はじめに
C++でROSアプリケーションの開発を行う際に,ステップ実行でデバッグができると非常に便利です.特に,GUIデバッガで実行時のパラメータをウォッチすることは,開発効率の向上に大いに寄与します.
QtCreatorはそれを実現するためのIDEの一つです.CMakeに対応しており,簡単な設定でROSと連携できるので,よく使われているようです.
設定方法は下記の動画を参考にさせていただきました.
How to open ROS package by qtcreator
初見は動画で見るのが良いのですが,後から見返そうと思うとやはり静止画でのチュートリアルが欲しいと思い,メモを残すことにしました.
環境
- OS: Ubuntu 14.04 LTS
- QtCreator: Ver.3.4.2
- ROS: indigo
設定手順
パッケージを読み込む
-
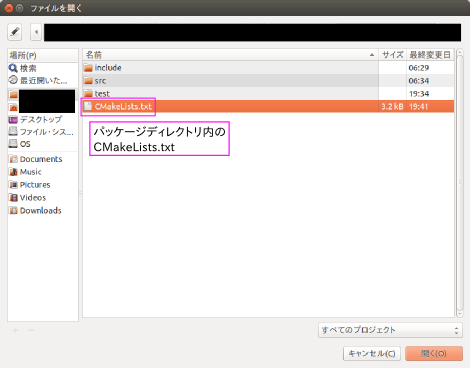
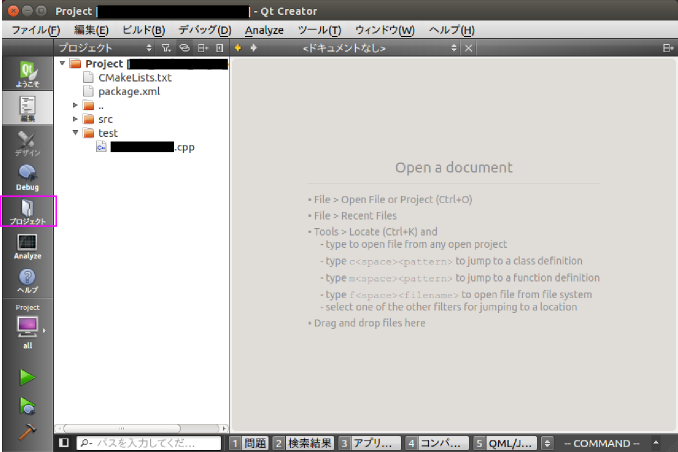
QtCreator を起動し,「プロジェクトを開く」ボタンを押します.

-
パッケージディレクトリ内のCMakeLists.txtを開きます.
-
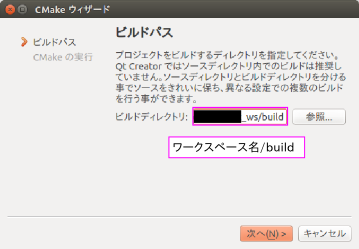
ビルドバスを入力します.
ワークスペース名/buildのフルパスを入力します.
-
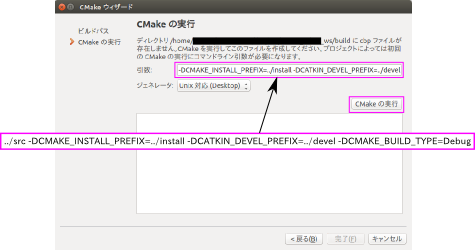
CMakeの引数を指定し,「CMakeの実行」ボタンを押します.
-
引数:
../src -DCMAKE_INSTALL_PREFIX=../install -DCATKIN_DEVEL_PREFIX=../devel -DCMAKE_BUILD_TYPE=Debug
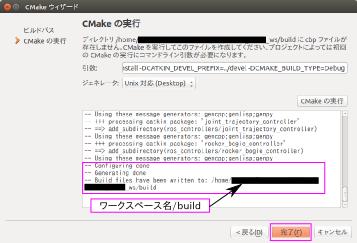
- メッセージを確認します.「完了」ボタンを押せば,プロジェクトの読込みは完了です.
-
Build files have been written to : ワークスペースへのパス/buildというメッセージが出ていれば,成功です.
プロジェクトの設定を行う
-
左側のメニューから「プロジェクト」ボタンを選択します.
-
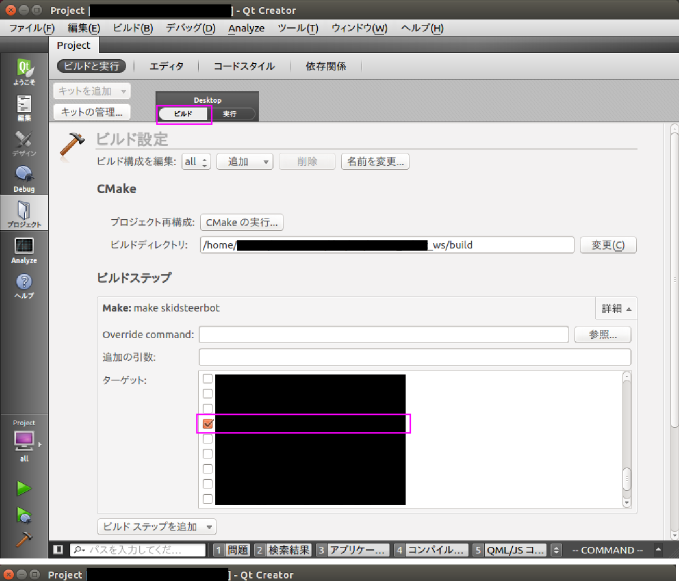
ビルド設定を行います.ビルドステップ→ターゲットにて,デバッグ実行対象のソースコードを選択します.
-
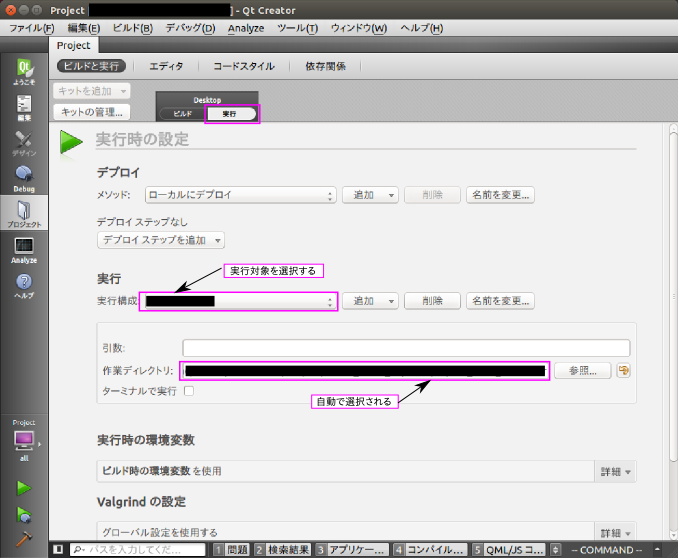
実行時の設定を行います.現在開いているプロジェクトのから起動するモジュールを選択します.IDEの「実行」ボタンを押した時に,実行される対象をここで選択することになります.
-
ブレイクポイントを指定し,デバッグ実行をする.
-
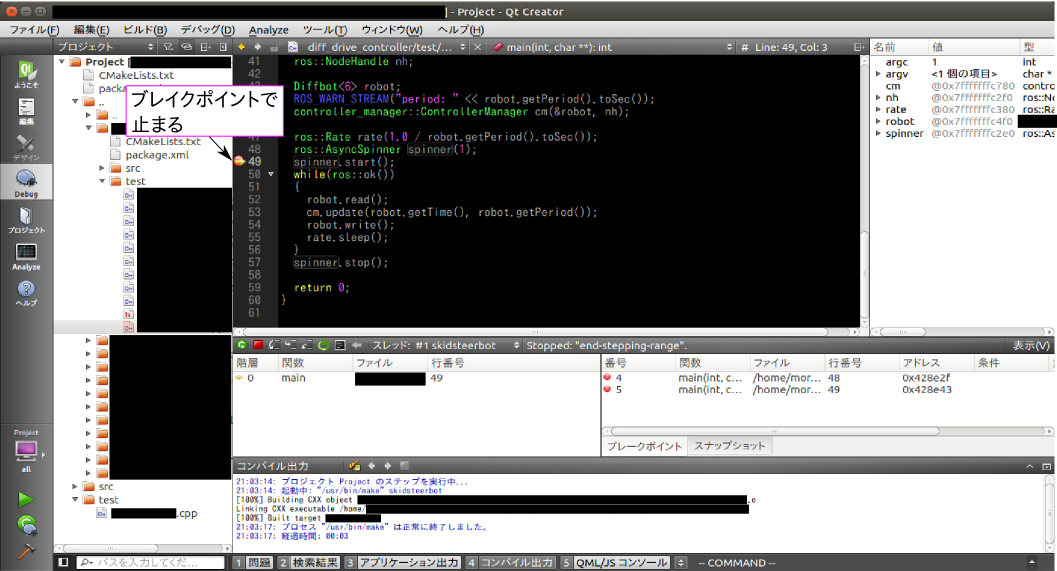
F9でブレイクポイントを設定し,F5で実行します.初回,及び変更点がある場合はF5押下時にビルドをしてからモジュールが実行されます.
-
黄色の矢印が現在のステップです.赤い丸で示したブレイクポイントで停止し,ウォッチウィンドウから変数を覗くことができていれば,成功です.
終わりに
かなり簡単な設定でGUIデバッガの起動まで辿りつけました.IDEを使うこと自体賛否両論がありますが,私はIDEが大好きで,積極的に活用しています.直感的に変数を可視化できる機能は,バグの発見に大いに貢献してくれています.
もし,printfデバッグに疲れた時は,さくっと試してみる価値はあると思います.