※改良版の【改良版】Raspberry Pi Zero + Arduino連携のカメラ付きリモコン戦車を作成しました(2021/1/10追記)
完全オリジナルではなく、HIRAMINEさん作のRCタンクの改作です。
RC戦車の製作記事はいろいろありますが、速度調整ができなかったり、
旋回が超信地旋回のみのものが多いようです。
実際に操縦してみると、微妙なハンドル操作が必要なので、操作画面を改良しました。
前面カメラの画像を見ながら、家の中を自在に探検できます。
改良版を作成しました(2019/2/23追記)
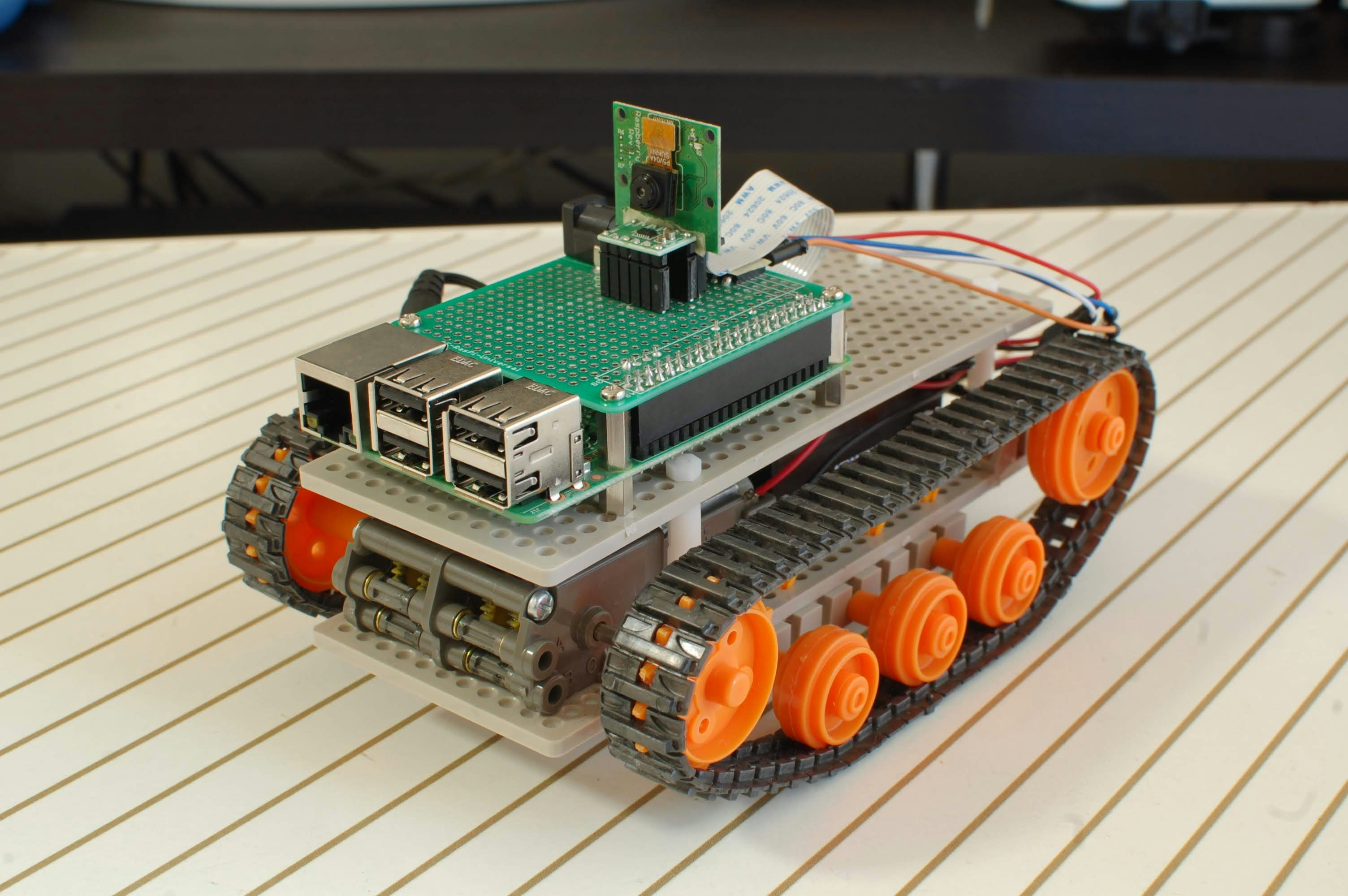
Raspberry Pi Zero + Arduino連携のカメラ付きリモコン戦車
ハードウェア
- Raspberry Pi3 Model B
- HiLetgo OV5647 5MP Raspberry Pi 3 カメラ OV5647 HDカメラモジュール
- タミヤ 楽しい工作シリーズ No.100 トラック&ホイールセット (70100)
- タミヤ 楽しい工作シリーズ No.97 ツインモーターギヤーボックス (70097)
- タミヤ 楽しい工作シリーズ No.157 ユニバーサルプレート 2枚セット (70157)
基本的にはHIRAMINEさんのサイトの「02.ハードウェア仕様」のとおりです。
カメラのみ、軽量なRaspberry PI用のカメラモジュールにしました。
本家カメラは高いので、今回は類似品です。
ソフトウェア
- Raspbian 9.4
- Python 3.5.3
- WebIOPi-0.7.1
ソフトウェア構成も、基本的にはHIRAMINEさんのサイトの「07.ソフトウェア実装」と同様ですが、
プログラムはオリジナルです。
操作画面
rctank.html
JavaScriptで作成。(2018/9/16改修しました)
前後進ともに5速とし、各速度ごとにデューティー比を返してコントロールプログラムに渡します。
旋回は、ボタンを押すたびに片方のキャタピラの速度を1段階づつ落とします。
戦車ならではの超信地旋回モードも別途用意しました。
超信地旋回は2速で、左右のキャタピラが逆回転します。
JQueryを使用して、キーボード操作ができるように改良しました。(2018/7/9追記)
前進・後進・左右旋回:矢印キー
停止:スペースキー
左右超信地旋回:Z、X
コントロールプログラム
rctank.py
Pythonで作成。
操作画面から送られたデューティー比を引数に、モーターを回転させます。
デモ
本体を見ないで操縦する感覚は独特で、宇宙探査機のようです。
操作画面

走行動画

感想
モーターのパワーが小さいためか、重量バランスが走行性能に大きく影響します。
HIRAMINEさんの設計は、半田付けが必要であり、若干敷居が高いですが、
他の作品と比べて、かなりコンパクトにまとまっています。
今回はカメラをRaspberry PI専用カメラモジュールにして、さらに軽量化しました。
駆動系はタミヤのツインモーターギヤーボックスセットを使用していますが、
重量バランスが適切でないと、回転時の音が非常にうるさいです。
今回は駆動輪を前に持ってきて、Raspberry PIも車体前方に配置し、
前よりの重量バランスにすると静かになりました。
参考文献
金丸 隆志
Raspberry Piで学ぶ電子工作 超小型コンピュータで電子回路を制御する
(ブルーバックス) 2014/11/21
クジラ飛行机
やさしくはじめるラズベリー・パイ ~電子工作で簡易ロボット&ガジェットを作ってみよう~
マイナビ出版 2017/5/24