やりたいこと
3DmodelをVisualStudio community 2017を使って操作したい。
この要求を満たすものとして、Vrepを選びました。
Vrepを選んだ理由
- 新規Robotの順運動学計算の確認をするため
- メカ屋が作った3Dモデルを使って、簡単に動作確認ができる
- 無料で使用できる ※商用使用ではないという条件下で無料
キーワード:Vrep,remoteApi,Visual Studio
このキーワード検索で、ヒットした過去の記事として、以下があります。
(http://moryu-io-studio.hatenablog.com/entry/2017/12/16/221623)
但し、2年前の記事とは言え、その通りに実施しても、コンパイルエラー、Linkエラーなど動かせないという状況だったので、動作できるようにしました。
準備
・Visual Studio community 2017のインストール
・Copellia Sim Vrepのインストール (CoppeliaSim Edu V4.0.0 rev1)
(http://www.coppeliarobotics.com/downloads)
・サンプルに必要となるモデルの取り込み
(https://gallery.autodesk.com/fusion360/projects/1-dof-arm-for-v-rep)
※記事の内容を実現するには、1-DoF Arm for V-REPモデルが必要です。また、Fusion360をインストールし、モデルをVrepで読み込めるSTL、またはOBJに変更する必要があります。
結果
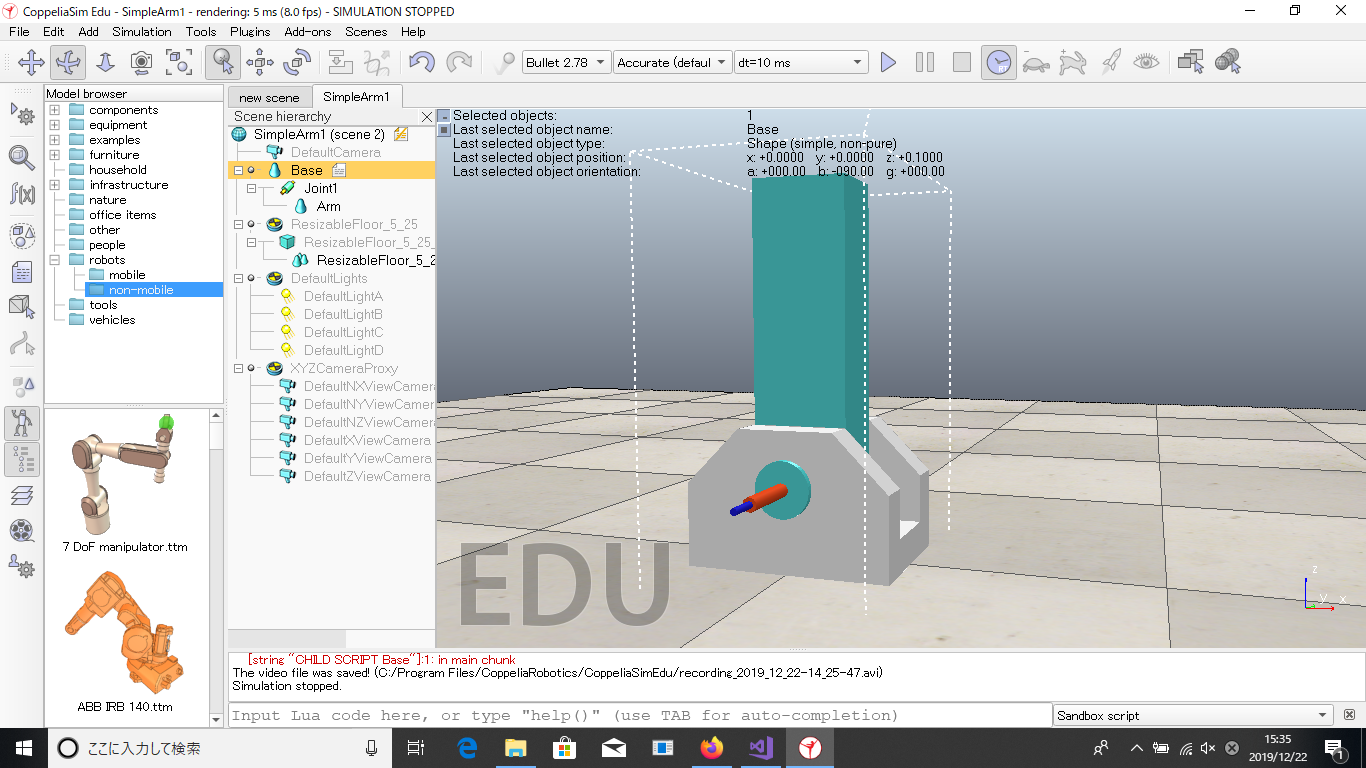
Vrepのシミュレーション実行ボタンを押し、Visual Studioでデバッグ実行すると、画面上のアームが、垂直姿勢を中心にして左右に揺れます。
本当は、映像を出したかったのですが、分かったら、再度編集予定。
手順
Vrep側の設定
本設定は、モデルをインストールでき、こちらの方の作業を実施した後の話になります。(http://moryu-io-studio.hatenablog.com/entry/2017/12/16/221623)
モデルは、BaseとArmに変更しました。BaseとArmの間にJointを追加するとともに、名前をJoint1としています。
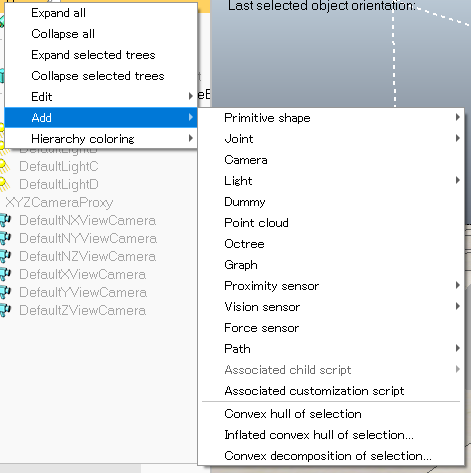
Baseの横には、Child Scriptを埋め込んでいます。
これは、下のように、Baseで右クリックし、>Add>Associated Child Script>Non Threadedを選択します。
Child Scriptには、以下のみを記述します。

これは、remoteAPIを使って、Visual StudioからVrepを動かすための設定(Port番号)です。
Visual Studio側の設定
C++のコードは、以下です。
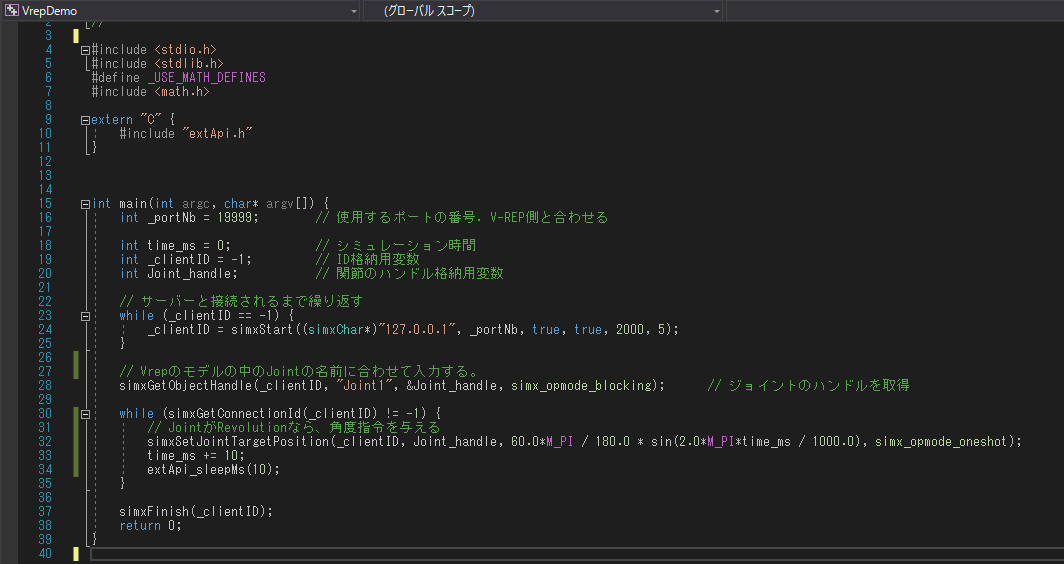
プロジェクトの構成は、以下です。
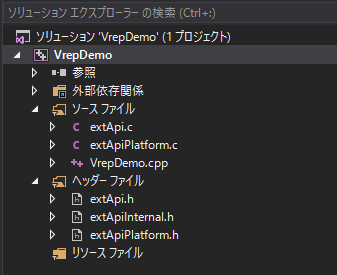
ソースファイル、及びヘッダーファイルにextApi.、expApiPlatform.、expApiApiInternal.hをソリューションに追加しています。
その他(Visual Studioのプロジェクトのプロパティの設定)
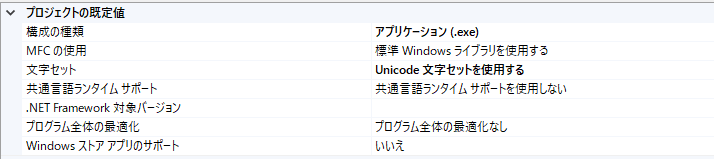
構成プロパティ>全般
この中で、
共通言語ランタイムサポート:共通言語ランタイムサポートを使用しないを選択
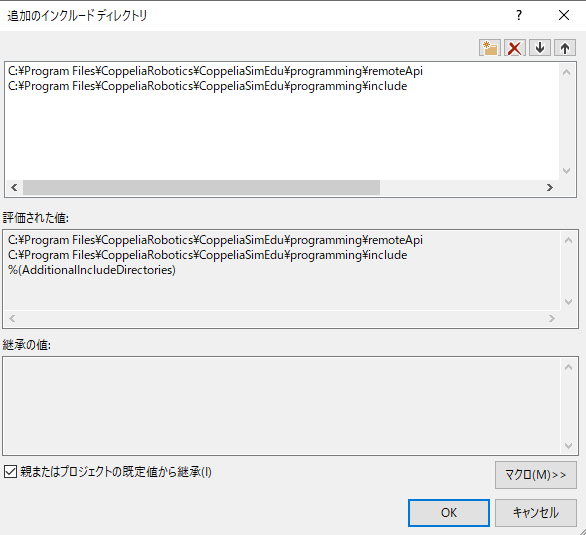
C/C++>全般
CoppeliaRobotics\CoppeliaSimEdu\Programming\の下のremoteApiフォルダと
includeフォルダを追加します。※インストールした場所の確認をお願いします。
C/C++>プリプロセッサ
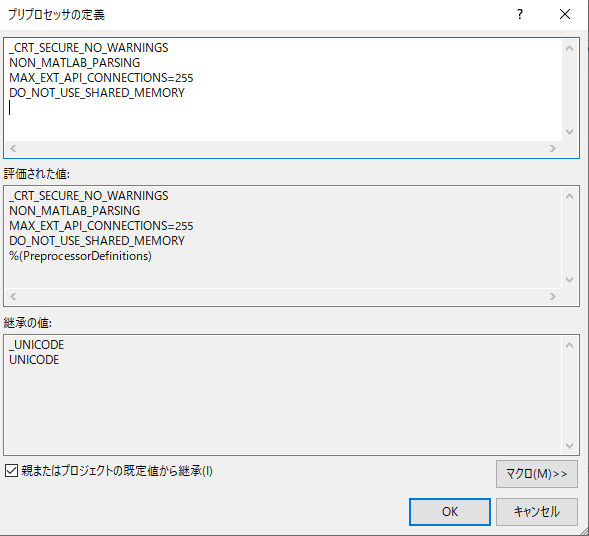
以上。