紹介する論文
論文の要約
- 自動運転のための安全を確保した動作計画(経路選択)法を提案する
- 周囲の障害物(他車など)が最も走行しそうな経路に加え,物理的に走行可能な領域まで計算する
- 自車が走行すべき経路に加え,周囲の障害物が走行可能な領域を外した地点にフェールセーフ経路を計画しておく
- 周囲障害物が交通ルールを無視するなどして衝突しそうな危険が発生した場合には,フェールセーフ経路に舵を切ることで安全を確保する
はじめに
自律移動ロボットや自動車のための経路・動作計画は,非常にポピュラーな研究トピックの1つであり,これまでにも多くの研究が行われています.しかしながら「その安全性をどのように保証するか?」という問いに対する答えは,未だに未解決であるように思います(個人的に).本論文では,オンラインの経路計画に加え,フェールセーフ経路計画まで行い,もし周囲の障害物と衝突の可能性がある場合には,フェールセーフ経路に舵を切ることで安全を確保する方法を提案しています.
なお本論文はワークショップの論文なので,詳細な数式やアルゴリズムが記載されていません.
手法の概要
大きく分けて2段階で構成されます.
到達可能領域の解析(reachability analysis)
まず周囲の障害物(他車など)が最も走行する可能性が高い経路(most likely trajectory)を計算します.これに加え,障害物が物理的に行うことが可能な行動(feasible behavior)や計測の不確かさやになども考慮して,到達可能な領域を計算します.「物理的に行うことが可能な行動」を考慮しているので,交通ルールに従わないような行動までも考慮されています.
フェールセーフ経路の計算
フェールセーフ経路は,自車の目標経路から枝分かれした経路です.このフェールセーフ経路は,周囲の障害物が到着可能な経路までを考慮したものなので,衝突しない安全な経路であるといえます.下図(論文中図1)に,フェールセーフ経路の例が示されています.
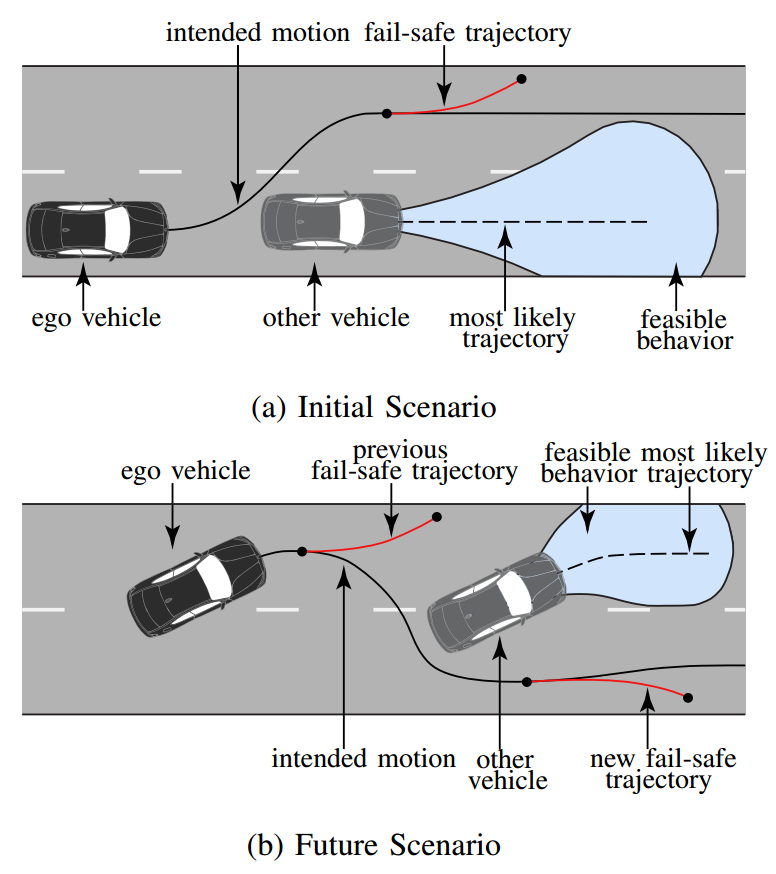
もし障害物と衝突しそうな場合には,(1)フェールセーフ経路に従い走行する,(2)新たな目標経路とフェールセーフ経路の組を探索する,2つの戦略を取ることで,衝突回避を実現し,安全を確保します.
シミュレーションによる検証
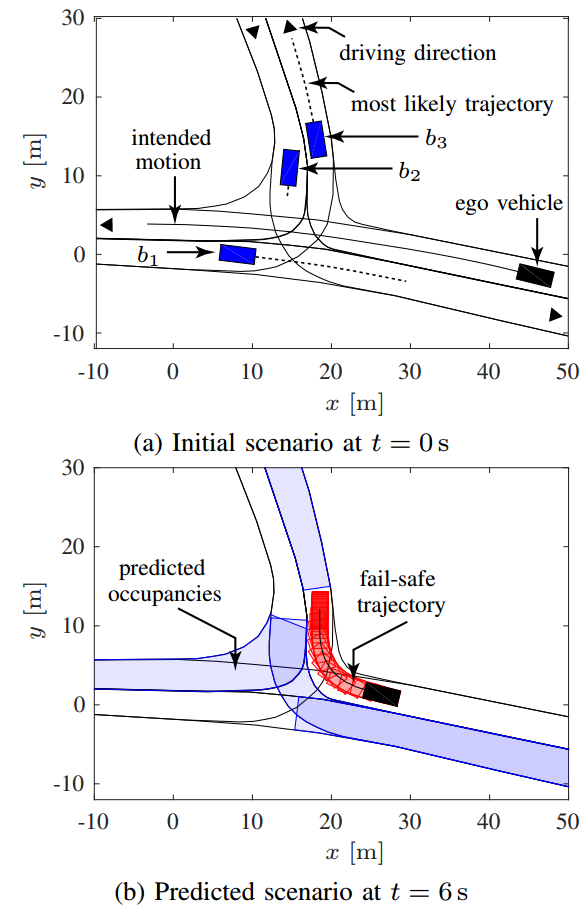
下図(論文中図2)に,シミュレーションの結果が示されています.3台の他車($b1$,$b2$,$b3$)が存在する中で,それぞれの物理的に到達できる経路を計算しています.なおこの状況では,直進する自車が優先となっています.しかし実験では,$b2$が自車を見落としたと仮定し,T字路を自車より先に左折しようとします.ここで自車はフェールセーフ経路を計算しているので,衝突を回避することができています.なお自車は,6秒先の衝突までを予測しているとのことです.
感想
経路・動作計画のほとんどの問題は,コスト関数などの最適化などで定式化されます.そのため,どのようにコスト関数を設計するかが,手法の性能を左右します.その中で,「安全を保証するコスト関数」と言われると,中々定義が難しくなりますが,それとは別に明示的にフェールセーフ経路を計算しておく,とすると,シンプルですが確かに効果的であるなと思いました.