 まずは1個だけでも...
まずは1個だけでも...
やること
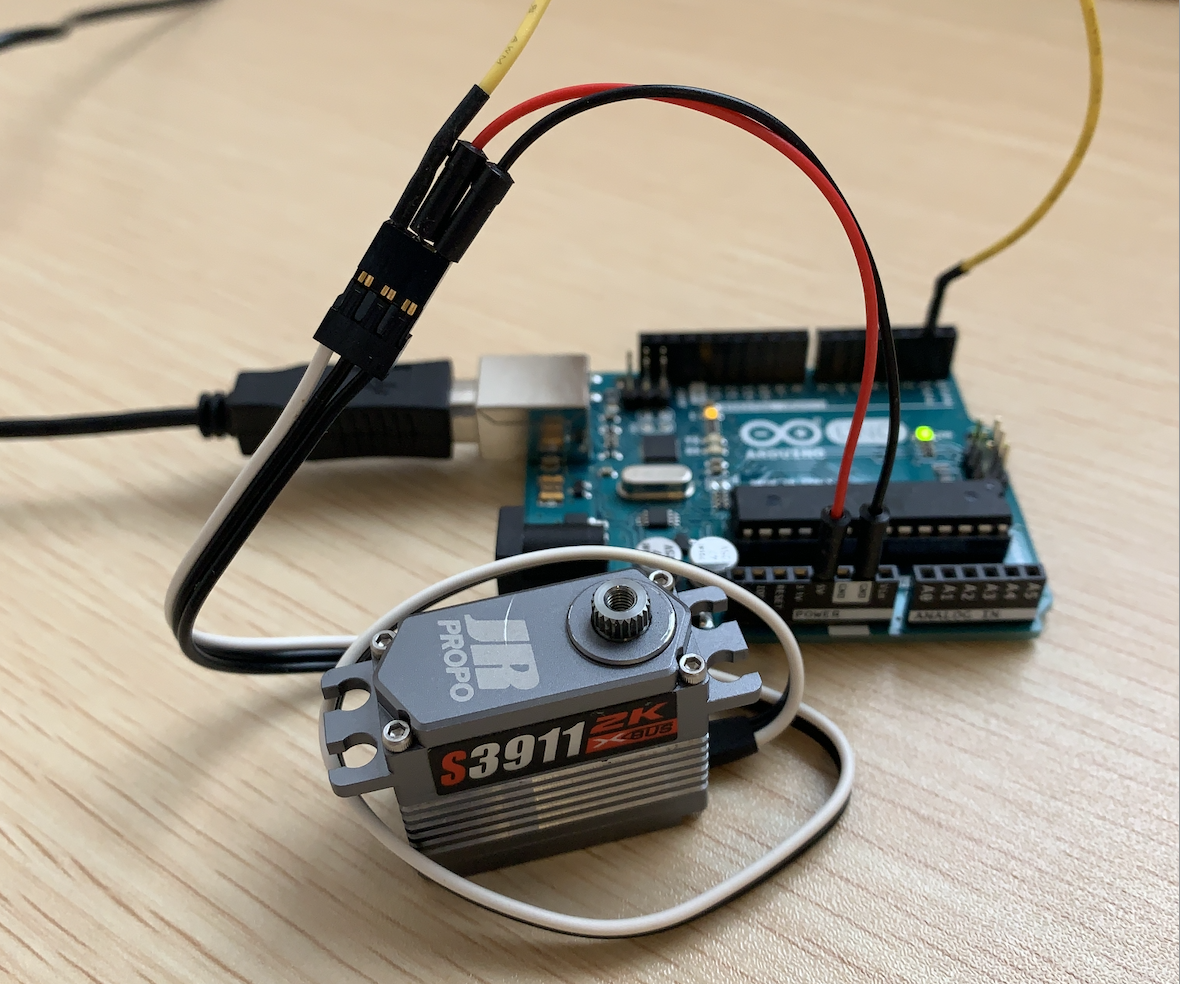
JR PROPOブランドのXBUSServoをシリアルコマンドで動かします。
今回は7.4V用で銀色の小型サーボ「S3911」を使ってみました。
(※メーカー推奨とは言えないテスト方法ですので、実施は自己責任にてお願いします。)
作業環境
- Arduino UNO
- Arduino IDE
- S3911(JR PROPO/RC DEPOT XBUSServo)
ライブラリの導入
RC DEPOTの公式サイトの左側下にある「JR製品取扱説明書」からXBUSServo関連の資料やライブラリをDLすることができます。
今回はArduino等に導入しやすいように階層構造を調整したバージョンをテスト用としてGithubにアップしておきましたので、それを使います。(※転載許諾いただきました。)
STEP 1:
XBUSServo用のライブラリをDLします。
https://github.com/Ninagawa123/XBusServo
緑の「CODE」ボタンからDownload ZIPを選択します。
STEP 2:
ライブラリをインストールします。
Arduino IDE のメニューから「スケッチ」→「ライブラリをインクルード」→「.ZIP形式のライブラリをインストール」を選択し、先ほどDLしたZIPファイル(XBusServo-main.zip)を選択します。

STEP 3:
メニューの「スケッチ」→「ライブラリをインクルード」に「XBusServoLib」が追加されたことを確認します。表示されていれば導入完了です。
サーボとArduinoの動作テスト用簡易接続
今回は動作テストとして、以下の仕様や特性を利用して簡易的に動かします。
テスト接続のポイント
- サーボは5V給電でもギリギリ動く。
- サーボへの送信信号は3.3Vだが5Vでも一応動く。(ただし受信信号は3.3V)
- サーボのラインは、中央の黒線がVcc、外側の黒線がGND、白線が信号線。
- ハードウェアシリアルを使うので、書き込み時はサーボ信号線を外す。
Arduinoとの接続
| サーボ線 | 機能 | Arduino |
|---|---|---|
| 外側の黒線 | GND | GNDピン |
| 中央の黒線 | Vcc | 5Vピン |
| 外側の白線 | 信号線 | 1番ピン(※今はつながない) |
ハードウェアシリアルはPCとArduinoの通信や書き込みに使うので、サーボの信号線はここでは外したままにします。
サンプルコード
下記のコードをコピペしてArduino UNOに書き込みます。
#include <XBusServo.h>
#define kMaxServoNum 1 // XBusサーボの接続数 : 1 - 50
#define kDirPinNum -1 // 送受信切り替えピンの番号. -1 で送信のみ.
XBusServo myXBusServo(kDirPinNum, kMaxServoNum); // ライブラリのインスタンス化
unsigned int servoValue = 32767;// サーボ位置の値. 0x7FFF がXBusServoのサーボ位置の中央値
float radiansval = 0.0; // サインカーブ算出用のラジアン値
float radiansIncrement = 0.03; // ループ毎のラジアン値の増加量
void setup()
{
myXBusServo.begin();
myXBusServo.addServo(0x01, kXbusServoNeutral); // 最初のサーボID. 今回は1番(0x01)のみ.
}
void sendPacket()
{
myXBusServo.sendChannelDataPacket();
}
void loop()
{
// サインカーブ用の値を算出
radiansval += radiansIncrement; //ラジアン値を増加
radiansval = (radiansval > 2 * PI) ? 0 : radiansval; //ラジアン値が2πを超えたら0にリセット
// サーボの値をセットする
servoValue = 32767 + int(sin(radiansval) * 30426); // サーボ位置の上限下限の許容範囲でサイン揺動させる
myXBusServo.setServo(1, servoValue); //サーボ値をセットする
myXBusServo.sendChannelDataPacket(); //データを送信する
delay(10); //10ミリ秒ディレイ. 14ミリ秒以下の必要がある.
}
起動と動作結果
書き込みが終わったら、Arduinoの1番ピンにサーボの信号線を挿します。
1秒間隔ぐらいでサーボが左右に加減速しながら左右に回転すれば実験成功です。
少しだけ細かい話
XBusServoはデフォルト状態では無信号状態が1.5秒続くと脱力する仕様だそうです。今回のスクリプトでは10msごとに信号を送っています。標準的なインターバルは14msとのことです。
信号線は送受信1線式です。受信を行う場合には別途、半二重回路が必要になります。
信号速度は 220,000bps250kbpsです。よく見る115,200bpsの約2倍ですが、ゆえに旧来のArduinoではハードウェアシリアルのみの対応となっています。250kbpsは最近よく使われている通信速度らしいです。
角度の指定については約220度を16ビットで分解しているそうです。開き度合いは別途設定できるようです。
その他、仕様についてはJR製品取扱説明書のXBusServoLibrary.pdf、XbusServoSpec.pdfなどに詳しく書かれています。
今回のライブラリは内部的にArduino標準のハードウェアシリアルの使用を指定しています。ハードウェアシリアルが2つ以上あるArduinoやESP32、Teensyなどの場合はライブラリを修正しSerial1、Serial2などを使えるようにすればPCとのUSB接続と共存できると思います。(あとで対応バージョンのライブラリを作るかもしれません。)
さいごに
また、冒頭にも書きましたが今回はあくまで簡易的な動作テストであり、サーボの本体電源、信号ともに推奨の電圧ではありません。 なるべく早くテストを終了し、推奨の正しい電圧にて運用してください。
よき電子工作ライフを!
つづき
ESP32のSerial2などでも動くようにライブラリを改造しました↓