概要
rivizとは
rvizとはROS2付属の可視化ツールです。gazeboがシミュレーターであり、現実でのロボットの挙動を再現することに重きをおいている一方で、rvizは特定のトピックにフォーカスした可視化を行うことができますー例えばLiDARから得られた障害物の位置を表示したり、ロボットの向きやジョイントの位置関係のみを表示したりなどです。さらに、slam toolboxやnavigation2などの有用なツールがrvizの使用を前提に作られており、これらのツールを使えるようになるという意味でもrvizを習得することは有意義です。
この記事の内容
この記事ではrvizはじめましての人を想定して、rvizの基本的な使い方を説明します。簡単ににrvizの機能を体験するために、本記事では前回作成したロボットを少し改良して用います。ただし、gazebo公式ドキュメントと重複する内容は基本的に書きませんーその都度公式ドキュメントへのリンクを貼ります。また、本記事を完了して実際に自分自身の開発を始める前に、公式ドキュメントに目を通しておくことー少なくとも目次を見て、何が書いてあるのかを何となく把握しておくこと、を強く推奨します。
この記事で扱った内容を実装したコードは私のgithubに公開しています。今回の内容に相当する部分はリンク先のレポジトリのgz_ws/src/nav_devに収められています。
また、記事の内容に誤りや不備等ございましたら、ご指摘いただけると幸いです。
注意事項
扱うロボットのモデルがurdf形式で書かれておらず、gazeboの標準機能でsdf形式をトレースして使う場合はいくつか変換できないsdfの記法があることに注意が必要です。確認した限り、以下のものは変換できません。
- CADファイルの読み込み:故に、ロボットのモデルをrvizで表示することはできなくなります
- ball形式のジョイント:ball形式のジョイントはtfに反映されません
- sensorタグ:センサーのついているリンクは(正しく書かれている限り)動作するので、それほど問題にはなりません
残念ながら2023/12/3現在、rviz2ーROS2を意識する場合はこのように呼ぶ、に関するまとまったドキュメントは整理されていないようです。ROS1時代のドキュメントはありますが、ROS1を使ったことがある人でないと理解は難しいでしょう。但し、ROS2のドキュメントには僅かですがrviz2に関連する記述があります。また、ROSのバージョンに依存しない簡単なユーザーガイドも発見できました。
動作環境・バージョン
動作環境
Ubuntu22.04 :デュアルブートした実機PC
VScode :コーディングとターミナルの操作は基本的にVScodeで行った
バージョン
ROS2 : humble
gazebo : ignition fortless :ROS2公式がhumbleとの連携相手として推奨するバージョン
前提条件
以下のような読者を想定して記事を執筆しました
・上記の動作環境またはそれと同等の機能を持つ環境を有すること
・ 基本的なubuntuの操作が理解できること
・ROS2についての基本的な知識があること
・gazeboの基本的な知識があること
コンテンツ
rvizとの連携の準備をする
LiDARの取り付け
rvizではセンサーデータを取得してそれを可視化することができます。これは特にLiDARなどのフィーバックを人間が読み取ることの難しいセンサーを用いた開発において威力を発揮します。ですが先ず、LiDARデータをpublishしてくれるロボットが必要です。前回作成したロボットモデルにLiDARを取り付け、gazeboからLiDARデータがpublishされるようにしましょう。
sensorタグの扱いについてはgazebo公式チュートリアルを参考にして下さい。具体的にはロボットに以下のlinkを追加してジョイントを定義すれば完了です。poseタグの値などは、自分が使いたいロボットに合わせて変更して下さいーLIDARから出る光線がロボットの他のパーツに干渉しないように注意して下さい。また、円柱を用いて簡単なLiDARのモデリングを行っていますが、無くても問題ありません。
<!-- LIDAR -->
<link name="base_scan">
<pose>0.15 0 0.06 0 0 0</pose>
<inertial>
<inertia>
<ixx>0.001</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.001</iyy>
<iyz>0</iyz>
<izz>0.001</izz>
</inertia>
<mass>0.114</mass>
</inertial>
<collision name="lidar_sensor_collision">
<geometry>
<cylinder>
<radius>0.02</radius>
<length>0.05</length>
</cylinder>
</geometry>
</collision>
<visual name="lidar_sensor_visual">
<geometry>
<cylinder>
<radius>0.02</radius>
<length>0.05</length>
</cylinder>
</geometry>
<material>
<diffuse> 0.145098039 0.156862745 0.164705882 1</diffuse>
<ambient> 0.145098039 0.156862745 0.164705882 1</ambient>
<specular>0.145098039 0.156862745 0.164705882 1</specular>
</material>
</visual>
<sensor name="gpu_lidar" type="gpu_lidar">
<topic>scan</topic>
<ignition_frame_id>base_scan</ignition_frame_id>
<update_rate>5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>0</min_angle>
<max_angle>6.28</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>20.0</max>
<resolution>0.015000</resolution>
</range>
</ray>
<always_on>true</always_on>
<visualize>true</visualize>
</sensor>
</link>
<joint name="lidar_joint" type="fixed">
<parent>base_link</parent>
<child>base_scan</child>
</joint>
1つだけ、公式チュートリアルも書いてない(2023/12/3)重要なことを説明します。
必ずignition_frame_idを定義して下さい。これの定義はセンサータグ配下で以下のように行います。
<ignition_frame_id>base_scan</ignition_frame_id>
パラメータにはsensorタグが付いているlinkの名前を指定して下さい。これは、tfの出力とセンサーデータの出力を同時に行うときに不可欠な役割を果たします。これを指定していないとtfのフレームとsensorのフレームがずれてしまい、rvizがLiDARデータを認識できなくなります。
さらに、今後のことを考えて以下の修正を加えます。今まではbase_linkが一番上位にあるlinkでしたが、その更に上にbase_footprintと言うlinkを追加します。以下に示すlink構造になるように修正して下さい。
<model name="LidarRobo">
<pose>0 0 0 0 0 0</pose>
<link name="base_footprint"/>
<link name="base_link">
.
.
.
</link>
<joint name="base_joint" type="fixed">
<parent>base_footprint</parent>
<child>base_link</child>
</joint>
これで一旦ロボットのモデルは完成です。modelタグ配下の部分を以下に示します。
model.sdfの確認
<model name="LidarRobo">
<pose>0 0 0 0 0 0</pose>
<link name="base_footprint"/>
<link name="base_link">
<inertial>
<pose>0.1 0 0 0 0 0</pose>
<inertia>
<ixx>4.2111447e-02</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>4.2111447e-02</iyy>
<iyz>0</iyz>
<izz>7.5254874e-02</izz>
</inertia>
<mass>1.3729096e+00</mass>
</inertial>
<collision name="base_collision">
<pose>-0.064 0.08 0.06 0 0 -1.57</pose>
<geometry>
<mesh>
<uri>model://LidarRobo5/meshes/2DRoboPrac.stl</uri>
</mesh>
</geometry>
</collision>
<visual name="base_visual">
<pose>-0.064 0.08 0.06 0 0 -1.57</pose>
<geometry>
<mesh>
<uri>model://LidarRobo5/meshes/2DRoboPrac.dae</uri>
</mesh>
</geometry>
<material>
<diffuse> 0.921568627 0.925490196 0.941176471 1</diffuse>
<ambient> 0.921568627 0.925490196 0.941176471 1</ambient>
<specular>0.921568627 0.925490196 0.941176471 1</specular>
</material>
</visual>
</link>
<joint name="base_joint" type="fixed">
<parent>base_footprint</parent>
<child>base_link</child>
</joint>
<!-- LIDAR -->
<link name="base_scan">
<pose>0.15 0 0.06 0 0 0</pose>
<inertial>
<inertia>
<ixx>0.001</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.001</iyy>
<iyz>0</iyz>
<izz>0.001</izz>
</inertia>
<mass>0.114</mass>
</inertial>
<collision name="lidar_sensor_collision">
<geometry>
<cylinder>
<radius>0.02</radius>
<length>0.05</length>
</cylinder>
</geometry>
</collision>
<visual name="lidar_sensor_visual">
<geometry>
<cylinder>
<radius>0.02</radius>
<length>0.05</length>
</cylinder>
</geometry>
<material>
<diffuse> 0.145098039 0.156862745 0.164705882 1</diffuse>
<ambient> 0.145098039 0.156862745 0.164705882 1</ambient>
<specular>0.145098039 0.156862745 0.164705882 1</specular>
</material>
</visual>
<sensor name="gpu_lidar" type="gpu_lidar">
<topic>scan</topic>
<ignition_frame_id>base_scan</ignition_frame_id>
<update_rate>5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>0</min_angle>
<max_angle>6.28</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>20.0</max>
<resolution>0.015000</resolution>
</range>
</ray>
<always_on>true</always_on>
<visualize>true</visualize>
</sensor>
</link>
<joint name="lidar_joint" type="fixed">
<parent>base_link</parent>
<child>base_scan</child>
</joint>
<!-- Wheel left -->
<link name="wheel_left_link">
<pose>0.0 0.095 0.023 -1.57 0 0</pose>
<inertial>
<inertia>
<ixx>1.1175580e-05</ixx>
<ixy>-4.2369783e-11</ixy>
<ixz>-5.9381719e-09</ixz>
<iyy>1.1192413e-05</iyy>
<iyz>-1.4400107e-11</iyz>
<izz>2.0712558e-05</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="wheel_left_collision">
<geometry>
<cylinder>
<radius>0.033</radius>
<length>0.018</length>
</cylinder>
</geometry>
</collision>
<visual name="wheel_left_visual">
<geometry>
<cylinder>
<radius>0.033</radius>
<length>0.018</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
</link>
<joint name="wheel_left_joint" type="revolute">
<parent>base_link</parent>
<child>wheel_left_link</child>
<axis>
<xyz>0 0 1</xyz>
</axis>
</joint>
<!-- Wheel right -->
<link name="wheel_right_link">
<pose>0.0 -0.095 0.023 -1.57 0 0</pose>
<inertial>
<inertia>
<ixx>1.1175580e-05</ixx>
<ixy>-4.2369783e-11</ixy>
<ixz>-5.9381719e-09</ixz>
<iyy>1.1192413e-05</iyy>
<iyz>-1.4400107e-11</iyz>
<izz>2.0712558e-05</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="wheel_right_collision">
<geometry>
<cylinder>
<radius>0.033</radius>
<length>0.018</length>
</cylinder>
</geometry>
</collision>
<visual name="wheel_right_visual">
<geometry>
<cylinder>
<radius>0.033</radius>
<length>0.018</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
<material>
<diffuse> 0.145098039 0.156862745 0.164705882 1</diffuse>
<ambient> 0.145098039 0.156862745 0.164705882 1</ambient>
<specular>0.145098039 0.156862745 0.164705882 1</specular>
</material>
</visual>
</link>
<joint name="wheel_right_joint" type="revolute">
<parent>base_link</parent>
<child>wheel_right_link</child>
<axis>
<xyz>0 0 1</xyz>
</axis>
</joint>
<link name='caster_back_right_link'>
<pose>0.15 -0.05 -0.004 -1.57 0 0</pose>
<inertial>
<mass>0.001</mass>
<inertia>
<ixx>0.00001</ixx>
<ixy>0.000</ixy>
<ixz>0.000</ixz>
<iyy>0.00001</iyy>
<iyz>0.000</iyz>
<izz>0.00001</izz>
</inertia>
</inertial>
<visual name='caster_back_right_visual'>
<geometry>
<sphere>
<radius>0.005</radius>
</sphere>
</geometry>
<material>
<ambient>0.0 1 0.0 1</ambient>
<diffuse>0.0 1 0.0 1</diffuse>
<specular>0.0 1 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.005</radius>
</sphere>
</geometry>
</collision>
</link>
<joint name='caster_back_right_joint' type='ball'>
<parent>base_link</parent>
<child>caster_back_right_link</child>
</joint>
<link name='caster_back_left_link'>
<pose>0.15 0.05 -0.004 -1.57 0 0</pose>
<inertial>
<mass>0.001</mass>
<inertia>
<ixx>0.00001</ixx>
<ixy>0.000</ixy>
<ixz>0.000</ixz>
<iyy>0.00001</iyy>
<iyz>0.000</iyz>
<izz>0.00001</izz>
</inertia>
</inertial>
<visual name='caster_back_left_visual'>
<geometry>
<sphere>
<radius>0.005</radius>
</sphere>
</geometry>
<material>
<ambient>0.0 1 0.0 1</ambient>
<diffuse>0.0 1 0.0 1</diffuse>
<specular>0.0 1 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.005</radius>
</sphere>
</geometry>
</collision>
</link>
<joint name='caster_back_left_joint' type='ball'>
<parent>base_link</parent>
<child>caster_back_left_link</child>
</joint>
<!-- Differential drive -->
<plugin filename="libignition-gazebo-diff-drive-system.so"
name="ignition::gazebo::systems::DiffDrive">
<left_joint>wheel_left_joint</left_joint>
<right_joint>wheel_right_joint</right_joint>
<wheel_separation>0.19</wheel_separation>
<wheel_radius>0.033</wheel_radius>
<topic>cmd_vel</topic>
</plugin>
<!-- Joint state publisher -->
<plugin filename="libignition-gazebo-joint-state-publisher-system.so"
name="ignition::gazebo::systems::JointStatePublisher">
<topic>joint_states</topic>
</plugin>
<!-- Global odometer -->
<plugin
filename="ignition-gazebo-odometry-publisher-system"
name="ignition::gazebo::systems::OdometryPublisher">
<odom_publish_frequency>50</odom_publish_frequency>
<odom_topic>/odom</odom_topic>
<odom_frame>odom</odom_frame>
<robot_base_frame>base_footprint</robot_base_frame>
<tf_topic>/odom/tf</tf_topic>
</plugin>
</model>
spawn機能を使う準備をする
今までは、worldタグの中にmodelタグを記述してきました。しかし、この書き方はフィールドとロボットを分離できません。例えば同じフィールド上で何種類かのロボットを順番に試したいとき、従来の方法ではworld.sdfを書き直す必要がありました。でも、面倒くさがる必要はありません、world.sdfに書かれていなくても後からロボットをフィールドに配置することができるんです、そう!spawn機能を使えばね👍。
spawn機能を使うために、従来のディレクトリ構成を少し変更しましょう。先ず、modelディレクトリ内にworldsディレクトリを作成して今までのworld.sdfはそこへ移動し、nav_slam.sdfという名前にしましょう。この名前は諸事情があってこう決まっているわけですが、新しいワークスペースで作業している皆さんには関係がないので、好きに命名してくれても構いません。但し、その場合は後々のlaunchファイルのパラメータを少し変更する必要があることに注意して下さい。
次に、modelsディレクトリに新しくLidarRoboディレクトリを作成し、その中にmodel.sdfという新規ファイルとmeshディレクトリを格納してください。以下のようなディレクトリ構成になっていればOKです。
package/
models/
LidarRobo/
mesh/
2DRoboPrac.stl
2DRoboPrac.ade
model.sdf
worlds/
nav_slam.sdf
model.sdfには次のように記述して下さい。
<sdf version='1.8'>
</sdf>
それができたら、nav_slam.sdfからmodelタグ部分をまるごと切り取り、model.sdfのsdfタグ内に貼り付けます。
これでspawn機能を使う準備は完了です。
spawn機能を使う
どのワールドにどのロボットをspawnさせるかはlaunchファイルで指定します。先ず、フィールドの読み込みですが、これは従来のgazeboの起動方法と同じように行います。
#ワールドのsdfファイルを設定(worldタグのあるsdfファイル)
world = os.path.join(pkg_share_dir, "models", "worlds", "nav_slam.sdf")
#ignition gazeboの起動設定
ign_gz = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
[os.path.join(get_package_share_directory('ros_ign_gazebo'),
'launch', 'ign_gazebo.launch.py')]),
launch_arguments=[('ign_args', [' -r -v 3 ' +
world
])])
次に、今指定したワールドにロボットをspawnさせるには以下のように記述します。spawnさせる位置などのパラメータは適当に調整して下さい。
#ロボットをスポーンさせる設定
ignition_spawn_entity = Node(
package='ros_ign_gazebo',
executable='create',
output='screen',
arguments=['-entity', 'LidarRobo4',
'-name', 'LidarRobo4',
#ロボットのsdfファイルを指定
'-file', PathJoinSubstitution([
pkg_share_dir,
"models", "LidarRobo4", "model.sdf"]),
#ロボットの位置を指定
'-allow_renaming', 'true',
'-x', '0.1',
'-y', '0.2',
'-z', '0.075'],
)
最後に、return内にこれらの処理を実行する記述をします。
return LaunchDescription([
ign_resource_path,
ignition_spawn_entity,
ign_gz,
DeclareLaunchArgument(
'use_sim_time',
default_value=use_sim_time,
description='If true, use simulated clock'),
DeclareLaunchArgument(
'world_name',
default_value=world_name,
description='World name'),
bridge,
teleop_node,
])
launchファイルを起動すると、ちゃんとロボットがspawnしていることが分かります。
フィールドを用意する
LiDARをロボットに取り付けましたが、現状のフィールドには壁がないので、何も読み取ることができません。これは余りにも愚かしいので壁の付いたフィールドを用意しましょう。自分の使いたいフィールドがある読者はそれを使うことができます。そうでない場合はgithubからros2_ws/src/nav_dev/models/field/mesh/からフィールドのCADデータをコピーしてきて使いましょう。今回の記事でもこれを使います。
新たにmodelsディレクトリ内にfieldディレクトリを作成し、その中にmeshディレクトリを作成してフィールドのCADデータを入れて下さい。fieldディレクトリ配下にmodel.sdfを作成して以下のように記述します。
<?xml version="1.0" ?>
<sdf version="1.6">
<model name="my_field" canonical_link='field'>
<!--動かないエンティティであることを設定-->
<static>true</static>
<link name="field">
<collision name="collision">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://field/meshes/HaruRobo2024field.stl</uri>
</mesh>
</geometry>
<surface>
<friction>
<ode>
<mu>1.2</mu>
<mu2>1.2</mu2>
</ode>
</friction>
</surface>
</collision>
<visual name="visual">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://field/meshes/HaruRobo2024field.dae</uri>
</mesh>
</geometry>
</visual>
</link>
</model>
</sdf>
staticタグをtrueに設定することが重要です。gazebo側はこのモデルをフィールドだと認識する機能を備えていないので、これを指定しなければシミュレーションを開始した瞬間にフィールドも落下し始めます。
それができたら、launchファイルにフィールドもspawnさせるよう、追記していきます。
#フィールドをスポーンさせる設定
ignition_spawn_world = Node(
package='ros_ign_gazebo',
executable='create',
output='screen',
#フィールドのsdfファイルを指定
arguments=['-file', PathJoinSubstitution([
pkg_share_dir,
"models", "field", "model.sdf"]),
'-allow_renaming', 'false'],
)
return内に忘れずに追記をしたら、launchファイルを起動しましょう。
以上の記事の内容を全て実装したlaunchファイルはgithubのros2_ws/src/nev_dev/launch/nav_spawn.launch.pyにあります。

フィールドが表示されていることが分かります。
gaebo上のロボットの状態をrvizで表示する
rvizの起動
単純にrvizを起動するだけならrviz2とターミナルの任意の場所で打てば立ち上げることができます。しかし、そのためにターミナルを1つ割り当てるのはやはり面倒なのでlaunchファイルから起動することにします。
#rviz2の設定フィルのパスを取得
rviz_config_dir = os.path.join(
pkg_share_dir,
'config',
'nav_nav2.rviz')
#rviz2の起動設定
rviz2 = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen')
以上のようにすることでlaunchファイルからrvizを起動する設定ができます。但し、この場合rvizの設定ファイルが必要になります。以下に私が作成したテンプレートを示すので、コピペして使って下さい。
rviz設定ファイルテンプレート
Panels:
- Class: rviz_common/Displays
Help Height: 0
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /TF1/Frames1
- /TF1/Tree1
- /Odometry1/Topic1
Splitter Ratio: 0.5833333134651184
Tree Height: 778
- Class: rviz_common/Selection
Name: Selection
- Class: rviz_common/Tool Properties
Expanded:
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz_common/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: nav2_rviz_plugins/Navigation 2
Name: Navigation 2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz_default_plugins/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Class: rviz_default_plugins/RobotModel
Collision Enabled: false
Description File: ""
Description Source: Topic
Description Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /robot_description
Enabled: false
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
Mass Properties:
Inertia: false
Mass: false
Name: RobotModel
TF Prefix: ""
Update Interval: 0
Value: false
Visual Enabled: true
- Class: rviz_default_plugins/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: false
base_footprint:
Value: true
base_link:
Value: true
base_scan:
Value: true
odom:
Value: true
wheel_left_link:
Value: true
wheel_right_link:
Value: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: false
Tree:
odom:
base_footprint:
base_link:
base_scan:
{}
wheel_left_link:
{}
wheel_right_link:
{}
Update Interval: 0
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz_default_plugins/LaserScan
Color: 255; 255; 255
Color Transformer: Intensity
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 0
Min Color: 0; 0; 0
Min Intensity: 0
Name: LaserScan
Position Transformer: XYZ
Selectable: true
Size (Pixels): 3
Size (m): 0.009999999776482582
Style: Points
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Best Effort
Value: /scan
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz_default_plugins/PointCloud2
Color: 255; 255; 255
Color Transformer: ""
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: Bumper Hit
Position Transformer: ""
Selectable: true
Size (Pixels): 3
Size (m): 0.07999999821186066
Style: Spheres
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Best Effort
Value: /mobile_base/sensors/bumper_pointcloud
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 1
Class: rviz_default_plugins/Map
Color Scheme: map
Draw Behind: true
Enabled: true
Name: Map
Topic:
Depth: 1
Durability Policy: Transient Local
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /map
Update Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /map_updates
Use Timestamp: false
Value: true
- Alpha: 1
Class: nav2_rviz_plugins/ParticleCloud
Color: 0; 180; 0
Enabled: true
Max Arrow Length: 0.30000001192092896
Min Arrow Length: 0.019999999552965164
Name: Amcl Particle Swarm
Shape: Arrow (Flat)
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Best Effort
Value: /particle_cloud
Value: true
- Class: rviz_common/Group
Displays:
- Alpha: 0.30000001192092896
Class: rviz_default_plugins/Map
Color Scheme: costmap
Draw Behind: false
Enabled: true
Name: Global Costmap
Topic:
Depth: 1
Durability Policy: Transient Local
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /global_costmap/costmap
Update Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /global_costmap/costmap_updates
Use Timestamp: false
Value: true
- Alpha: 0.30000001192092896
Class: rviz_default_plugins/Map
Color Scheme: costmap
Draw Behind: false
Enabled: true
Name: Downsampled Costmap
Topic:
Depth: 1
Durability Policy: Transient Local
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /downsampled_costmap
Update Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /downsampled_costmap_updates
Use Timestamp: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz_default_plugins/Path
Color: 255; 0; 0
Enabled: true
Head Diameter: 0.019999999552965164
Head Length: 0.019999999552965164
Length: 0.30000001192092896
Line Style: Lines
Line Width: 0.029999999329447746
Name: Path
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: Arrows
Radius: 0.029999999329447746
Shaft Diameter: 0.004999999888241291
Shaft Length: 0.019999999552965164
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /plan
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz_default_plugins/PointCloud2
Color: 125; 125; 125
Color Transformer: FlatColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: VoxelGrid
Position Transformer: XYZ
Selectable: true
Size (Pixels): 3
Size (m): 0.05000000074505806
Style: Boxes
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /global_costmap/voxel_marked_cloud
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 1
Class: rviz_default_plugins/Polygon
Color: 25; 255; 0
Enabled: false
Name: Polygon
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /global_costmap/published_footprint
Value: false
Enabled: true
Name: Global Planner
- Class: rviz_common/Group
Displays:
- Alpha: 0.699999988079071
Class: rviz_default_plugins/Map
Color Scheme: costmap
Draw Behind: false
Enabled: true
Name: Local Costmap
Topic:
Depth: 1
Durability Policy: Transient Local
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_costmap/costmap
Update Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_costmap/costmap_updates
Use Timestamp: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz_default_plugins/Path
Color: 0; 12; 255
Enabled: true
Head Diameter: 0.30000001192092896
Head Length: 0.20000000298023224
Length: 0.30000001192092896
Line Style: Lines
Line Width: 0.029999999329447746
Name: Local Plan
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.029999999329447746
Shaft Diameter: 0.10000000149011612
Shaft Length: 0.10000000149011612
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_plan
Value: true
- Class: rviz_default_plugins/MarkerArray
Enabled: false
Name: Trajectories
Namespaces:
{}
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /marker
Value: false
- Alpha: 1
Class: rviz_default_plugins/Polygon
Color: 25; 255; 0
Enabled: true
Name: Polygon
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_costmap/published_footprint
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz_default_plugins/PointCloud2
Color: 255; 255; 255
Color Transformer: RGB8
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: VoxelGrid
Position Transformer: XYZ
Selectable: true
Size (Pixels): 3
Size (m): 0.009999999776482582
Style: Flat Squares
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /local_costmap/voxel_marked_cloud
Use Fixed Frame: true
Use rainbow: true
Value: true
Enabled: true
Name: Controller
- Class: rviz_common/Group
Displays:
- Class: rviz_default_plugins/Image
Enabled: true
Max Value: 1
Median window: 5
Min Value: 0
Name: RealsenseCamera
Normalize Range: true
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /intel_realsense_r200_depth/image_raw
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz_default_plugins/PointCloud2
Color: 255; 255; 255
Color Transformer: RGB8
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: RealsenseDepthImage
Position Transformer: XYZ
Selectable: true
Size (Pixels): 3
Size (m): 0.009999999776482582
Style: Flat Squares
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /intel_realsense_r200_depth/points
Use Fixed Frame: true
Use rainbow: true
Value: true
Enabled: false
Name: Realsense
- Class: rviz_default_plugins/MarkerArray
Enabled: true
Name: MarkerArray
Namespaces:
{}
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /waypoints
Value: true
- Angle Tolerance: 0.10000000149011612
Class: rviz_default_plugins/Odometry
Covariance:
Orientation:
Alpha: 0.5
Color: 255; 255; 127
Color Style: Unique
Frame: Local
Offset: 1
Scale: 1
Value: true
Position:
Alpha: 0.30000001192092896
Color: 204; 51; 204
Scale: 1
Value: true
Value: true
Enabled: true
Keep: 100
Name: Odometry
Position Tolerance: 0.10000000149011612
Shape:
Alpha: 1
Axes Length: 1
Axes Radius: 0.10000000149011612
Color: 255; 25; 0
Head Length: 0.30000001192092896
Head Radius: 0.10000000149011612
Shaft Length: 1
Shaft Radius: 0.05000000074505806
Value: Arrow
Topic:
Depth: 5
Durability Policy: Volatile
Filter size: 10
History Policy: Keep Last
Reliability Policy: Reliable
Value: /odom
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: base_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz_default_plugins/MoveCamera
- Class: rviz_default_plugins/Select
- Class: rviz_default_plugins/FocusCamera
- Class: rviz_default_plugins/Measure
Line color: 128; 128; 0
- Class: rviz_default_plugins/SetInitialPose
Covariance x: 0.25
Covariance y: 0.25
Covariance yaw: 0.06853891909122467
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /initialpose
- Class: rviz_default_plugins/PublishPoint
Single click: true
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /clicked_point
- Class: nav2_rviz_plugins/GoalTool
Transformation:
Current:
Class: rviz_default_plugins/TF
Value: true
Views:
Current:
Angle: -1.5707999467849731
Class: rviz_default_plugins/TopDownOrtho
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Scale: 116.60354614257812
Target Frame: <Fixed Frame>
Value: TopDownOrtho (rviz_default_plugins)
X: 0
Y: 0
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 932
Hide Left Dock: false
Hide Right Dock: true
Navigation 2:
collapsed: false
QMainWindow State: 000000ff00000000fd00000004000000000000016a00000348fc020000000afb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003e00000348000000ca00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb00000018004e0061007600690067006100740069006f006e002000320000000242000001440000014400fffffffb0000001e005200650061006c00730065006e0073006500430061006d00650072006100000002c6000000c10000002800ffffff000000010000010f0000034afc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000003d0000034a000000a600fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004420000003efc0100000002fb0000000800540069006d00650100000000000004420000000000000000fb0000000800540069006d00650100000000000004500000000000000000000004990000034800000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
RealsenseCamera:
collapsed: false
Selection:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: true
Width: 1545
X: 329
Y: 172
ディレクトリ構成は以下のようにして下さい
paclage/
config/
nav_rviz.rviz
launch/
nav_rviz.launch.py
launchファイルにはrvizを起動するための文言を書き足して下さい。
現段階で以下のようになっていることを想定しています。
launchファイルの確認
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import IncludeLaunchDescription, SetEnvironmentVariable
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration, PathJoinSubstitution
from launch_ros.actions import Node
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='true')
world_name = LaunchConfiguration('world_name', default='nav_slam_world')
pkg_share_dir = get_package_share_directory('nav_dev')
model_path = os.path.join(pkg_share_dir, "models")
#ignition gazeboがモデルにアクセスできるように設定
ign_resource_path = SetEnvironmentVariable(
name='IGN_GAZEBO_RESOURCE_PATH',value=[
os.path.join("/opt/ros/humble", "share"),
":" +
model_path])
#ロボットをスポーンさせる設定
ignition_spawn_entity = Node(
package='ros_ign_gazebo',
executable='create',
output='screen',
arguments=['-entity', 'LidarRobo',
'-name', 'LidarRobo',
#ロボットのsdfファイルを指定
'-file', PathJoinSubstitution([
pkg_share_dir,
"models", "LidarRobo", "model.sdf"]),
#ロボットの位置を指定
'-allow_renaming', 'true',
'-x', '0.4',
'-y', '0.4',
'-z', '0.075',
],
)
#フィールドをスポーンさせる設定
ignition_spawn_world = Node(
package='ros_ign_gazebo',
executable='create',
output='screen',
#フィールドのsdfファイルを指定
arguments=['-file', PathJoinSubstitution([
pkg_share_dir,
"models", "field", "model.sdf"]),
'-allow_renaming', 'false'],
)
#ワールドのsdfファイルを設定(worldタグのあるsdfファイル)
world = os.path.join(pkg_share_dir, "models", "worlds", "nav_slam.sdf")
#ignition gazeboの起動設定
ign_gz = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
[os.path.join(get_package_share_directory('ros_ign_gazebo'),
'launch', 'ign_gazebo.launch.py')]),
launch_arguments=[('ign_args', [' -r -v 3 ' +
world
])])
#ros_ign_bridgeの起動設定
bridge = Node(
package='ros_ign_bridge',
executable='parameter_bridge',
parameters=[{
#brigdeの設定ファイルを指定
'config_file': os.path.join(pkg_share_dir, 'config', 'nav_slam.yaml'),
'qos_overrides./tf_static.publisher.durability': 'transient_local',
'qos_overrides./odom.publisher.durability': 'transient_local',
},{'use_sim_time': use_sim_time}],
remappings=[
("/odom/tf", "tf"),
],
output='screen'
)
#rviz2の設定フィルのパスを取得
rviz_config_dir = os.path.join(
pkg_share_dir,
'config',
'nav_rviz.rviz')
#rviz2の起動設定
rviz2 = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen')
return LaunchDescription([
ign_resource_path,
ignition_spawn_entity,
ignition_spawn_world,
ign_gz,
DeclareLaunchArgument(
'use_sim_time',
default_value=use_sim_time,
description='If true, use simulated clock'),
DeclareLaunchArgument(
'world_name',
default_value=world_name,
description='World name'),
bridge,
#
#rvizを起動するための文言
#
rviz2,
])
以上の設定ファイルを読み込んでlaunchファイルを起動すると、以下のような画面になるかと思います。単にrviz2で起動したときと比べて見た目が幾らか変わっているでしょうか?
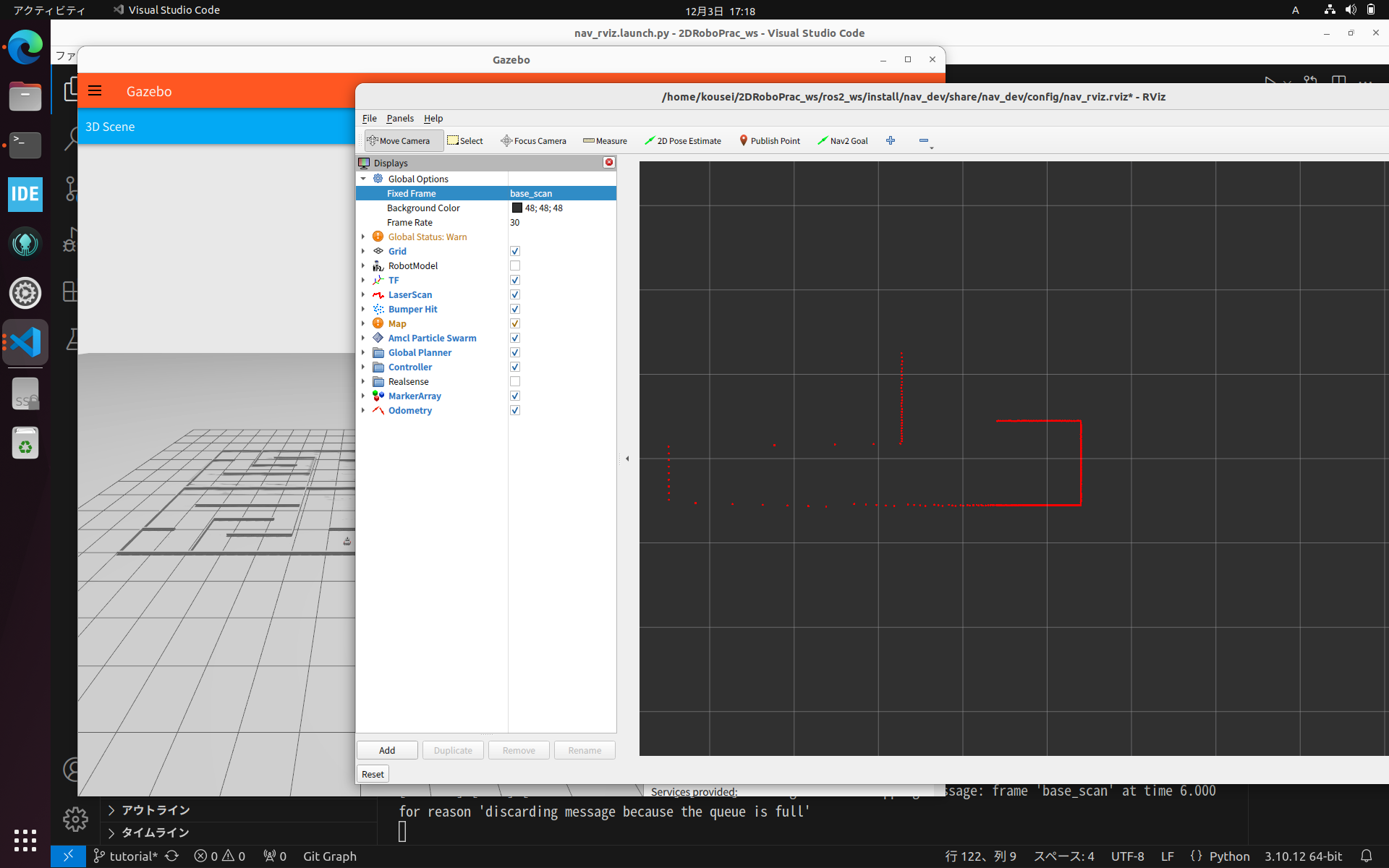
LiDARのデータを表示
実は、Lidarデータの表示はいままでの全てのことが正しく行われていれば簡単にできます。rviz画面左上にfixed frameという項目があるかと思います。ここに、sdfファイルのsensorタグで指定していたignition frame idの値を入力して下さい。この記事通りの実装ならbase_scanです。すると、以下のようにLiDARから取得されたデータが表示され始めるのを確認できるはずです。
odom
odometry(オドメトリ)とはロボットの位置と角度を意味します。これをrviz上で取得するためにはsdfモデルに以下のプラグインを書き足す必要があります。
<!-- Global odometer -->
<plugin
filename="ignition-gazebo-odometry-publisher-system"
name="ignition::gazebo::systems::OdometryPublisher">
<odom_publish_frequency>50</odom_publish_frequency>
<odom_topic>/odom</odom_topic>
<odom_frame>odom</odom_frame>
<robot_base_frame>base_footprint</robot_base_frame>
<tf_topic>/odom/tf</tf_topic>
</plugin>
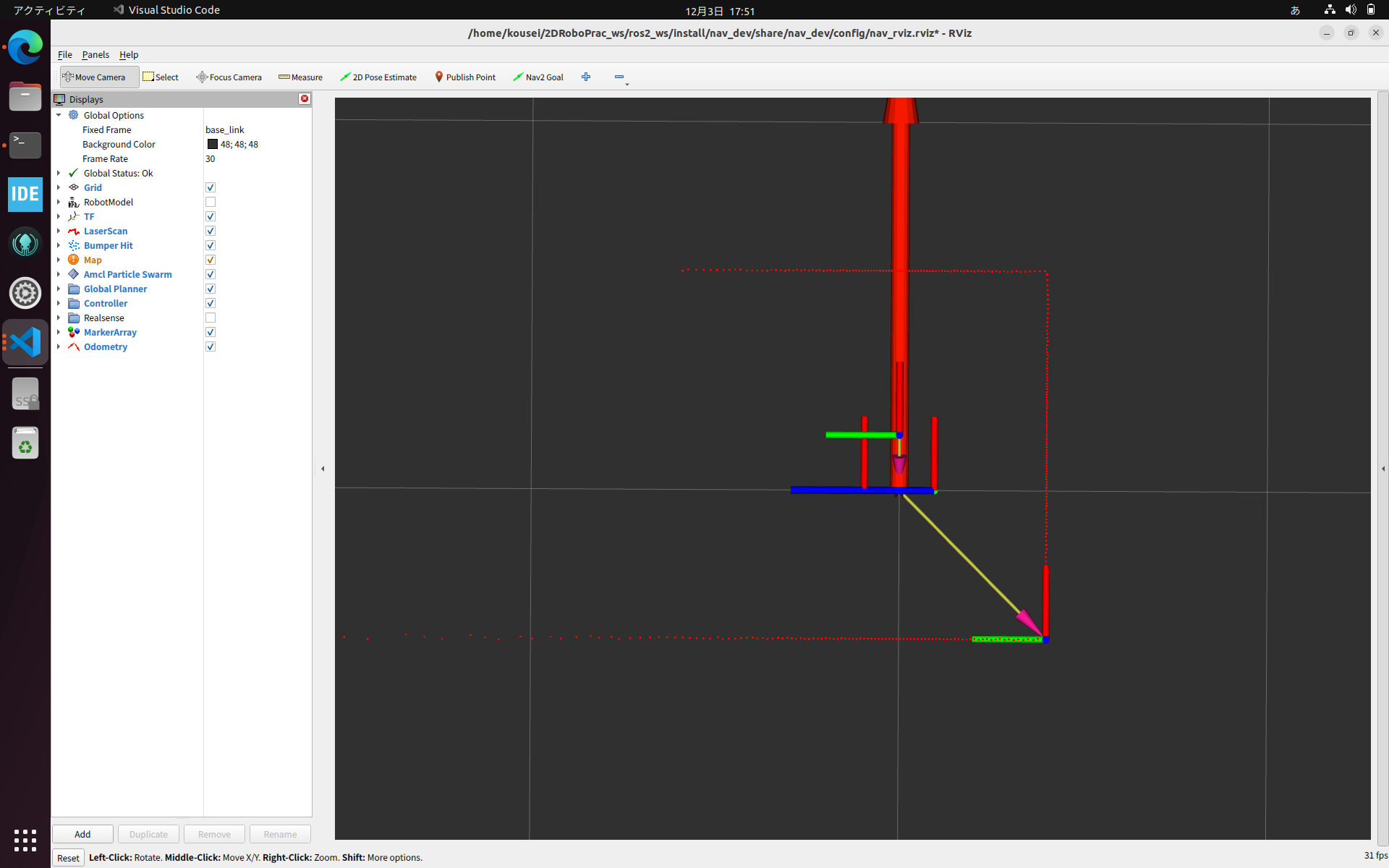
その上でもう一度launchファイルを起動してみましょう。fixed frameをodomにすると、以下のような結果が得られるはずです。
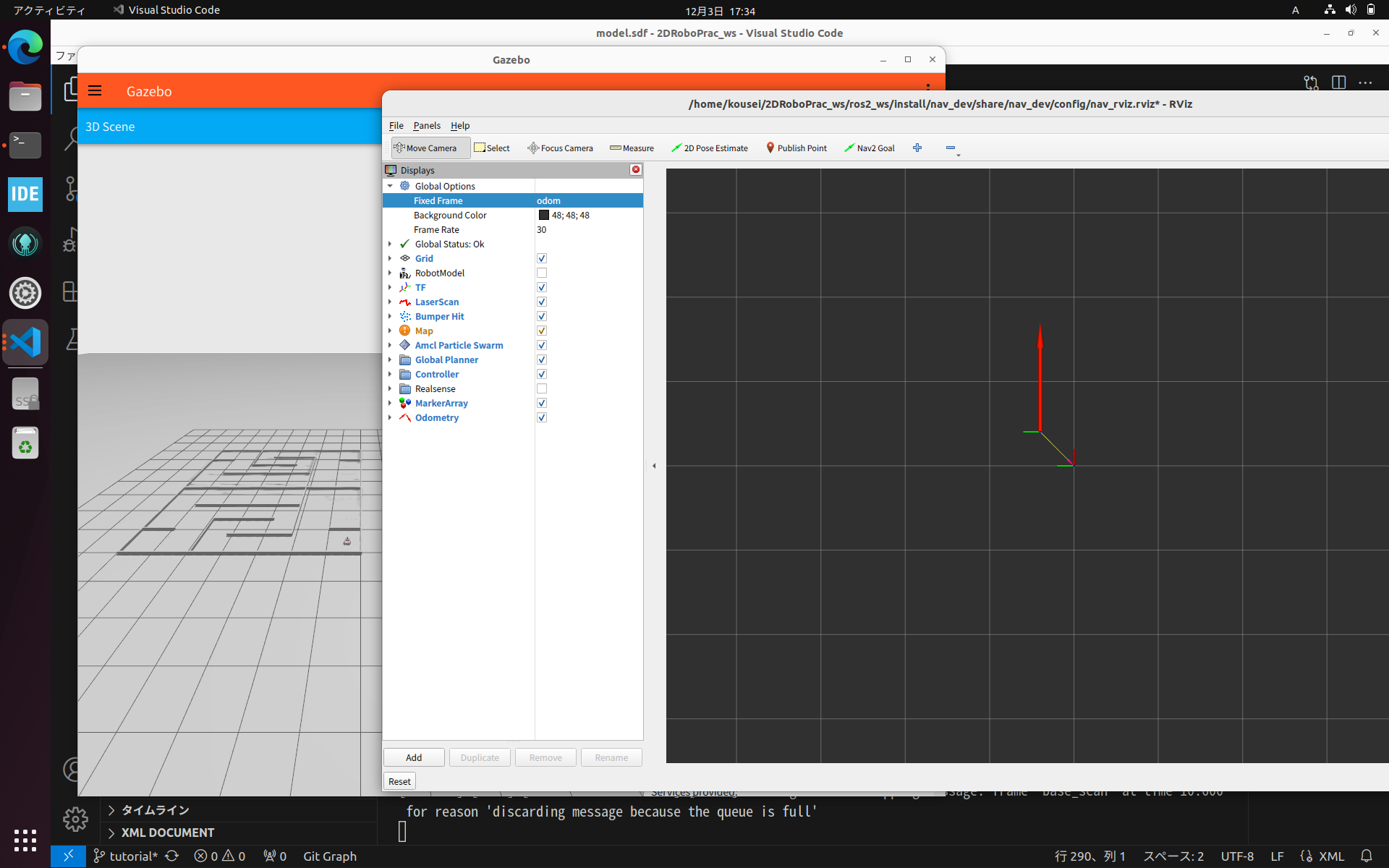
大きい矢印はロボットの向きを表し、小さい矢印はロボットが原点からどれだけ動いているかを表します。
tf
tfは上の2つに比べてやや難しい概念です。詳しくはROS2公式ドキュメントを参照してもらうとして、簡単に言うとそれは「ロボットの各パーツのジョイントの状態を表したもの」と表現できます。これを使えばロボットのモデルをまるごとrviz上に表示しなくても効果的にロボットの状態を把握できるのです。
さて、tfをrviz上で取得するには少々凝った準備が必要です。先ず、odomのときと同様に以下のプラグインをsdfモデルに追加する必要があります。
<!-- Joint state publisher -->
<plugin filename="libignition-gazebo-joint-state-publisher-system.so"
name="ignition::gazebo::systems::JointStatePublisher">
<topic>joint_states</topic>
</plugin>
次に、robot_state_publisherを起動する必要があります。ターミナルからの起動も可能ですが、launchファイルを使う方法を紹介します。robot_state_publisherは名前の通り、ロボットの状態を発信してくれますが、そのためには使っているロボットの情報を予め渡しておく必要があります。先ず、sdfをurdfに変換するためにxacroというツールを使います。launchファイルの上部にimport xacroを追記して下さい。次に、以下の内容をコピペします。
#ロボットのsdfファイルのパスを取得
sdf = os.path.join(
get_package_share_directory('nav_dev'),
'models', 'LidarRobo', 'model.sdf')
#xacroでsdfファイルをurdfに変換
doc = xacro.parse(open(sdf))
xacro.process_doc(doc)
#robot_state_publsherの起動設定
robot_state_publisher = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='both',
parameters=[{'use_sim_time': use_sim_time,
'robot_description': doc.toxml()}]) # type: ignore
以上の記事の内容を全て実装したlaunchファイルはgithubのros2_ws/src/nev_dev/launch/nav_rviz.launch.pyにあります。
このlaunchファイルを起動して、以下のような結果が得られれば成功です。
トラブルシューティング(追記求む)
一般論
・とりあえずsudo apt updateする
・gazeboのゾンビ化を疑う
gazeboは乱暴な閉じ方をしたときーそして丁寧に行った場合でもそれなりの頻度で、正常に終了せずプロセスがゾンビ化します
先ず、ps aux|grep ignで検索をかけます。正しく終了できていれば2つのプロセスが表示されます。
3つ以上ならプロセスのゾンビ化が発生しています。kill -9 <プロセス番号>で最初と最後のプロセス以外を強制終了します。
プロセスがゾンビ化しているときの代表的な挙動
・モデルやワールドの記述を変更したのに反映されていない
・何故かロボットが2つ表示される
・シミュレーションの開始ボタンのオンオフが高速で切り替わる
- tfが正常にpublishされているか確認する
tfの確認
記事の内容通りに実装した場合、tfのTreeはーrvizのパネルにあるtfで確認できる、以下のようになっているはずです。
base_footprint
base_link
base_scan
wheel_left_link
wheel_right_link
odom
以上のようになっていない場合、sdfファイルにおけるlinkの構成が間違っている可能性があります。
個別の対策
Lidarのデータが読み取れない
以下のようなエラーが出ていないか確認して下さい
Message fillter dropping message:~
for reason because the qeue is full
もし出ていたら、fixed frameの指定が間違っている可能性が高いです。そのあたりを見直して下さい。
sdfファイルで適切にignition_frame_idの記述が行われているかも確認して下さい。
終わりに
この記事ではrvizとgazeboの連携を確立し、それを通してrvizの基本的な機能を紹介しました。rvizは拡張性の高いツールでありー自分でプラグインを作成することもできます、これからのロボット開発の大きな助けとなるでしょう。
次回はslam toolboxとnavigation2を用いた自律走行を行う(gz)です。これまで行ってきたことの集大成として、gazebo+rvizでSLAMとnavigationに挑戦します。
これらの記事の全体像が知りたければ、ignition gazebo+Rviz2の開発環境構築も覗いてみてください。ここにはgazeboとrvizに関する私の書いた記事がまとめられています。
また、この記事で扱った内容を実装したコードは私のgithubに公開しています。今回の内容に相当する部分はリンク先のレポジトリのgz_ws/src/nav_devに収められています。