ros2-rustを動かしてみた報告と理解ができていない部分のまとめです。
(自分でもコミットできるかと思ったのですが、理解してない部分が多くて先に進めぬ。。。)
環境
- OS Ubuntu 20.04
- ROS FoxyFitzroy (Dashingでは何個かヘッダが見つからずビルドエラー)
- rustc 1.46.0
- cargo 1.46.0
準備
Rustのインストール
下記コマンドでインストールできます。
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
インストール時に以下の画面出ますが1を選んでください。
1) Proceed with installation (default)
2) Customize installation
3) Cancel installation
>
スクリプトがPATHを勝手に通してくれるのですが、一旦ログアウトしないと適用されないので、ログアウト&ログインしてください。
使用ツールのインストール
vcstool他必要なツールをインストールします。
sudo apt install python3-vcstool libclang-dev clang git
ソースコードのインポート
(2020/10/29修正 wgetだけじゃインポートできなくなってた)
mkdir -p ~/ros2_rust_ws/src/ros2-rust
cd ~/ros2_rust_ws/src/ros2-rust
git clone https://github.com/ros2-rust/ros2_rust.git
cd ../../
vcs import src < src/ros2-rust/ros2_rust/ros2_rust.repos
ビルド
あとは、いつものようにros2のビルドをすれば良いだけ。
source /opt/ros/foxy/setup.sh
colcon build
実行
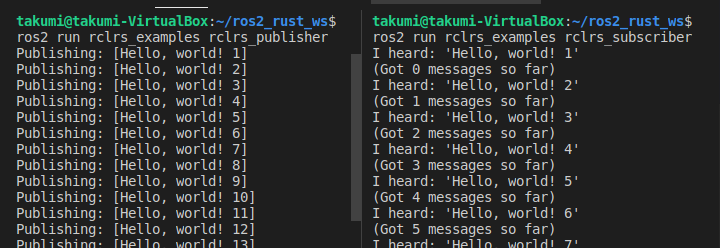
Publisher端末
source ./install/setup.sh
ros2 run rclrs_examples rclrs_publisher
Subscriber端末
source ./install/setup.sh
ros2 run rclrs_examples rclrs_subscriber
実行結果はこんな感じ。
この辺分からん
サンプル動かしてみただけなので、まだちゃんと読んでませんが、以下の部分理解してなかったり、知識不足です。。
知ってる方いたら教えてください。。。。
- ros2/common_interfaces, ros2/rcl_interfaces, ros2/rosidl_defaultsの3つのリポジトリの役割
- おそらくidlの生成とかrclを自前で作るのに必要なリポジトリっぽい。あとで調べる
- この辺の資料知ってる人居たら、コメント貰えると嬉しいです
- rcls_examplesのCargo.tomlにrclrsについての記述が無い(なぜ?)
- おそらくammentやcolconの都合でこうなってるんだろうけど。。ぱっと見不自然。。
参考
ros2-rustのリポジトリ https://github.com/ros2-rust/ros2_rust