セーブボタンとファイルの対応
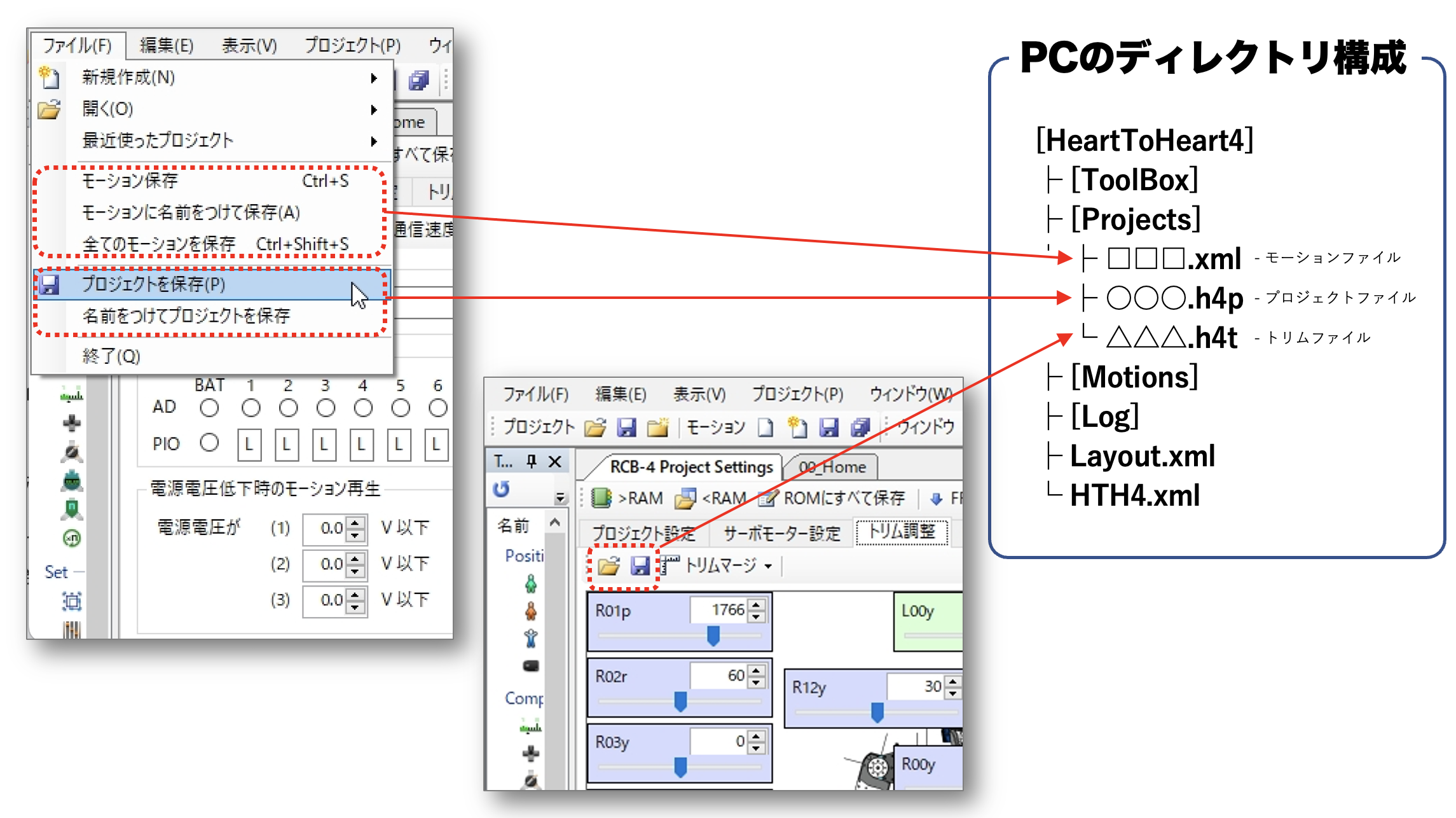
HTH4は至る所にセーブボタンがあり混乱しますが、先ほどのファイルとボタンの関係はこのようになります。
ファイルの実体とセーブボタンの対応をイメージすることで、すっきりと理解できるのではないでしょうか。
理解のポイントその5 : ホームポジションの保存場所
このソフトで出てくる 「ホームポジション」がいったいどこに保存されるのかということですが、PCには保存されません。(ボードには保存されるようです)
ホームポジションを設定するには、Sync状態でモーションの1コマを選んでホームポジションに設定するボタン(赤い丸) を押します。

しかるのち、[ROMにすべて保存]ボタン を押します。ダイアログボックスで起動時の姿勢を問われるので、「ホームポジション」を選択すると、ボードのROMにホームポジションが保存されるようになります。
PC上であらかじめ決めておいたポーズのホームポジションをモーションとして登録しておくのがおすすめです。
おわりに
他にもモーションのリストやリモコンボタンの対応データなど、どこに何が格納されているのかよくわかならない部分もありますが、そちらについては時間があったら調べて更新したいと思います。
また、記事の間違いなどがありましたらぜひご指摘いただければ幸いです。
公式のユーザーマニュアルは以下にあります。