 まずは一回うごいてけろ
まずは一回うごいてけろ
やりたいこと
CyberGearのDDモーターをArduino Unoで動かしてみます。
準備物
・CyberGear (ダイレクトドライブモーター・工場出荷状態)
・CyberGear用のコネクタ(アリエクで入手可)
・Arduino UNO(Arduino系なら他でも動くと思います)
・CANモジュール(MCP2515搭載, Amazonなどで入手可)
・12V 1.5A程度のDC電源(24VまでOK)
・ジャンパワイヤーいくつか
CyberGearの電源の標準は24Vです。
手元では12V, 1.5Aの電源での動作が確認できました。
9Vや6Vの電源では動作しませんでした。
動作イメージ
配線
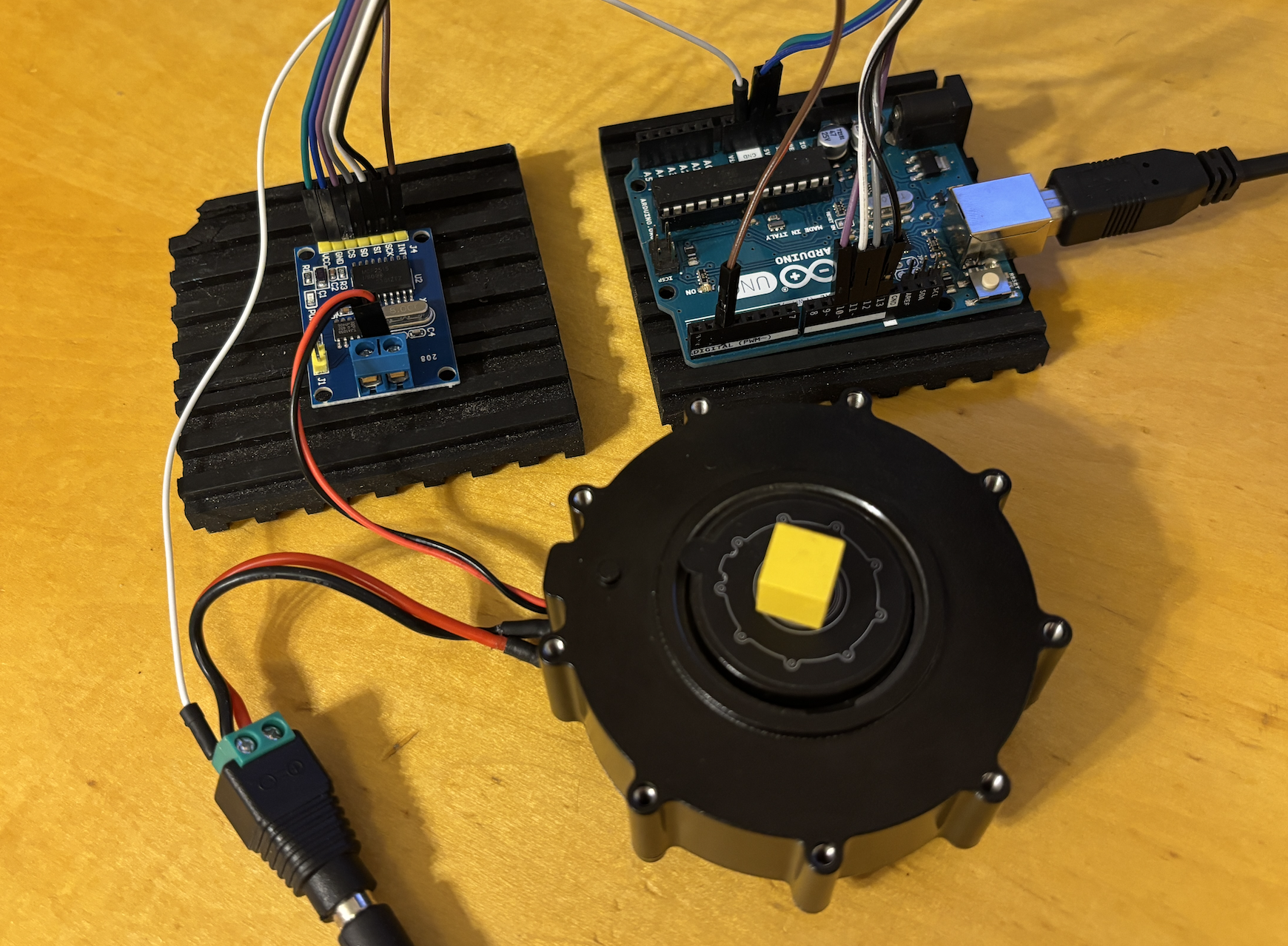
写真と表を参考に配線してください。
| Arduino UNO | CANモジュール (MCP2515ボード) |
説明 |
|---|---|---|
| 5V | VCC | 電源 |
| GND | GND | グランド |
| Pin 10 | CS | チップセレクト |
| Pin 11 | SI (MOSI) | データ送信 |
| Pin 12 | SO (MISO) | データ受信 |
| Pin 13 | SCK | クロック |
| Pin 2 | INT | 割り込み(このコードでは不使用) |
| CyberGear | |
|---|---|
| 太い赤線 | 12V電源等のVCCへ |
| 太い黒線 | 12V電源等のGNDへ |
| 太い黒線(分岐) | ArduinoのGNDへ |
| 細い赤線 | MCP2515ボードのHへ |
| 細い黒線 | MCP2515ボードのLへ |
| Arduino UNO | PC |
|---|---|
| USB | USB |
具体的なコード
sketch_cybergear_test.ino
// CybergearモーターのCAN通信制御
#include <mcp_can.h>
#include <SPI.h>
MCP_CAN CAN(10); // CSピン
// CANコマンド送信: cmd=3(有効化), cmd=18(パラメータ書き込み)
void sendCAN(uint8_t cmd, uint16_t param = 0, float value = 0) {
byte data[8] = {0};
if (cmd == 18) { // パラメータ書き込みコマンド
data[0] = param & 0xFF; // パラメータ下位バイト
data[1] = param >> 8; // パラメータ上位バイト
if (param == 0x7005) data[4] = (uint8_t)value; // モード値をバイトで
else memcpy(&data[4], &value, 4); // 速度値をfloatで
}
// CAN ID形式: [コマンド][マスターID][モーターID] = [cmd][0x00][0x7F]
uint32_t id = ((uint32_t)cmd << 24) | 0x7F;
CAN.sendMsgBuf(id, 1, 8, data);
}
void setup() {
CAN.begin(MCP_ANY, CAN_1000KBPS, MCP_8MHZ); // CAN初期化 1Mbps
CAN.setMode(MCP_NORMAL);
delay(1000);
sendCAN(3); // モーター有効化
delay(100);
sendCAN(18, 0x7005, 2); // 速度制御モード設定 (パラメータ=0x7005, モード=2)
delay(100);
}
void loop() {
// 正弦波速度生成: -5 から +5 rad/s
float speed = 5.0 * sin(millis() / 1000.0 * PI / 2.0);
sendCAN(18, 0x700A, speed); // 速度指令値設定 (パラメータ=0x700A)
delay(50); // 20Hz更新レート
}
これで動くはずです。
サインカーブで揺動すると思います。
まだちょっとコードに無駄があるので、時間のある時にまた調整します。
動作確認は以上となります。
おつかれさまでした!
参考記事
↑ここにあるマニュアルをAIに読み込ませることで、正しく動作するコードを生成しやすくなりました。
↑モジュールやライブラリのインストールの参考になりそうです。
おまけ:AI生成の長めのコード
シリアル通信によるコマンド入力でサーボの操作ができるコードのサンプルを置いておきます。巻末に使い方も記しました。
#include <mcp_can.h>
#include <SPI.h>
// PI定数の定義(Arduino環境で未定義の場合)
#ifndef PI
#define PI 3.14159265359f
#endif
const int SPI_CS_PIN = 10;
MCP_CAN CAN(SPI_CS_PIN);
// CyberGear モータの設定
const uint8_t MOTOR_ID = 0x7F; // モータのID(1-127)
const uint8_t MASTER_ID = 0x00; // マスターID
// CyberGearプロトコルタイプ(マニュアル準拠)
const uint8_t COMM_GET_DEVICE_ID = 0;
const uint8_t COMM_MOTOR_CONTROL = 1;
const uint8_t COMM_MOTOR_FEEDBACK = 2;
const uint8_t COMM_MOTOR_ENABLE = 3;
const uint8_t COMM_MOTOR_DISABLE = 4;
const uint8_t COMM_SET_MECH_ZERO = 6;
const uint8_t COMM_PARAM_WRITE = 18;
// パラメータインデックス(マニュアル準拠)
const uint16_t PARAM_RUN_MODE = 0x7005;
const uint16_t PARAM_IQ_REF = 0x7006;
const uint16_t PARAM_SPD_REF = 0x700A;
const uint16_t PARAM_LIMIT_TORQUE = 0x700B;
const uint16_t PARAM_LOC_REF = 0x7016;
const uint16_t PARAM_LIMIT_SPD = 0x7017;
const uint16_t PARAM_LIMIT_CUR = 0x7018;
const uint16_t PARAM_MECH_POS = 0x7019;
const uint16_t PARAM_IQF = 0x701A;
const uint16_t PARAM_MECH_VEL = 0x701B;
// 制御モード
const uint8_t MODE_MOTION = 0x00;
const uint8_t MODE_POSITION = 0x01;
const uint8_t MODE_SPEED = 0x02;
const uint8_t MODE_CURRENT = 0x03;
// パラメータの範囲(マニュアル準拠)
const float P_MIN = -12.5f;
const float P_MAX = 12.5f;
const float V_MIN = -30.0;
const float V_MAX = 30.0;
const float T_MIN = -12.0;
const float T_MAX = 12.0;
const float KP_MIN = 0.0;
const float KP_MAX = 500.0;
const float KD_MIN = 0.0;
const float KD_MAX = 5.0;
// CAN ID生成関数(マニュアル準拠)
uint32_t make_can_id(uint8_t comm_type, uint16_t data, uint8_t motor_id) {
return ((uint32_t)comm_type << 24) | ((uint32_t)data << 8) | motor_id;
}
// 現在の状態
float current_position = 0.0;
float current_velocity = 0.0;
float current_torque = 0.0;
unsigned long last_command_time = 0;
unsigned long last_status_request = 0;
void setup() {
Serial.begin(115200);
// CAN初期化
if(CAN.begin(MCP_ANY, CAN_1000KBPS, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN: Init OK!");
CAN.setMode(MCP_NORMAL);
} else {
Serial.println("CAN: Init Fail!");
while(1);
}
delay(1000);
// モータを有効化
enableMotor();
delay(100);
// メカニカルゼロ設定
setMechanicalZero();
delay(100);
Serial.println("CyberGear Motor Ready!");
Serial.println("Commands:");
Serial.println("e - Enable motor");
Serial.println("d - Disable motor");
Serial.println("z - Set mechanical zero");
Serial.println("p<value> - Set position (e.g., p1.57)");
Serial.println("v<value> - Set velocity (e.g., v5.0)");
Serial.println("t<value> - Set torque (e.g., t2.0)");
Serial.println("s - Get status");
}
void loop() {
// シリアルコマンド処理
if(Serial.available()) {
String command = Serial.readStringUntil('\n');
command.trim();
processCommand(command);
}
// CANメッセージ受信処理
if(CAN.checkReceive() == CAN_MSGAVAIL) {
unsigned long rxId;
byte len;
byte rxBuf[8];
CAN.readMsgBuf(&rxId, &len, rxBuf);
processCanMessage(rxId, len, rxBuf);
}
// 定期的にステータス要求(1秒間隔)
if(millis() - last_status_request > 1000) {
requestStatus();
last_status_request = millis();
}
}
void processCommand(String cmd) {
if(cmd == "e") {
enableMotor();
} else if(cmd == "d") {
disableMotor();
} else if(cmd == "z") {
setMechanicalZero();
} else if(cmd == "s") {
requestStatus();
} else if(cmd.startsWith("p")) {
float pos = cmd.substring(1).toFloat();
// 位置モードに切り替えて位置制御
setRunMode(MODE_POSITION);
delay(10);
writeParameter(PARAM_LIMIT_SPD, 5.0); // 速度制限
delay(10);
writeParameter(PARAM_LOC_REF, pos); // 位置コマンド
Serial.print("Position set to: ");
Serial.print(pos, 3);
Serial.println(" rad");
} else if(cmd.startsWith("v")) {
float vel = cmd.substring(1).toFloat();
setVelocity(vel, 2.0); // velocity, torque_limit
} else if(cmd.startsWith("t")) {
float torque = cmd.substring(1).toFloat();
setTorque(torque);
} else {
Serial.println("Unknown command");
}
}
void processCanMessage(unsigned long rxId, byte len, byte* data) {
// CyberGearからの応答を処理
uint8_t motor_id = rxId & 0xFF;
uint8_t comm_type = (rxId >> 24) & 0x1F;
if(motor_id == MOTOR_ID) {
switch(comm_type) {
case COMM_MOTOR_FEEDBACK:
if(len == 8) {
// ステータスデータを解析
parseStatusData(data);
}
break;
default:
Serial.print("Received response from motor ");
Serial.print(motor_id);
Serial.print(", comm_type: 0x");
Serial.print(comm_type, HEX);
Serial.print(", data: ");
for(int i = 0; i < len; i++) {
Serial.print(data[i], HEX);
Serial.print(" ");
}
Serial.println();
break;
}
}
}
void parseStatusData(byte* data) {
// CyberGearのステータスデータフォーマットに応じて解析
// (実際のフォーマットはCyberGearの仕様書を参照)
uint16_t pos_raw = (data[1] << 8) | data[0];
uint16_t vel_raw = (data[3] << 8) | data[2];
uint16_t torque_raw = (data[5] << 8) | data[4];
// 生データから実際の値に変換(スケーリング係数は仕様書参照)
current_position = float_from_uint(pos_raw, P_MIN, P_MAX, 16);
current_velocity = float_from_uint(vel_raw, V_MIN, V_MAX, 16);
current_torque = float_from_uint(torque_raw, T_MIN, T_MAX, 16);
Serial.print("Status - Pos: ");
Serial.print(current_position, 3);
Serial.print(" rad, Vel: ");
Serial.print(current_velocity, 3);
Serial.print(" rad/s, Torque: ");
Serial.print(current_torque, 3);
Serial.println(" Nm");
}
void enableMotor() {
byte data[8] = {0};
uint32_t can_id = make_can_id(COMM_MOTOR_ENABLE, MASTER_ID, MOTOR_ID);
if(CAN.sendMsgBuf(can_id, 1, 8, data) == CAN_OK) {
Serial.println("Motor enabled");
} else {
Serial.println("Failed to enable motor");
}
}
void disableMotor() {
byte data[8] = {0};
uint32_t can_id = make_can_id(COMM_MOTOR_DISABLE, MASTER_ID, MOTOR_ID);
if(CAN.sendMsgBuf(can_id, 1, 8, data) == CAN_OK) {
Serial.println("Motor disabled");
} else {
Serial.println("Failed to disable motor");
}
}
void setMechanicalZero() {
byte data[8] = {0};
data[0] = 1; // マニュアル準拠:Byte[0]=1
uint32_t can_id = make_can_id(COMM_SET_MECH_ZERO, MASTER_ID, MOTOR_ID);
if(CAN.sendMsgBuf(can_id, 1, 8, data) == CAN_OK) {
Serial.println("Mechanical zero set");
} else {
Serial.println("Failed to set mechanical zero");
}
}
void setPosition(float pos, float vel, float kp, float kd) {
byte data[8];
// パラメータを制限
pos = constrain(pos, P_MIN, P_MAX);
vel = constrain(vel, V_MIN, V_MAX);
kp = constrain(kp, KP_MIN, KP_MAX);
kd = constrain(kd, KD_MIN, KD_MAX);
// マニュアル準拠のデータパッキング(運動制御モード)
uint16_t pos_raw = uint_from_float(pos, P_MIN, P_MAX, 16);
uint16_t vel_raw = uint_from_float(vel, V_MIN, V_MAX, 16);
uint16_t kp_raw = uint_from_float(kp, KP_MIN, KP_MAX, 16);
uint16_t kd_raw = uint_from_float(kd, KD_MIN, KD_MAX, 16);
data[0] = pos_raw & 0xFF;
data[1] = (pos_raw >> 8) & 0xFF;
data[2] = vel_raw & 0xFF;
data[3] = (vel_raw >> 8) & 0xFF;
data[4] = kp_raw & 0xFF;
data[5] = (kp_raw >> 8) & 0xFF;
data[6] = kd_raw & 0xFF;
data[7] = (kd_raw >> 8) & 0xFF;
// トルクは上位16ビットに配置(マニュアル準拠)
uint16_t torque_raw = uint_from_float(0.0, T_MIN, T_MAX, 16);
uint32_t can_id = make_can_id(COMM_MOTOR_CONTROL, torque_raw, MOTOR_ID);
if(CAN.sendMsgBuf(can_id, 1, 8, data) == CAN_OK) {
Serial.print("Position set to: ");
Serial.print(pos, 3);
Serial.println(" rad");
} else {
Serial.println("Failed to set position");
}
}
// パラメータ書き込み関数
void writeParameter(uint16_t index, float value) {
byte data[8] = {0};
data[0] = index & 0xFF;
data[1] = (index >> 8) & 0xFF;
memcpy(&data[4], &value, 4);
uint32_t can_id = make_can_id(COMM_PARAM_WRITE, MASTER_ID, MOTOR_ID);
CAN.sendMsgBuf(can_id, 1, 8, data);
}
// モード設定関数
void setRunMode(uint8_t mode) {
byte data[8] = {0};
data[0] = PARAM_RUN_MODE & 0xFF;
data[1] = (PARAM_RUN_MODE >> 8) & 0xFF;
data[4] = mode;
uint32_t can_id = make_can_id(COMM_PARAM_WRITE, MASTER_ID, MOTOR_ID);
CAN.sendMsgBuf(can_id, 1, 8, data);
}
void setVelocity(float vel, float torque_limit) {
vel = constrain(vel, V_MIN, V_MAX);
torque_limit = constrain(torque_limit, T_MIN, T_MAX);
// 速度モードに切り替え
setRunMode(MODE_SPEED);
delay(10);
// 電流制限設定
writeParameter(PARAM_LIMIT_CUR, 23.0); // 最大電流制限
delay(10);
// 速度コマンド設定
writeParameter(PARAM_SPD_REF, vel);
Serial.print("Velocity set to: ");
Serial.print(vel, 3);
Serial.println(" rad/s");
}
void setTorque(float torque) {
torque = constrain(torque, T_MIN, T_MAX);
// 電流モードに切り替え
setRunMode(MODE_CURRENT);
delay(10);
// 電流コマンド設定(トルク制御)
writeParameter(PARAM_IQ_REF, torque);
Serial.print("Torque set to: ");
Serial.print(torque, 3);
Serial.println(" Nm");
}
void requestStatus() {
// CyberGearでは定期的なフィードバックが自動で送られてくるため、
// 特別なステータス要求は不要です
// パラメータ読み出しの場合は COMM_PARAM_READ (17) を使用します
}
// ユーティリティ関数:floatを固定小数点に変換(マニュアル準拠)
uint16_t uint_from_float(float x, float x_min, float x_max, int bits) {
float span = x_max - x_min;
if(x > x_max) x = x_max;
else if(x < x_min) x = x_min;
return (uint16_t)((x - x_min) * ((float)((1 << bits) - 1)) / span);
}
// ユーティリティ関数:固定小数点をfloatに変換(マニュアル準拠)
float float_from_uint(uint16_t x_int, float x_min, float x_max, int bits) {
float span = x_max - x_min;
return ((float)x_int) * span / ((float)((1 << bits) - 1)) + x_min;
}
操作コマンド一覧表
基本コマンド
| コマンド | 機能 | 説明 | 例 |
|---|---|---|---|
e |
モーター有効化 | モーターを動作可能状態にする | e |
d |
モーター無効化 | モーターを停止・無効化する | d |
z |
メカニカルゼロ設定 | 現在位置を基準位置(0)に設定 | z |
s |
ステータス取得 | モーターの現在状態を取得 | s |
制御コマンド
| コマンド | 機能 | パラメータ | 範囲 | 説明 | 例 |
|---|---|---|---|---|---|
p<値> |
位置制御 | 目標位置 (rad) | -12.5 ~ 12.5 | 指定位置にモーターを移動 |
p1.57 (90度) |
v<値> |
速度制御 | 目標速度 (rad/s) | -30.0 ~ 30.0 | 指定速度でモーターを回転 | v5.0 |
t<値> |
トルク制御 | 目標トルク (Nm) | -12.0 ~ 12.0 | 指定トルクでモーターを駆動 | t2.0 |
使用例
基本操作
e // モーター有効化
z // 現在位置をゼロ設定
s // ステータス確認
位置制御
p0 // 0度位置に移動
p1.57 // 90度位置に移動 (π/2 rad)
p3.14 // 180度位置に移動 (π rad)
p-1.57 // -90度位置に移動
速度制御
v0 // 停止
v1.0 // 1 rad/s で回転
v5.0 // 5 rad/s で回転
v-2.0 // -2 rad/s で逆回転
トルク制御
t0 // トルク0(フリーラン)
t1.0 // 1 Nm のトルク
t-0.5 // -0.5 Nm の逆方向トルク
停止・終了
d // モーター無効化(安全停止)
ステータス表示
s コマンド実行時の表示例:
Status - Pos: 1.570 rad, Vel: 0.000 rad/s, Torque: 0.150 Nm
- Pos: 現在位置 (rad)
- Vel: 現在速度 (rad/s)
- Torque: 現在トルク (Nm)
制御モードについて(たぶん)
| コマンド | 制御モード | 内部パラメータ |
|---|---|---|
p<値> |
位置制御モード | MODE_POSITION (0x01) |
v<値> |
速度制御モード | MODE_SPEED (0x02) |
t<値> |
電流制御モード | MODE_CURRENT (0x03) |
安全制限
位置制御時の制限
- 速度制限: 5.0 rad/s (自動設定)
- 位置範囲: -12.5 ~ 12.5 rad
速度制御時の制限
- 電流制限: 23.0 A (自動設定)
- 速度範囲: -30.0 ~ 30.0 rad/s
トルク制御時の制限
- トルク範囲: -12.0 ~ 12.0 Nm
シリアル通信設定
- ボーレート: 115200 bps
-
改行コード:
\n(LF) - 文字エンコード: ASCII
注意事項
初期化手順
e // 1. モーター有効化
z // 2. ゼロ位置設定
安全な停止
d // モーター無効化
連続制御
- 位置・速度・トルクコマンドは即座に切り替わります
- 制御モード変更時は少し待機時間があります
エラー時の対応 - 通信エラー時は
dで無効化してからeで再有効化 - 範囲外の値は自動的に制限されます