加速度センサーの値が静止していると1Gを示します。
その時の加速度センサーの値を(x,y,z)として、重力のみを検出しているときに、センサーがどの角度に傾いているのか計算してみたいと思います。その前提として、加速度センサーの絶対値 aが、1のときであることを前提としています。
すなわち a = √(x^2+y^2+z^2) = 1G=9.8m/sのことです。
- a = √(x^2+y^2+z^2)
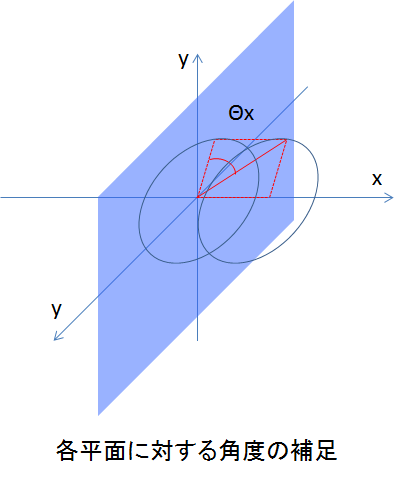
- Θx = atan(x /√(y^2+z^2)) * 180 / 3.14
- Θy = atan(y /√(x^2+z^2)) * 180 / 3.14
- Θz = atan(z /√(x^2+y^2)) * 180 / 3.14
この計算では、空間を次の方法で表現しています。
- aは、加速度の絶対値
- ΘxはYZ平面に対する角度
- Θyの角度はZX平面に対する角度
- Θx軸の角度はXY平面に対する角度
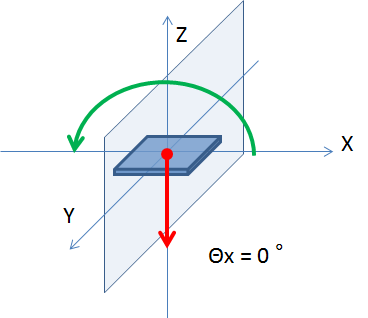


この計算式を使って基板の角度を計算すると、重力が向いている方向を知ることが出来ます。