Raspberry Pi Picoの環境構築は、参考②に詳細がありますが、0は趣味だけど、二点注意を書いておきます。
0. ヘッドピンのハンダ付けされたものも売られているので、それを購入するのも便利
1.一度ダウンロードしてPicoにuf2ファイルをコピペするとそれ以後は、RasPi4のプログラミングからThonny Python IDEを立ち上げる
2.作成したコード名を、main.pyとしてPicoに保存すると次回電源に継げただけで自動的に起動する
やったこと
・環境構築;Lチカ;省略
・ADCで内蔵温度計測
・サーボを動かす
・I2CでMPU6050加速度等計測
・カメラ追跡アプリを動かす
・環境構築;Lチカ;省略
参考②に詳細に書かれているし、ググれば多くの同じ記述があるので、特にインストールは省略する。ただし、こんなに簡単にインストール出来るのはRaspberryPiのおかげだと思う。
そして、Thonny環境でのMicropythonのインストールまで参考になる。
一方、その言語仕様は普通のpythonとは少し異なるので、参考⑥⑦にリンクを張っておこうと思う。
数学関数などは、参考⑦のDocs » MicroPython ライブラリ » math -- 数学関数が便利です。
ただし、制約条件として「特定の MicroPython の亜種またはポートには、(リソースの制約またはその他の制限のために)この一般的なドキュメンテーションに記載されている機能/関数がサポートされていないことがあります。」ということです。
【参考】
①【Raspberry Pi Pico】サーボモーターをPWMで動かす【MicroPython】
②Raspberry Pi PicoでMicroPythonでPWM信号でスピーカーでメロディー演奏
③Raspberry Pi PicoのmicroPythonでI2CとADCを使ってみる
④How to use I2C Pins in Raspberry Pi Pico | I2C Scanner Code
⑤ラズパイ・ピコ(Raspberry Pi Pico)のmicropythonで3軸加速度センサー(ADXL345)を動作させる
⑥Getting started with Raspberry Pi Pico
⑦MicroPython ライブラリ
・ADCで内蔵温度計測
最も簡単なアプリを動かしてみます。
結線の仕方
内臓温度計は、単にUSBでRasPi4からPicoと結線するだけです。
計測コード
参考③より、以下のコードで内臓温度計測ができます。
なお、ADCは温度計測の4以外に以下の3つのADCが使える
【参考】可変抵抗を利用して電圧変えてADCで読み取る簡単なPGが掲載されている
How to use ADC in Raspberry Pi Pico | ADC Example Code
| ADC Module | GPIO Pins | コード |
|---|---|---|
| ADC0 | GP26 | machine.ADC(26) |
| ADC1 | GP27 | machine.ADC(27) |
| ADC2 | GP28 | machine.ADC(28) |
※import machineが必要です。 |
# MicroPython for Rapperry Pi Pico
import machine
import utime
if __name__ == '__main__':
sensor_temp = machine.ADC(4)
conversion_factor = 3.3 / (65535)
while True:
reading = sensor_temp.read_u16() * conversion_factor
temperature = 27 - (reading - 0.706)/0.001721
tempStr = " {:5.1f}C".format(temperature)
print(temperature)
utime.sleep(1)
計測結果は以下のとおり、なお、「View-Plotter」をチェックいれておくと、Shellの右側の枠にグラフが現れます。
27.0444
27.51255
27.51255
27.0444
27.51255
27.98069
28.44883
...
・サーボを動かす
次に、参考①のコード改変して二種類のサーボを動かします.
結線の仕方
①USBでRasPi4からPicoに接続します。
②サーボモーターの3線の内、+を3.3v以上6v以下, -をGND、そして制御信号(PWM)を結線します。
| サーボ | + | GND | PWM | コード |
|---|---|---|---|---|
| サーボ1 | 電池+ | 電池-&GND | GP0 | PWM(Pin(0)) |
| サーボ2 | 電池+ | 電池-&GND | GP1 | PWM(Pin(1)) |
| ※**電池-はGP38などのGNDと結線する。**電池は単三4本(6v)の電池ボックスやLIPO(4.2v)で可。 | ||||
| ※電池供給で無いとpicoが不安定になる | ||||
※from machine import PWM, Pinが必要です |
||||
 |
||||
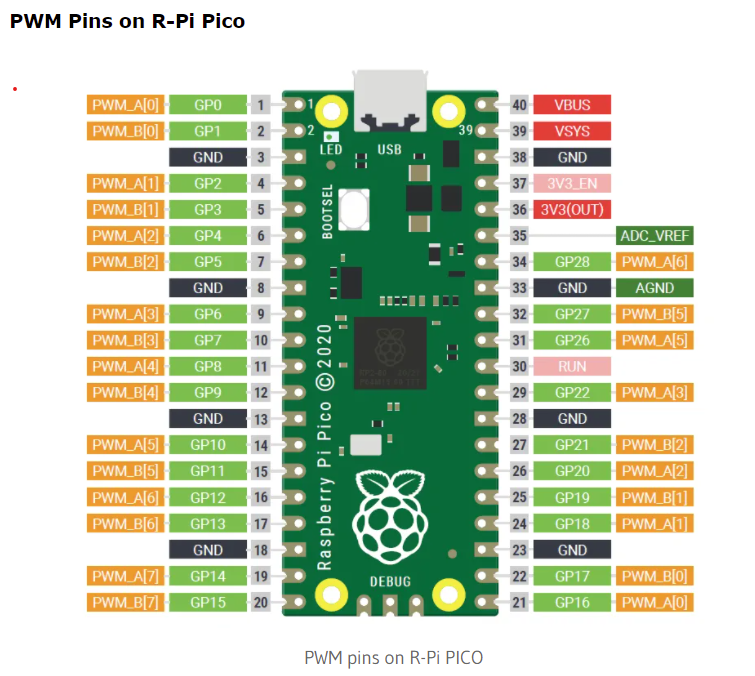
| 【参考】上図のPWM出力は以下のサイトから転載させていただきました | ||||
| Raspberry Pi Pico Pinout, specifications, datasheet in detail |
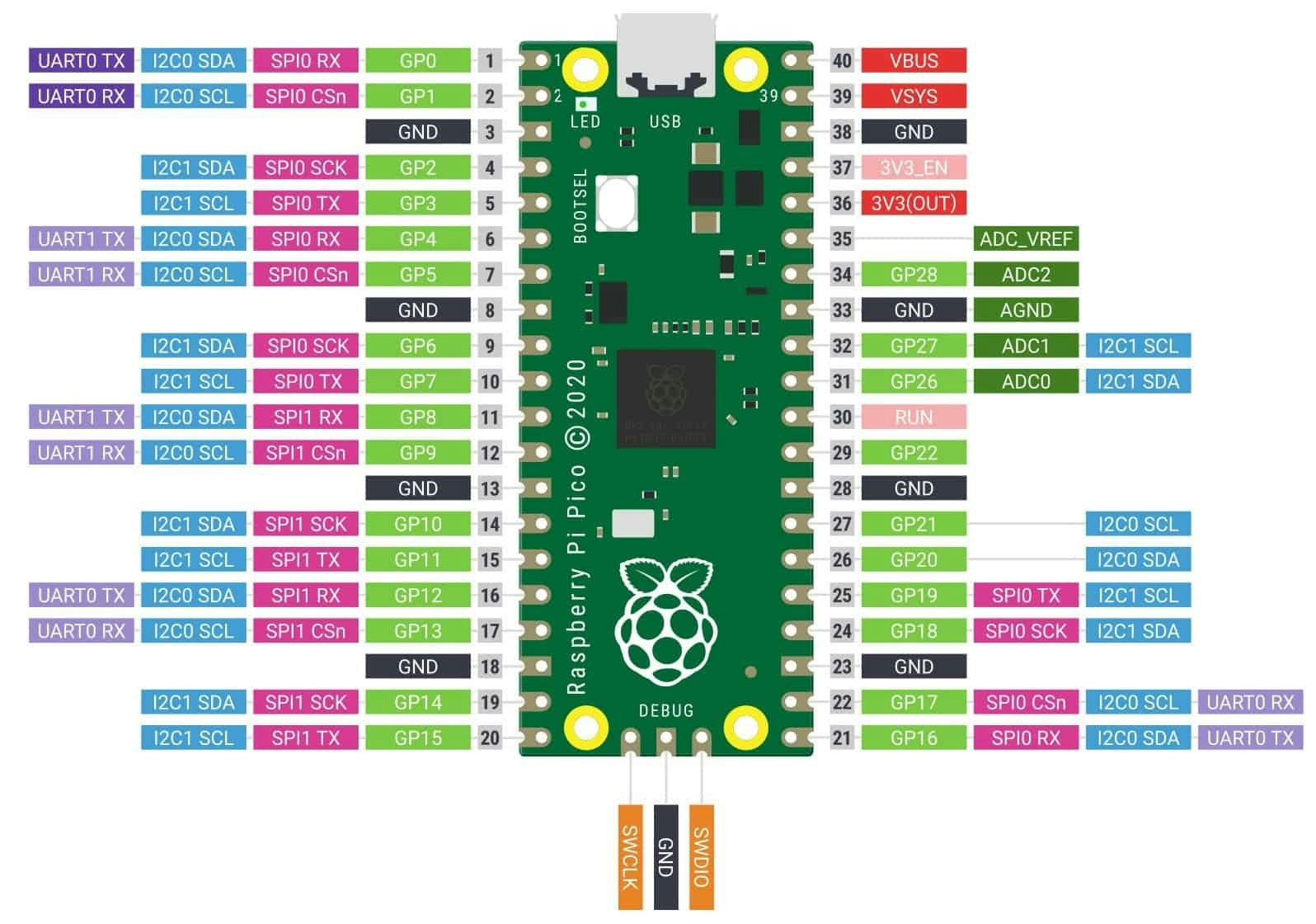
通常よく見るピン配置は以下の通りです。
計測コード
今回は、参考①のボードのPin GP0, GP1を使って、SG90を動かします。
(なお、結線は上の通り電池供給が安全です)
データシートpdfから、50Hzで
「Position "0" (1.45 ms pulse) is middle, "90" (~2.4 ms pulse) is all the way to the right, "-90" (~ 0.5 ms pulse) is all the way lef」
つまり、
Duty;0.5ms pulse(−90 deg)〜1.45ms pulse(0 deg)〜2.4ms pulse(90 deg)
全幅:20ms(50Hz)なので、比は以下のように求められる。
0.5/20=0.025, 1.45/20=0.0725, 2.4/20=0.12
これに分解能の65025をかけると、それぞれのdutyが得られる.
from machine import PWM, Pin
import time
servo1 = PWM(Pin(0))
servo2 = PWM(Pin(1))
servo1.freq(50)
servo2.freq(50)
led_onboard = Pin(25, Pin.OUT)
max_duty = 65025
dig_0 = 0.0725 #0°
dig_90 = 0.12 #90°
dig__90 = 0.025 #-90°
servo1.duty_u16(int(max_duty*dig_0))
for i in range(10):
servo1.duty_u16(int(max_duty*(dig_90-dig_0)*i/10))
led_onboard.value(1) # LEDを光らせる
time.sleep(0.5)
led_onboard.value(0) # LEDを消す
time.sleep(0.5)
print(i)
servo1.duty_u16(int(max_duty*dig_0))
servo2.duty_u16(int(max_duty*dig_0))
for i in range(0,10):
servo2.duty_u16(int(max_duty*(dig_90-dig_0)*i/10))
led_onboard.value(1) # LEDを光らせる
time.sleep(0.5)
led_onboard.value(0) # LEDを消す
time.sleep(0.5)
print(i)
servo2.duty_u16(int(max_duty*dig_0))
・I2CでMPU6050加速度等計測
最後の要素技術は、I2Cを利用して、MPU6050を使って加速度を読み取ります。
結線の仕方
結線はpicoとMPU6050と以下のとおり結線します。
|MPU6050|GPIO Pins|コード|
|:-:|:-:|:-:|:-:|:-:|
|VCC|3V3(OUT)|-|
|GND|GND|-|
|SCL|GP13|scl = Pin(13)|
|SDA|GP12|sda = Pin(12)|
※self.i2c = I2C(0,scl = self.scl, sda = self.sda, freq = 100000)で初期化トリガーを掛けています
以下のように他のGPIO Pinsも使えます。
| I2C Controller | GPIO Pins |
|---|---|
| I2C0 SDA | GP0/GP4/GP8/GP12/GP16/GP20 |
| I2C0 SCL | GP1/GP5/GP9/GP13/GP17/GP21 |
| I2C1 SDA | GP2/GP6/GP10/GP14/GP18/GP26 |
| I2C1 SCL | GP3/GP7/GP11/GP15/GP19/GP27 |
計測コード
まず、以下のコードにより、アクティブなI2Cのアドレスを読み取ります。
参考④より
# https://how2electronics.com/how-to-use-i2c-pins-in-raspberry-pi-pico-i2c-scanner/
import machine
sda=machine.Pin(12)
scl=machine.Pin(13)
i2c=machine.I2C(0,sda=sda, scl=scl, freq=400000)
print('Scan i2c bus...')
devices = i2c.scan()
if len(devices) == 0:
print("No i2c device !")
else:
print('i2c devices found:',len(devices))
for device in devices:
print("Decimal address: ",device," | Hexa address: ",hex(device))
結果は、十進数で104と求められます。
そこで、以下のコードではslvAddr=104としています。
そして、レジスタリセットとクリアは前回のコードやMPU6050のデータシート(前回記事参照)から
self.writeByte(0x6B,0x80)
self.writeByte(0x6B,0x00)
なお、writeByte関数は参考④から以下のコード内のように定義しています。
これで、自由にMPU6050で加速度、などが計測できます。
なお、角速度や温度なども読める完全版はおまけに掲載しています。
from machine import Pin
from machine import I2C
import time
import ustruct
# unsignedを、signedに変換(16ビット限定)
def u2s(unsigneddata):
if unsigneddata & (0x01 << 15) :
return -1 * ((unsigneddata ^ 0xffff) + 1)
return unsigneddata
class mpu6050:
def __init__(self, scl, sda):
self.scl = scl
self.sda = sda
self.i2c = I2C(0,scl = self.scl, sda = self.sda, freq = 100000)
#slv = self.i2c.scan()
self.slvAddr = 104 #slv[0]
# レジスタをリセットする
self.writeByte(0x6B,0x80)
time.sleep(0.1)
# PWR_MGMT_1をクリア
self.writeByte(0x6B,0x00)
time.sleep(0.1)
def readXYZ(self):
data = self.readByte(0x3B ,6)
x = (2.0 / 0x8000) * u2s(data[0] << 8 | data[1])
y = (2.0 / 0x8000) * u2s(data[2] << 8 | data[3])
z = (2.0 / 0x8000) * u2s(data[4] << 8 | data[5])
return (x,y,z)
def writeByte(self, addr, data):
d = bytearray([data])
self.i2c.writeto_mem(self.slvAddr, addr, d)
def readByte(self, addr, num):
s = self.i2c.readfrom_mem(self.slvAddr, addr, num)
return s
scl = Pin(13)
sda = Pin(12)
snsr = mpu6050(scl, sda)
while True:
x,y,z = snsr.readXYZ()
print('x:',x,'y:',y,'z:',z,'uint:mg')
time.sleep(0.5)
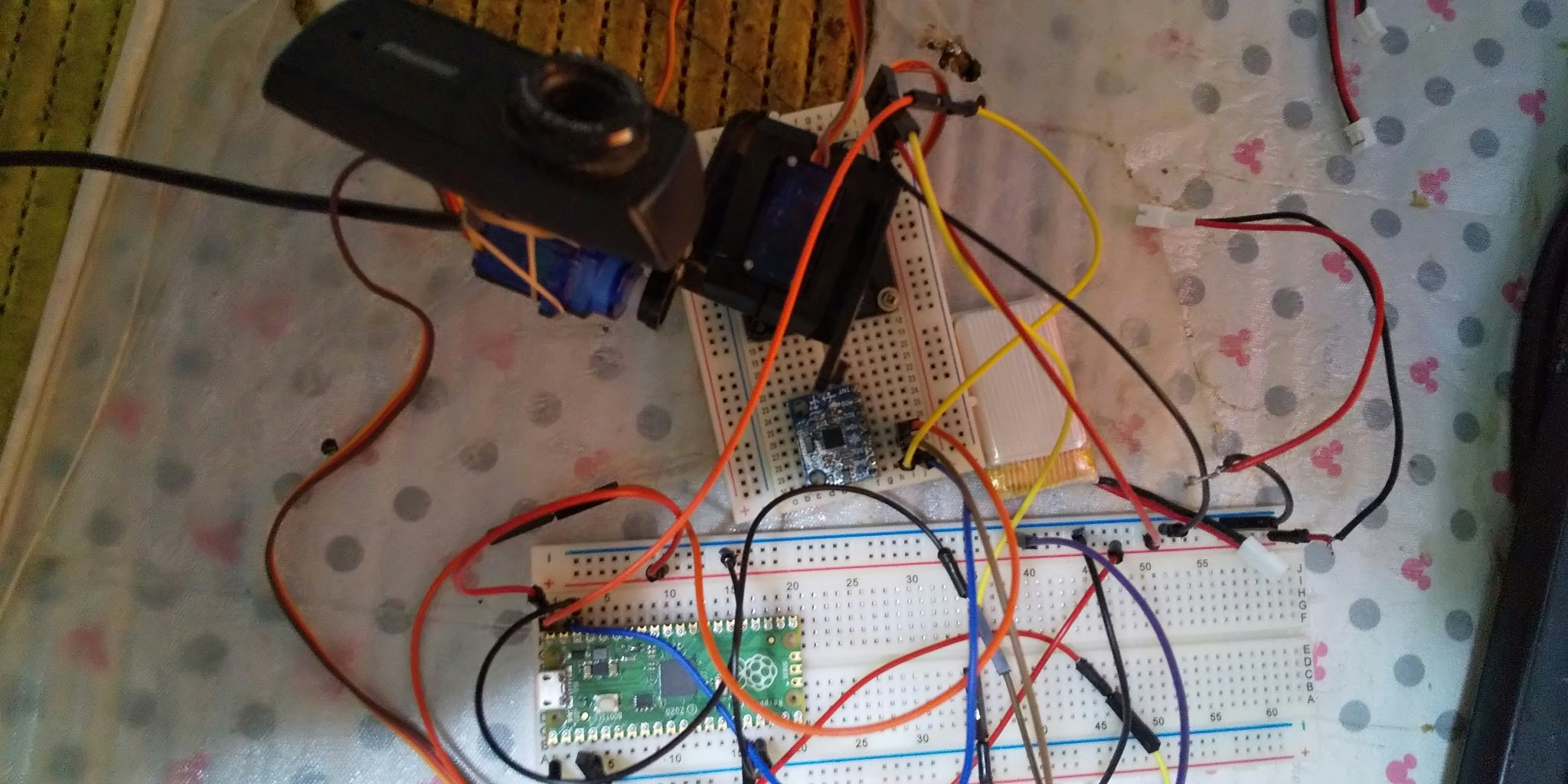
・カメラ追跡アプリを動かす
以上の要素をつなぎ合わせると、前回のカメラ追跡アプリが完成します。
ここで、面倒なのは前回記事ではnumpyで数学関数を利用しましたが、micropythonではそれが利用できないので、上述したmathというLibを利用しました。
また、matplotlibも使えないので、代わりにログ出力として以下でファイルに書き出しています。
これで、write1.txtというファイルにx,yzなどが書き込まれます。
f = open('write1.txt', 'wb')
f.write('t: x: y: z: /g ' + ' \n')
f.write('{}'.format(t)+ ' ')
f.write('{0:.2f} {1:.2f} {2:.2f}'.format(x,y,z)+'\n')
こうして、完全版は以下のようになります。
一応、前回と同様な動きでカメラとセンサーを同じ基板上に配置して、動かすとカメラが常に同一の方角を見てくれます。つまり、自分の顔を最初に入れると基盤を動かしても追跡してくれます。
from machine import Pin
from machine import I2C
from machine import PWM
import time
import math as mt
class mpu6050:
def __init__(self, scl, sda):
self.scl = scl
self.sda = sda
self.i2c = I2C(0,scl = self.scl, sda = self.sda, freq = 100000)
slv = self.i2c.scan()
self.slvAddr = 104 #slv[0]
# レジスタをリセットする
self.writeByte(0x6B,0x80)
time.sleep(0.1)
self.writeByte(0x6B,0x00)
time.sleep(0.1)
def readXYZ(self):
data = self.readByte(0x3B ,6)
x = (2.0 / 0x8000) * u2s(data[0] << 8 | data[1])
y = (2.0 / 0x8000) * u2s(data[2] << 8 | data[3])
z = (2.0 / 0x8000) * u2s(data[4] << 8 | data[5])
return (x,y,z)
def writeByte(self, addr, data):
d = bytearray([data])
self.i2c.writeto_mem(self.slvAddr, addr, d)
def readByte(self, addr, num):
#print(self.slvAddr, addr)
#time.sleep(0.5)
s = self.i2c.readfrom_mem(self.slvAddr, addr, num)
#print(s)
#time.sleep(0.5)
return s
# unsignedを、signedに変換(16ビット限定)
def u2s(unsigneddata):
if unsigneddata & (0x01 << 15) :
return -1 * ((unsigneddata ^ 0xffff) + 1)
return unsigneddata
def get_angle(rawX, rawY, rawZ):
if mt.fabs(rawZ) > 0.7:
acc_angle_x = mt.degrees(mt.atan2(rawX, rawZ))
acc_angle_y = mt.degrees(mt.atan2(rawY, rawZ))
acc_angle_z = 0
elif mt.fabs(rawX) > 0.7:
acc_angle_x = mt.degrees(mt.atan2(rawX, rawZ))
acc_angle_y = 0
acc_angle_z = mt.degrees(mt.atan2(rawX, rawY))
elif mt.fabs(rawY) >0.7:
acc_angle_x = 0
acc_angle_y = mt.degrees(mt.atan2(rawY, rawZ))
acc_angle_z = mt.degrees(mt.atan2(rawX, rawY))
else:
acc_angle_x = mt.degrees(mt.atan2(rawX, rawZ))
acc_angle_y = mt.degrees(mt.atan2(rawY, rawZ))
acc_angle_z = mt.degrees(mt.atan2(rawX, rawY))
return acc_angle_x,acc_angle_y,acc_angle_z
if __name__ == "__main__":
start = time.time()
scl = Pin(13)
sda = Pin(12)
servo1 = PWM(Pin(0))
servo2 = PWM(Pin(2))
servo1.freq(50)
servo2.freq(50)
max_duty = 65025
dig_0 = 0.0725 #0°
dig_90 = 0.12 #90°
dig__90 = 0.0725-(0.12-0.0725)
const_ = max_duty*(dig_90-dig_0)
snsr = mpu6050(scl, sda)
f = open('write1.txt', 'wb')
f.write('t: x: y: z: /g ' + ' \n')
try:
while True:
t = time.time()- start
print(t)
x,y,z = snsr.readXYZ()
acc_angle_x,acc_angle_y,acc_angle_z = get_angle(x,y,z)
print(acc_angle_x,acc_angle_y,acc_angle_z)
duty = int(max_duty*dig_0) + int((0-acc_angle_y)*const_/90)
duty1 = int(max_duty*dig_0) + int((acc_angle_x)*const_/90)
print(duty, duty1)
servo1.duty_u16(duty)
servo2.duty_u16(duty1)
f.write('{}'.format(t)+ ' ')
f.write('{0:.2f} {1:.2f} {2:.2f}'.format(x,y,z)+'\n')
time.sleep(1)
except KeyboardInterrupt:
pass
finally:
f.close()
pass
・電源LIPO 1Sを利用した全体像
電源供給としてRaspberryPi4などを離れて、USBの代わりにLIPO 1S(3.7v 600mAh)を使ってみると、自律して動きました。
※保護回路としてdiodeやコンデンサを繋げていませんが、動作は確認できたレベル
上記のコードをmain.pyとして、RaspberryPi picoに格納すれば、電源が入った時点で自動的に動き始めます。
電源つなぎ方:ここではV-Bus:5v(LIPO3.7v給電)GNDを利用しました;以下の各Raspberry Piの回路図や参考⑨を参考に自己責任でお願いします
(上では5v-GNDを上記のLIPOから3.7vを供給し、サーボにもこの電源から給電してみました;picoは回路図が未掲載で試行的にその場のみでやったので、通常運用には堪えないと思います)
【参考】
⑧Schematics for the various Raspberry Pi board versions:
⑨Raspberry Pi Picoの仕様書を読んでみる(5)
おまけ
このおまけが一番利用価値高そうです
logは、以下のようにファイル出力が出来ました。
【参考】
Docs » ESP8266 用クイックリファレンス » ESP8266用 MicroPythonチュートリアル » 3. 内部ファイルシステム
mpu6050のアドレスマップは以下のとおりです。
| Addr(Hex) | Addr(Dec.) | Register Name | R/W | Bit7 - Bit0 |
|---|---|---|---|---|
| 3B | 59 | ACCEL_XOUT_H | R | ACCEL_XOUT[15:8] |
| 3C | 60 | ACCEL_XOUT_L | R | ACCEL_XOUT[7:0] |
| 3D | 61 | ACCEL_YOUT_H | R | ACCEL_YOUT[15:8] |
| 3E | 62 | ACCEL_YOUT_L | R | ACCEL_YOUT[7:0] |
| 3F | 63 | ACCEL_ZOUT_H | R | ACCEL_ZOUT[15:8] |
| 40 | 64 | ACCEL_ZOUT_L | R | ACCEL_ZOUT[7:0] |
| 41 | 65 | TEMP_OUT_H | R | TEMP_OUT[15:8] |
| 42 | 66 | TEMP_OUT_L | R | TEMP_OUT[7:0] |
| 43 | 67 | GYRO_XOUT_H | R | GYRO_XOUT[15:8] |
| 44 | 68 | GYRO_XOUT_L | R | GYRO_XOUT[7:0] |
| 45 | 69 | GYRO_YOUT_H | R | GYRO_YOUT[15:8] |
| 46 | 70 | GYRO_YOUT_L | R | GYRO_YOUT[7:0] |
| 47 | 71 | GYRO_ZOUT_H | R | GYRO_ZOUT[15:8] |
| 48 | 72 | GYRO_ZOUT_L | R | GYRO_ZOUT[7:0] |
from machine import Pin
from machine import I2C
import time
class mpu6050:
def __init__(self, scl, sda):
self.scl = scl
self.sda = sda
self.i2c = I2C(0,scl = self.scl, sda = self.sda, freq = 100000)
slv = self.i2c.scan()
self.slvAddr = 104
# レジスタをリセットする
self.writeByte(0x6B,0x80)
time.sleep(0.1)
# PWR_MGMT_1をクリア
self.writeByte(0x6B,0x00)
time.sleep(0.1)
def readXYZ(self):
data = self.readByte(0x3B ,6)
x = (2.0 / 0x8000) * u2s(data[0] << 8 | data[1])
y = (2.0 / 0x8000) * u2s(data[2] << 8 | data[3])
z = (2.0 / 0x8000) * u2s(data[4] << 8 | data[5])
return (x,y,z)
def readTemp(self):
data = self.readByte(0x41 ,2)
raw = data[0] << 8 | data[1] # 上位ビットが先
# Temperature in degrees C = (TEMP_OUT Register Value as a signed quantity)/340 + 36.53
temp= u2s(raw)/340 + 36.53
return temp
def readGyro(self):
data = self.readByte(0x43 ,6)
x = (250 / 0x8000) * u2s(data[0] << 8 | data[1])
y = (250 / 0x8000) * u2s(data[2] << 8 | data[3])
z = (250 / 0x8000) * u2s(data[4] << 8 | data[5])
return (x,y,z)
def writeByte(self, addr, data):
d = bytearray([data])
self.i2c.writeto_mem(self.slvAddr, addr, d)
def readByte(self, addr, num):
s = self.i2c.readfrom_mem(self.slvAddr, addr, num)
return s
# unsignedを、signedに変換(16ビット限定)
def u2s(unsigneddata):
if unsigneddata & (0x01 << 15) :
return -1 * ((unsigneddata ^ 0xffff) + 1)
return unsigneddata
if __name__ == "__main__":
scl = Pin(13)
sda = Pin(12)
snsr = mpu6050(scl, sda)
f = open('write1.txt', 'wb')
f.write('x: y: z: /g temp gyrox: gyroy: gyroz: deg/s' + ' \n')
try:
while True:
x,y,z = snsr.readXYZ()
print('x:',x,'y:',y,'z:',z,'unit:mg')
temp = snsr.readTemp()
print('temp = {0:.2f} C'.format(temp))
gyrox,gyroy,gyroz = snsr.readGyro()
print('gyroX:',gyrox,'gyroy:',gyroy,'gyroz:',gyroz,'unit:deg/s')
f.write('{0:.2f} {1:.2f} {2:.2f} {3:.2f} {4:.2f} {5:.2f} {6:.2f} '.format(x,y,z,temp,gyrox,gyroy,gyroz)+' '+' \n')
time.sleep(0.5)
except KeyboardInterrupt:
pass
finally:
f.close()
pass
x: y: z: /g temp gyroX: gyroy: gyroz: deg/s
-0.21 0.05 1.10 27.49 -6.09 0.70 -0.80
-0.21 0.05 1.10 27.54 -5.94 1.01 -0.64
-0.21 0.04 1.09 27.59 -5.99 1.02 -0.82
-0.21 0.05 1.09 27.54 -6.16 0.61 -0.75
-0.21 0.05 1.09 27.49 -6.00 0.79 -0.69
-0.21 0.05 1.09 27.59 -6.07 0.65 -0.69
>>> %Run -c $EDITOR_CONTENT
49
x: -0.2084961 y: 0.04760742 z: 1.0979 unit:mg
temp = 27.49 C
gyroX: -6.088257 gyroy: 0.7019043 gyroz: -0.8010864 unit:deg/s
42
x: -0.2116699 y: 0.0480957 z: 1.099609 unit:mg
temp = 27.54 C
gyroX: -5.943298 gyroy: 1.014709 gyroz: -0.6408691 unit:deg/s
42
x: -0.2121582 y: 0.0402832 z: 1.088623 unit:mg
temp = 27.59 C
gyroX: -5.989075 gyroy: 1.022339 gyroz: -0.8239746 unit:deg/s
42
x: -0.2133789 y: 0.04833984 z: 1.092529 unit:mg
temp = 27.54 C
gyroX: -6.164551 gyroy: 0.6103516 gyroz: -0.7476807 unit:deg/s
42
x: -0.2126465 y: 0.04541016 z: 1.09375 unit:mg
temp = 27.49 C
gyroX: -6.004333 gyroy: 0.7858276 gyroz: -0.6866455 unit:deg/s
42