 ビューワーはどう使う?
ビューワーはどう使う?
やること
前回の続きです。
物理エンジンのMuJoCoを試します。
最終的には以下の内容を理解できるようになりたいです。(いつ)
環境
- Mac M1
前回のリベンジ
前回は、公式のチュートリアルに沿って犬ロボットをMuJoCoに出現させ、立たせたり歩かせたりするデモを確認しました。
しかし、MuJoCoのデスクトップアプリ(MuJoCo.app)を開いた後、使い方がわからず何もできない場面もありました。
今回はそのリベンジとして、コードを書かずにMuJoCoにサンプルのロボットを表示させてみます。
MuJoCoでいろんなモデルを見る方法
改めてMuJoCoアプリをDLする
公式サイトからMuJoCoのアプリをダウンロードします。
現在のバージョンは3.2.6です。
https://github.com/google-deepmind/mujoco/releases
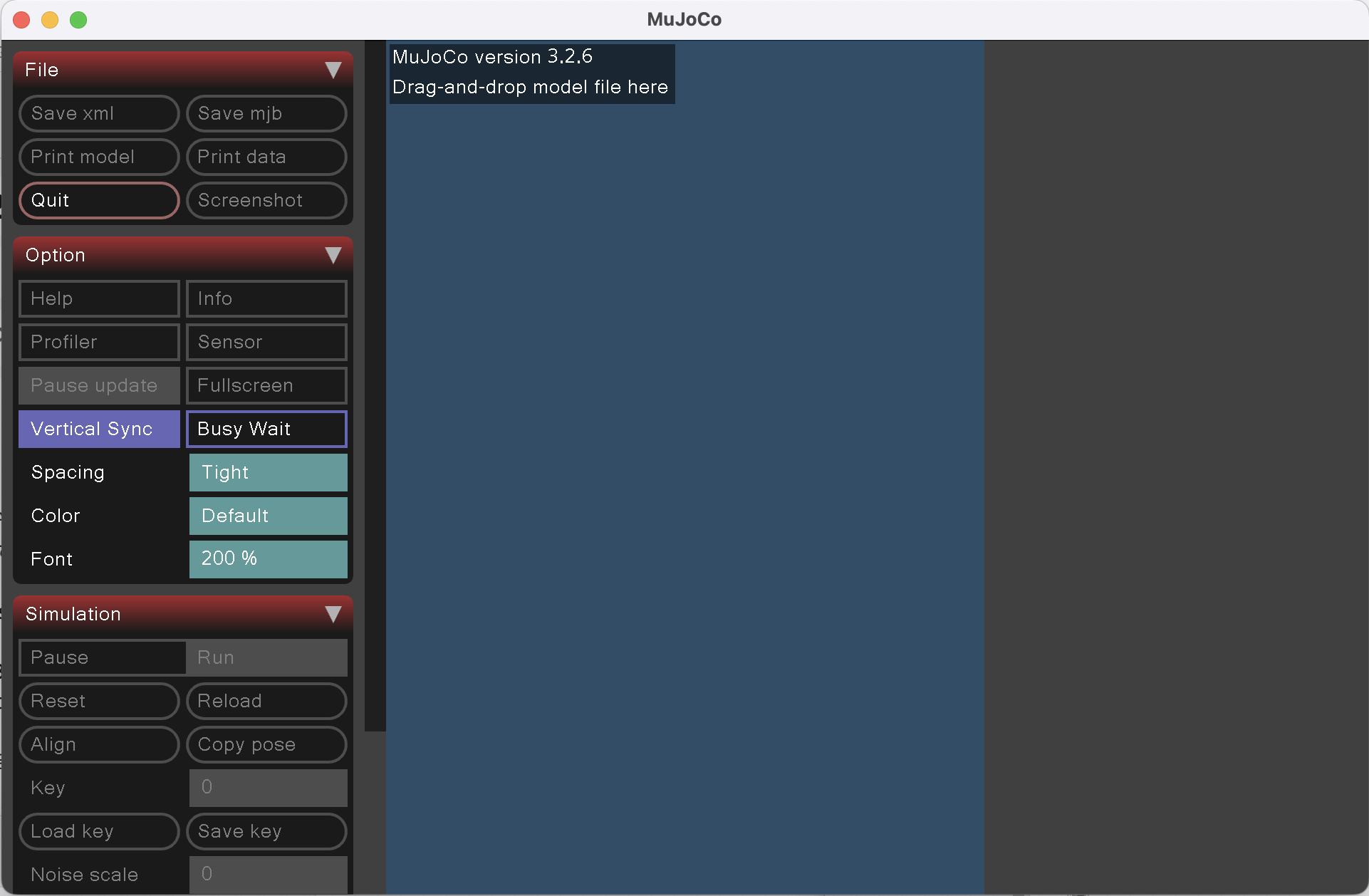
MuJoCoを起動する
MuJoCoを起動して空の画面を出します。
モデルを準備する
MuJoCoに対応したモデルのリストが下記にあるので確認します。
https://mujoco.readthedocs.io/en/stable/models.html
下記より、全モデルを一括DLします。
(codeのボタンからDownload Zip)
https://github.com/google-deepmind/mujoco_menagerie/tree/main
モデルを表示する
解凍して、たとえば「agility_cassie」のフォルダを開きます。
その中にある「scene.xml」をMuJoCoの画面にドロップします。
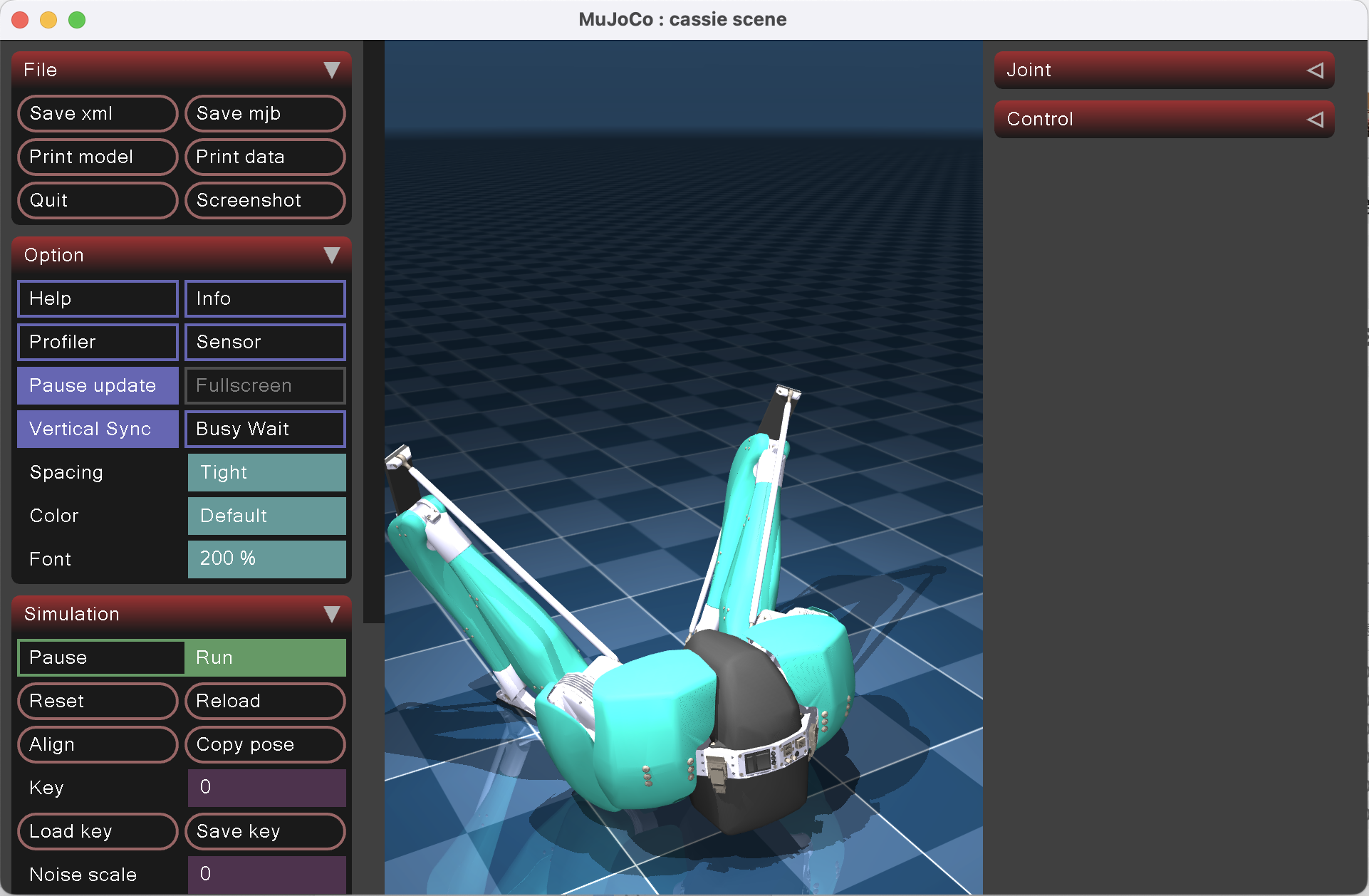
モデルと地面が現れます。
レンダリングがツヤツヤです。
いろんなモデルを表示する
同じ要領で他のscene.xmlも表示できます。

話題のロボットもいます。
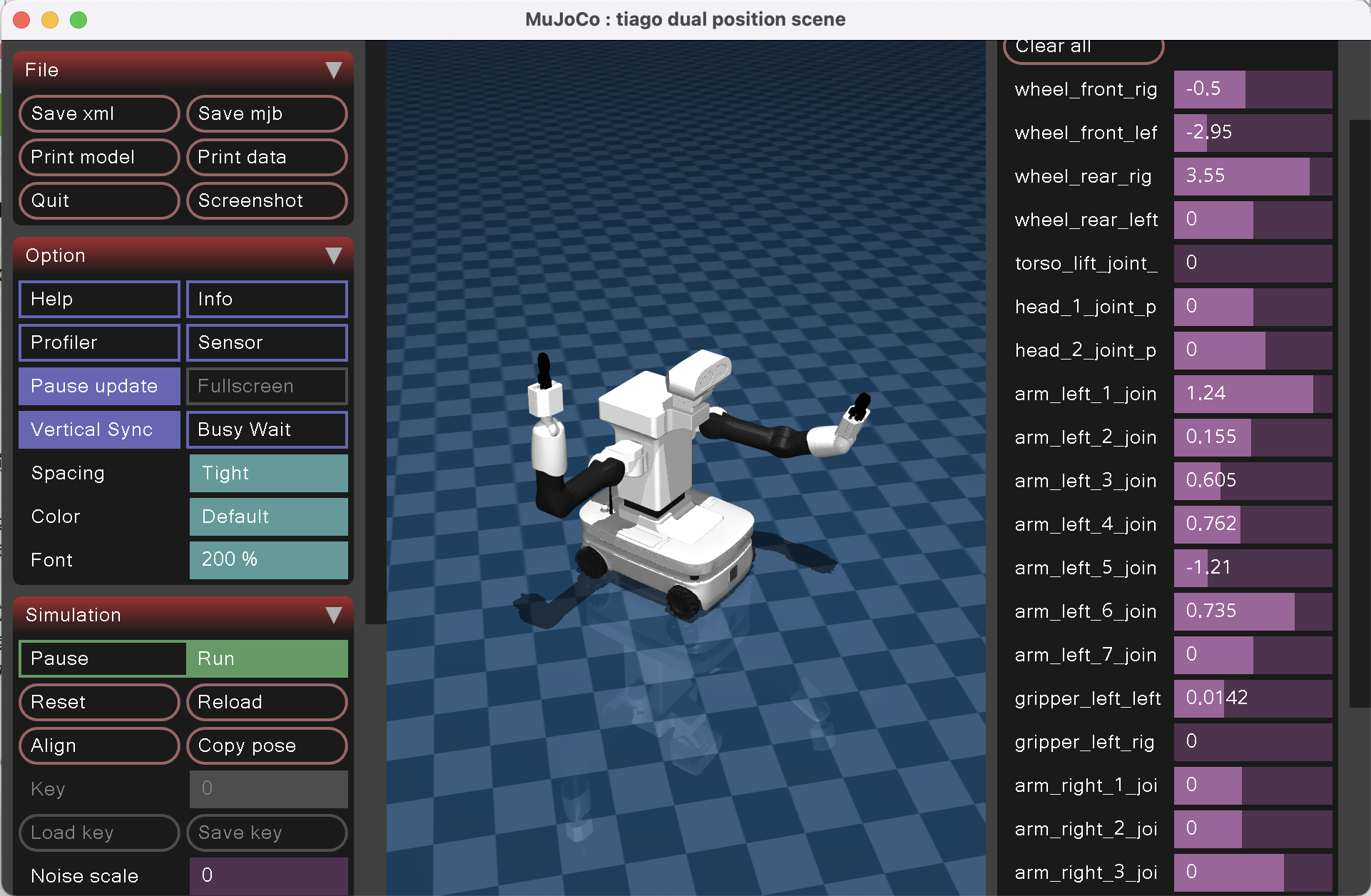
コントロールタブから関節をまげたりもできます。
ロボット図鑑みたいでドロップしていろいろ見るだけでも面白いです。
前回のようなAgentタブやPlannerが左側のメニューにないので、自律的に動いてはくれません。よく調べれば自律プログラムもどこかに入っているかもしれませんがよくわかりません。
つぎにやること
次回はPythonで動かすところを進めたいと思います。
ロボットをコードで動かせる環境に辿り着きたいものです。
前回記事