これはメモです。
ArduinoのAdafruit BNO055のライブラリのread_all_data.inoを移植
はじめに
組み合わせ
M5StickC Plus (不安定でした。)
M5Stack Core2
秋月のBN055 https://akizukidenshi.com/catalog/g/gK-16996/
PullUP抵抗を付けないと動作不安定かも?(秋月のQ&A参照)
(4.7kΩtつけても不安定。。。。<--M5StickC Plus使用時)
https://learn.adafruit.com/adafruit-bno055-absolute-orientation-sensor/overview
によると、実装にも問題があるとのこと?
BNO055 I2C インプリメンテーションは、状況によっては I2C プロトコルに違反します。これにより、特定のチップファミリではうまく機能しません。Espressif ESP32、ESP32-S3、およびNXP i.MX RT1011ではうまく機能せず、I2Cマルチプレクサではうまく機能しません。SAMD51、RP2040、STM32F4、およびnRF52840での動作の信頼性が向上します。
Node-RED MCUのI2CIn
- msg.addressがあればそれを優先、ない時にI2CInのプロパティのアドレスを利用し、msg.addressで出力。
- I2CInのプロパティのComanndがあればそれを、なければmsg.commandを実行します。出力のmsg.commandには使用した方が入ります。
- 結果はmsg.payloadにUint8Array()で出力されます。
Node-RED MCUのI2COut
- msg.addressがあればそれを優先、ない時にI2CInのプロパティのアドレスを利用し、msg.addressで出力。
- コマンドは次の順で実行(どちらか)
1. I2CInのプロパティのComannd
2. I2CInのプロパティのpayload
BNO055について
- Address 40(0x28)
- Speed 400kHz (p.91) 50kHzのサンプルもあり
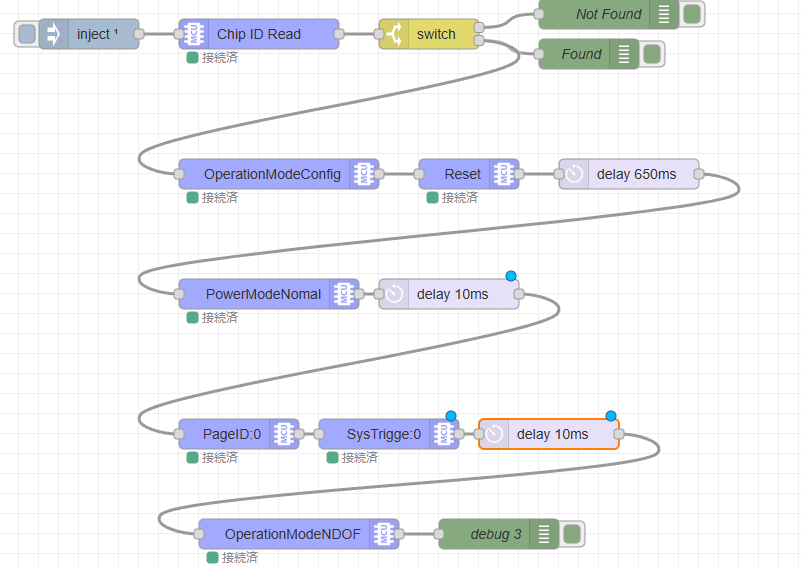
初期化部分
1.MCU 起動後 0.1秒後に起動(Injection)
2.setMode(OPERATION_MODE_CONFIG); //write8(BNO055_OPR_MODE_ADDR(0x3d:61), _mode(0x00:0));
3.write8(BNO055_SYS_TRIGGER_ADDR(0x3f:63), 0x20:32); //System Reset
4.Delay(600ms) 再起動に必要な時間 400msでは足りなかった。
本当は
/* Delay incrased to 30ms due to power issues https://tinyurl.com/y375z699 */
delay(30);
while (read8(BNO055_CHIP_ID_ADDR) != BNO055_ID) {
delay(10);
}
delay(50);
5.write8(BNO055_PWR_MODE_ADDR(0x3e:62), POWER_MODE_NORMAL(0x00:0)); // Set to normal power mode
6.delay(10);
7.write8(BNO055_PAGE_ID_ADDR(0x07:7), 0);
8.write8(BNO055_SYS_TRIGGER_ADDR(0x3f:63), 0x0);
9.delay(10);
10.setMode(mode);//defalt=OPERATION_MODE_NDOF
//write8(BNO055_OPR_MODE_ADDR(0x3d), OPERATION_MODE_NDOF(0x0c));
11.delay(20); //実際には要らない
確認用
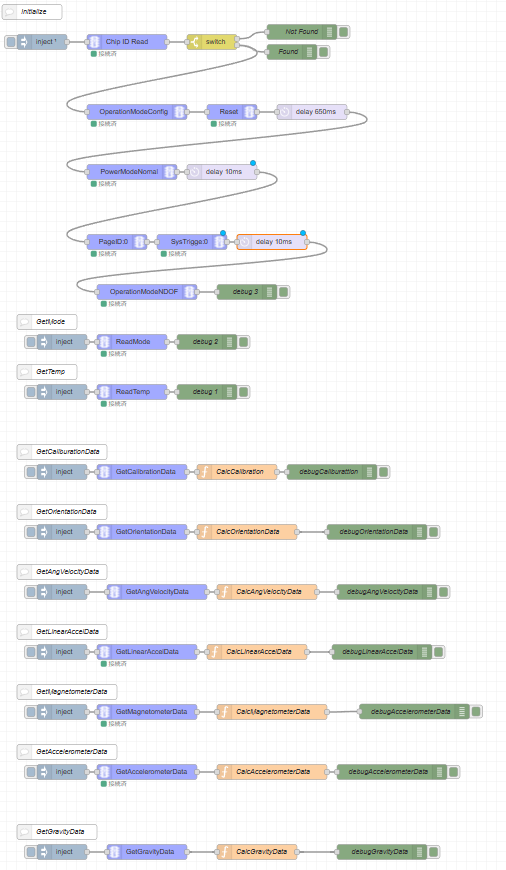
GetMode
14が返ってくれば、OPERATION_MODE_NDOF

データ収集部分
温度 (0x34:52)
温度は、チップ内なので高めですね。
キャリブレーションData(0x35:53)
OrientationData(0X1A:26)
VECTOR_EULER = BNO055_EULER_H_LSB_ADDR,
/* Euler data registers */
BNO055_EULER_H_LSB_ADDR = 0X1A(26),
BNO055_EULER_H_MSB_ADDR = 0X1B(27),
BNO055_EULER_R_LSB_ADDR = 0X1C(28),
BNO055_EULER_R_MSB_ADDR = 0X1D(29),
BNO055_EULER_P_LSB_ADDR = 0X1E(30),
BNO055_EULER_P_MSB_ADDR = 0X1F(31),
/* 1 degree = 16 LSB */
xyz[0] = ((double)x) / 16.0;
xyz[1] = ((double)y) / 16.0;
xyz[2] = ((double)z) / 16.0;
angVelocityData(0X14:20)
VECTOR_GYROSCOPE = BNO055_GYRO_DATA_X_LSB_ADDR,
/* Gyro data registers */
BNO055_GYRO_DATA_X_LSB_ADDR = 0X14(20),
BNO055_GYRO_DATA_X_MSB_ADDR = 0X15(21),
BNO055_GYRO_DATA_Y_LSB_ADDR = 0X16(22),
BNO055_GYRO_DATA_Y_MSB_ADDR = 0X17(23),
BNO055_GYRO_DATA_Z_LSB_ADDR = 0X18(24),
BNO055_GYRO_DATA_Z_MSB_ADDR = 0X19(25),
/* 1dps = 16 LSB */
xyz[0] = ((double)x) / 16.0;
xyz[1] = ((double)y) / 16.0;
xyz[2] = ((double)z) / 16.0;
linearAccelData(0X28:40)
VECTOR_LINEARACCEL = BNO055_LINEAR_ACCEL_DATA_X_LSB_ADDR,
/* Linear acceleration data registers */
BNO055_LINEAR_ACCEL_DATA_X_LSB_ADDR = 0X28(40),
BNO055_LINEAR_ACCEL_DATA_X_MSB_ADDR = 0X29(41),
BNO055_LINEAR_ACCEL_DATA_Y_LSB_ADDR = 0X2A(42),
BNO055_LINEAR_ACCEL_DATA_Y_MSB_ADDR = 0X2B(43),
BNO055_LINEAR_ACCEL_DATA_Z_LSB_ADDR = 0X2C(44),
BNO055_LINEAR_ACCEL_DATA_Z_MSB_ADDR = 0X2D(45),
/* 1m/s^2 = 100 LSB */
xyz[0] = ((double)x) / 100.0;
xyz[1] = ((double)y) / 100.0;
xyz[2] = ((double)z) / 100.0;
magnetometerData(0X0E:14)
VECTOR_MAGNETOMETER = BNO055_MAG_DATA_X_LSB_ADDR,
/* Mag data register */
BNO055_MAG_DATA_X_LSB_ADDR = 0X0E(14),
BNO055_MAG_DATA_X_MSB_ADDR = 0X0F(15),
BNO055_MAG_DATA_Y_LSB_ADDR = 0X10(16),
BNO055_MAG_DATA_Y_MSB_ADDR = 0X11(17),
BNO055_MAG_DATA_Z_LSB_ADDR = 0X12(18),
BNO055_MAG_DATA_Z_MSB_ADDR = 0X13(19),
/* 1uT = 16 LSB */
xyz[0] = ((double)x) / 16.0;
xyz[1] = ((double)y) / 16.0;
xyz[2] = ((double)z) / 16.0;
accelerometerData(0X08:08)
VECTOR_ACCELEROMETER = BNO055_ACCEL_DATA_X_LSB_ADDR,
/* Accel data register */
BNO055_ACCEL_DATA_X_LSB_ADDR = 0X08(08),
BNO055_ACCEL_DATA_X_MSB_ADDR = 0X09(09),
BNO055_ACCEL_DATA_Y_LSB_ADDR = 0X0A(10),
BNO055_ACCEL_DATA_Y_MSB_ADDR = 0X0B(11),
BNO055_ACCEL_DATA_Z_LSB_ADDR = 0X0C(12),
BNO055_ACCEL_DATA_Z_MSB_ADDR = 0X0D(13),
/* 1m/s^2 = 100 LSB */
xyz[0] = ((double)x) / 100.0;
xyz[1] = ((double)y) / 100.0;
xyz[2] = ((double)z) / 100.0;
gravityData(0X2E:46)
VECTOR_GRAVITY = BNO055_GRAVITY_DATA_X_LSB_ADDR
/* Gravity data registers */
BNO055_GRAVITY_DATA_X_LSB_ADDR = 0X2E(46),
BNO055_GRAVITY_DATA_X_MSB_ADDR = 0X2F(47),
BNO055_GRAVITY_DATA_Y_LSB_ADDR = 0X30(48),
BNO055_GRAVITY_DATA_Y_MSB_ADDR = 0X31(49),
BNO055_GRAVITY_DATA_Z_LSB_ADDR = 0X32(50),
BNO055_GRAVITY_DATA_Z_MSB_ADDR = 0X33(51),
/* 1m/s^2 = 100 LSB */
xyz[0] = ((double)x) / 100.0;
xyz[1] = ((double)y) / 100.0;
xyz[2] = ((double)z) / 100.0;
未使用(保留)
/* Quaternion data registers */ BNO055_QUATERNION_DATA_W_LSB_ADDR = 0X20,
BNO055_QUATERNION_DATA_W_MSB_ADDR = 0X21,
BNO055_QUATERNION_DATA_X_LSB_ADDR = 0X22,
BNO055_QUATERNION_DATA_X_MSB_ADDR = 0X23,
BNO055_QUATERNION_DATA_Y_LSB_ADDR = 0X24,
BNO055_QUATERNION_DATA_Y_MSB_ADDR = 0X25,
BNO055_QUATERNION_DATA_Z_LSB_ADDR = 0X26,
BNO055_QUATERNION_DATA_Z_MSB_ADDR = 0X27,
フロー
[
{
"id": "38ae423eee7f1136",
"type": "tab",
"label": "BNO055",
"disabled": false,
"info": "",
"env": [],
"_mcu": {
"mcu": true
}
},
{
"id": "652addc0c5307be8",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": true,
"onceDelay": "0.1",
"topic": "",
"_mcu": {
"mcu": true
},
"x": 90,
"y": 100,
"wires": [
[
"be6e4d4742b263a7"
]
]
},
{
"id": "d6599073c13aa157",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "Initialize",
"info": "",
"_mcu": {
"mcu": true
},
"x": 70,
"y": 40,
"wires": []
},
{
"id": "cbca276a5a26f4fd",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "Not Found",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 610,
"y": 80,
"wires": []
},
{
"id": "ce19c3c52e12d654",
"type": "switch",
"z": "38ae423eee7f1136",
"name": "",
"property": "payload",
"propertyType": "msg",
"rules": [
{
"t": "neq",
"v": "160",
"vt": "num"
},
{
"t": "eq",
"v": "160",
"vt": "num"
}
],
"checkall": "true",
"repair": false,
"outputs": 2,
"_mcu": {
"mcu": true
},
"x": 430,
"y": 100,
"wires": [
[
"cbca276a5a26f4fd"
],
[
"0c460a385ab03209",
"1599c89dafcfe0c0"
]
]
},
{
"id": "0c460a385ab03209",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "Found",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 590,
"y": 120,
"wires": []
},
{
"id": "37981dd64e75c6e6",
"type": "delay",
"z": "38ae423eee7f1136",
"name": "",
"pauseType": "delay",
"timeout": "650",
"timeoutUnits": "milliseconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"_mcu": {
"mcu": true
},
"x": 630,
"y": 240,
"wires": [
[
"abc420a10f70ec04"
]
]
},
{
"id": "1232a072885e5227",
"type": "delay",
"z": "38ae423eee7f1136",
"name": "",
"pauseType": "delay",
"timeout": "10",
"timeoutUnits": "milliseconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"_mcu": {
"mcu": true
},
"x": 450,
"y": 360,
"wires": [
[
"783d707f7c1920e0"
]
]
},
{
"id": "c68922330662da2b",
"type": "delay",
"z": "38ae423eee7f1136",
"name": "",
"pauseType": "delay",
"timeout": "10",
"timeoutUnits": "milliseconds",
"rate": "1",
"nbRateUnits": "1",
"rateUnits": "second",
"randomFirst": "1",
"randomLast": "5",
"randomUnits": "seconds",
"drop": false,
"allowrate": false,
"outputs": 1,
"_mcu": {
"mcu": true
},
"x": 550,
"y": 500,
"wires": [
[
"9923e227636827b5"
]
]
},
{
"id": "4d169417dde33296",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetTemp",
"info": "",
"_mcu": {
"mcu": true
},
"x": 100,
"y": 760,
"wires": []
},
{
"id": "12d2b6b4edb55e9d",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "2",
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 800,
"wires": [
[
"09b8caa870bf862f"
]
]
},
{
"id": "a5306f8b07808051",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debug 1",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 420,
"y": 800,
"wires": []
},
{
"id": "2097f2fdda368085",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetMode",
"info": "",
"_mcu": {
"mcu": true
},
"x": 100,
"y": 660,
"wires": []
},
{
"id": "d58259d29075b520",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 700,
"wires": [
[
"45f2fc2ea95f353b"
]
]
},
{
"id": "0396e67fcf522ede",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debug 2",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 420,
"y": 700,
"wires": []
},
{
"id": "6d5e2de480db881a",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debug 3",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 500,
"y": 600,
"wires": []
},
{
"id": "56de770b8d4a2265",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetOrientationData",
"info": "&orientationData, Adafruit_BNO055::VECTOR_EULER",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1040,
"wires": []
},
{
"id": "179f716c476ec73f",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetAngVelocityData",
"info": "&angVelocityData, Adafruit_BNO055::VECTOR_GYROSCOPE",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1160,
"wires": []
},
{
"id": "f86e924c95f2d714",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetLinearAccelData",
"info": "&linearAccelData, Adafruit_BNO055::VECTOR_LINEARACCEL",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1280,
"wires": []
},
{
"id": "789308cd7398b7a9",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetMagnetometerData",
"info": "&magnetometerData, Adafruit_BNO055::VECTOR_MAGNETOMETER",
"_mcu": {
"mcu": true
},
"x": 140,
"y": 1400,
"wires": []
},
{
"id": "6d412de964cdf1ad",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetAccelerometerData",
"info": "&accelerometerData, Adafruit_BNO055::VECTOR_ACCELEROMETER",
"_mcu": {
"mcu": true
},
"x": 140,
"y": 1520,
"wires": []
},
{
"id": "889c49a06e67f72f",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetGravityData",
"info": "&gravityData, Adafruit_BNO055::VECTOR_GRAVITY",
"_mcu": {
"mcu": true
},
"x": 120,
"y": 1680,
"wires": []
},
{
"id": "6fc34c30eb5cf02e",
"type": "comment",
"z": "38ae423eee7f1136",
"name": "GetCaliburationData",
"info": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 920,
"wires": []
},
{
"id": "c046b8825c64cb96",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 960,
"wires": [
[
"287f82bdc2052e37"
]
]
},
{
"id": "6af7c737cf7c0297",
"type": "function",
"z": "38ae423eee7f1136",
"name": "CalcCalibration",
"func": "let val=msg.payload;\n// uint8_t calData = read8(BNO055_CALIB_STAT_ADDR);\n//if (sys != NULL) {\n// * sys = (calData >> 6) & 0x03;\nconst sys = (val>>6) & 3;\n//}\n//if (gyro != NULL) {\n// * gyro = (calData >> 4) & 0x03;\n//}\nconst gyro = (val>>4) & 3;\n//if (accel != NULL) {\n// * accel = (calData >> 2) & 0x03;\n//}\nconst accel = (val>>2) & 3;\n//if (mag != NULL) {\n// * mag = calData & 0x03;\n//}\nconst mag = val & 3;\nmsg.payload.sys = sys;\nmsg.payload.gyro = gyro;\nmsg.payload.accel = accel;\nmsg.payload.mag = mag;\nreturn msg;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"_mcu": {
"mcu": true
},
"x": 480,
"y": 960,
"wires": [
[
"7fc606c07cba9abc"
]
]
},
{
"id": "7fc606c07cba9abc",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debugCaliburattion",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 670,
"y": 960,
"wires": []
},
{
"id": "42afd006c22aa25d",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "2",
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1080,
"wires": [
[
"7d6edcbab0d03dca"
]
]
},
{
"id": "22aa0364a3f8c478",
"type": "function",
"z": "38ae423eee7f1136",
"name": "CalcOrientationData",
"func": "let c1 = new ArrayBuffer(2), x_ui = new Uint16Array(c1), x_i = new Int16Array(c1);\nlet c2 = new ArrayBuffer(2), y_ui = new Uint16Array(c2), y_i = new Int16Array(c2);\nlet c3 = new ArrayBuffer(2), z_ui = new Uint16Array(c3), z_i = new Int16Array(c3);\nx_i[0] = msg.payload[0] + msg.payload[1] * 0x100;\ny_i[0] = msg.payload[2] + msg.payload[3] * 0x100;\nz_i[0] = msg.payload[4] + msg.payload[5] * 0x100;\nlet msg2;\nmsg2 = { payload: { x: x_i[0] / 16.0, y: y_i[0] / 16.0, z: z_i[0] / 16.0 } };\nreturn msg2;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"_mcu": {
"mcu": true
},
"x": 500,
"y": 1080,
"wires": [
[
"c82e1648ced64194"
]
]
},
{
"id": "c82e1648ced64194",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debugOrientationData",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 760,
"y": 1080,
"wires": []
},
{
"id": "aa3b4fe55518f45c",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "2",
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1320,
"wires": [
[
"91f532f86ff44a7d"
]
]
},
{
"id": "521cac2f163b6312",
"type": "function",
"z": "38ae423eee7f1136",
"name": "CalcLinearAccelData",
"func": "let c1 = new ArrayBuffer(2), x_ui = new Uint16Array(c1), x_i = new Int16Array(c1);\nlet c2 = new ArrayBuffer(2), y_ui = new Uint16Array(c2), y_i = new Int16Array(c2);\nlet c3 = new ArrayBuffer(2), z_ui = new Uint16Array(c3), z_i = new Int16Array(c3);\nx_i[0] = msg.payload[0] + msg.payload[1] * 0x100;\ny_i[0] = msg.payload[2] + msg.payload[3] * 0x100;\nz_i[0] = msg.payload[4] + msg.payload[5] * 0x100;\nlet msg2;\nmsg2 = { payload: { x: x_i[0] / 100.0, y: y_i[0] / 100.0, z: z_i[0] / 100.0 } };\nreturn msg2;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"_mcu": {
"mcu": true
},
"x": 520,
"y": 1320,
"wires": [
[
"3fc175c4506b12bd"
]
]
},
{
"id": "3fc175c4506b12bd",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debugLinearAccelData",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 770,
"y": 1320,
"wires": []
},
{
"id": "2cfadafd7cfd73fc",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "2",
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1560,
"wires": [
[
"935fb772208c36d1"
]
]
},
{
"id": "0542be9dae744543",
"type": "function",
"z": "38ae423eee7f1136",
"name": "CalcAccelerometerData",
"func": "let c1 = new ArrayBuffer(2), x_ui = new Uint16Array(c1), x_i = new Int16Array(c1);\nlet c2 = new ArrayBuffer(2), y_ui = new Uint16Array(c2), y_i = new Int16Array(c2);\nlet c3 = new ArrayBuffer(2), z_ui = new Uint16Array(c3), z_i = new Int16Array(c3);\nx_i[0] = msg.payload[0] + msg.payload[1] * 0x100;\ny_i[0] = msg.payload[2] + msg.payload[3] * 0x100;\nz_i[0] = msg.payload[4] + msg.payload[5] * 0x100;\nlet msg2;\nmsg2 = { payload: { x: x_i[0] / 100.0, y: y_i[0] / 100.0, z: z_i[0] / 100.0}};\nreturn msg2;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"_mcu": {
"mcu": true
},
"x": 550,
"y": 1560,
"wires": [
[
"b1d921ad6246d5f7"
]
]
},
{
"id": "b1d921ad6246d5f7",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debugAccelerometerData",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 790,
"y": 1560,
"wires": []
},
{
"id": "91b9994829987545",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "2",
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1720,
"wires": [
[
"79e850af2b58f771"
]
]
},
{
"id": "0a293fa7be3fce78",
"type": "function",
"z": "38ae423eee7f1136",
"name": "CalcGravityData",
"func": "let c1 = new ArrayBuffer(2), x_ui = new Uint16Array(c1), x_i = new Int16Array(c1);\nlet c2 = new ArrayBuffer(2), y_ui = new Uint16Array(c2), y_i = new Int16Array(c2);\nlet c3 = new ArrayBuffer(2), z_ui = new Uint16Array(c3), z_i = new Int16Array(c3);\nx_i[0] = msg.payload[0] + msg.payload[1] * 0x100;\ny_i[0] = msg.payload[2] + msg.payload[3] * 0x100;\nz_i[0] = msg.payload[4] + msg.payload[5] * 0x100;\nlet msg2;\nmsg2 = { payload: { x: x_i[0] / 100.0, y: y_i[0] / 100.0, z: z_i[0] / 100.0}};\nreturn msg2;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"_mcu": {
"mcu": true
},
"x": 520,
"y": 1720,
"wires": [
[
"27bebff5e50f7a26"
]
]
},
{
"id": "27bebff5e50f7a26",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debugGravityData",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 770,
"y": 1720,
"wires": []
},
{
"id": "2d9de493d1284c36",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "2",
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1440,
"wires": [
[
"bd975c8350ca91f1"
]
]
},
{
"id": "1096aa141ac7e0d2",
"type": "function",
"z": "38ae423eee7f1136",
"name": "CalcMagnetometerData",
"func": "let c1 = new ArrayBuffer(2), x_ui = new Uint16Array(c1), x_i = new Int16Array(c1);\nlet c2 = new ArrayBuffer(2), y_ui = new Uint16Array(c2), y_i = new Int16Array(c2);\nlet c3 = new ArrayBuffer(2), z_ui = new Uint16Array(c3), z_i = new Int16Array(c3);\nx_i[0] = msg.payload[0] + msg.payload[1] * 0x100;\ny_i[0] = msg.payload[2] + msg.payload[3] * 0x100;\nz_i[0] = msg.payload[4] + msg.payload[5] * 0x100;\nlet msg2;\nmsg2 = { payload: { x: x_i[0] / 16.0, y: y_i[0] / 16.0, z: z_i[0] / 16.0}};\nreturn msg2;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"_mcu": {
"mcu": true
},
"x": 550,
"y": 1440,
"wires": [
[
"8dc8abc588c20649"
]
]
},
{
"id": "8dc8abc588c20649",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debugAccelerometerData",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 835,
"y": 1439,
"wires": []
},
{
"id": "f8e0462b69699282",
"type": "inject",
"z": "38ae423eee7f1136",
"name": "",
"props": [],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": "2",
"topic": "",
"_mcu": {
"mcu": true
},
"x": 130,
"y": 1200,
"wires": [
[
"e99de7b3c5068eb4"
]
]
},
{
"id": "54f171af68f831e3",
"type": "function",
"z": "38ae423eee7f1136",
"name": "CalcAngVelocityData",
"func": "let c1 = new ArrayBuffer(2), x_ui = new Uint16Array(c1), x_i = new Int16Array(c1);\nlet c2 = new ArrayBuffer(2), y_ui = new Uint16Array(c2), y_i = new Int16Array(c2);\nlet c3 = new ArrayBuffer(2), z_ui = new Uint16Array(c3), z_i = new Int16Array(c3);\nx_i[0] = msg.payload[0] + msg.payload[1] * 0x100;\ny_i[0] = msg.payload[2] + msg.payload[3] * 0x100;\nz_i[0] = msg.payload[4] + msg.payload[5] * 0x100;\nlet msg2;\nmsg2 = { payload: { x: x_i[0] / 16.0, y: y_i[0] / 16.0, z: z_i[0] / 16.0}};\nreturn msg2;",
"outputs": 1,
"noerr": 0,
"initialize": "",
"finalize": "",
"libs": [],
"_mcu": {
"mcu": true
},
"x": 540,
"y": 1200,
"wires": [
[
"403b462f8cf7723e"
]
]
},
{
"id": "403b462f8cf7723e",
"type": "debug",
"z": "38ae423eee7f1136",
"name": "debugAngVelocityData",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "payload",
"targetType": "msg",
"statusVal": "",
"statusType": "auto",
"_mcu": {
"mcu": true
},
"x": 780,
"y": 1200,
"wires": []
},
{
"id": "be6e4d4742b263a7",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "Chip ID Read",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "0",
"bytes": 1,
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 260,
"y": 100,
"wires": [
[
"ce19c3c52e12d654"
]
]
},
{
"id": "1599c89dafcfe0c0",
"type": "mcu_i2c_out",
"z": "38ae423eee7f1136",
"name": "OperationModeConfig",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "61,0",
"bytes": 1,
"payload": "payload",
"payloadType": "msg",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 280,
"y": 240,
"wires": [
[
"975f355fb1e83a0c"
]
]
},
{
"id": "abc420a10f70ec04",
"type": "mcu_i2c_out",
"z": "38ae423eee7f1136",
"name": "PowerModeNomal",
"options": {
"bus": "default",
"hz": "50000",
"address": "0x28"
},
"command": "62,0",
"bytes": 1,
"payload": "payload",
"payloadType": "msg",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 270,
"y": 360,
"wires": [
[
"1232a072885e5227"
]
]
},
{
"id": "975f355fb1e83a0c",
"type": "mcu_i2c_out",
"z": "38ae423eee7f1136",
"name": "Reset",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "63,32",
"bytes": 1,
"payload": "payload",
"payloadType": "msg",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 470,
"y": 240,
"wires": [
[
"37981dd64e75c6e6"
]
]
},
{
"id": "9923e227636827b5",
"type": "mcu_i2c_out",
"z": "38ae423eee7f1136",
"name": "OperationModeNDOF",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "61,12",
"bytes": 1,
"payload": "payload",
"payloadType": "msg",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 300,
"y": 600,
"wires": [
[
"6d5e2de480db881a"
]
]
},
{
"id": "783d707f7c1920e0",
"type": "mcu_i2c_out",
"z": "38ae423eee7f1136",
"name": "PageID:0",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "7,0",
"bytes": 1,
"payload": "payload",
"payloadType": "msg",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 240,
"y": 500,
"wires": [
[
"f46dbc4772fac354"
]
]
},
{
"id": "f46dbc4772fac354",
"type": "mcu_i2c_out",
"z": "38ae423eee7f1136",
"name": "SysTrigge:0",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "63,0",
"bytes": 1,
"payload": "payload",
"payloadType": "msg",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 390,
"y": 500,
"wires": [
[
"c68922330662da2b"
]
]
},
{
"id": "45f2fc2ea95f353b",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "ReadMode",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "61",
"bytes": 1,
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 270,
"y": 700,
"wires": [
[
"0396e67fcf522ede"
]
]
},
{
"id": "09b8caa870bf862f",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "ReadTemp",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "52",
"bytes": 1,
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 270,
"y": 800,
"wires": [
[
"a5306f8b07808051"
]
]
},
{
"id": "287f82bdc2052e37",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "GetCalibrationData",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "53",
"bytes": 1,
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 290,
"y": 960,
"wires": [
[
"6af7c737cf7c0297"
]
]
},
{
"id": "7d6edcbab0d03dca",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "GetOrientationData",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "26",
"bytes": "6",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 290,
"y": 1080,
"wires": [
[
"22aa0364a3f8c478"
]
]
},
{
"id": "e99de7b3c5068eb4",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "GetAngVelocityData",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "20",
"bytes": "6",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 320,
"y": 1200,
"wires": [
[
"54f171af68f831e3"
]
]
},
{
"id": "935fb772208c36d1",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "GetAccelerometerData",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "8",
"bytes": "6",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 300,
"y": 1560,
"wires": [
[
"0542be9dae744543"
]
]
},
{
"id": "91f532f86ff44a7d",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "GetLinearAccelData",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "40",
"bytes": "6",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 300,
"y": 1320,
"wires": [
[
"521cac2f163b6312"
]
]
},
{
"id": "bd975c8350ca91f1",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "GetMagnetometerData",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "14",
"bytes": "6",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 300,
"y": 1440,
"wires": [
[
"1096aa141ac7e0d2"
]
]
},
{
"id": "79e850af2b58f771",
"type": "mcu_i2c_in",
"z": "38ae423eee7f1136",
"name": "GetGravityData",
"options": {
"bus": "default",
"hz": "100000",
"address": "0x28"
},
"command": "46",
"bytes": "6",
"moddable_manifest": {
"include": "$(NODEREDMCU)/nodes/mcu/i2c/manifest.json"
},
"_mcu": {
"mcu": true
},
"x": 300,
"y": 1720,
"wires": [
[
"0a293fa7be3fce78"
]
]
}
]