背景・目標
Arduino Nano Everyと呼ばれるお手軽なマイコンボードがあります.
ArduinoではArduinoISPと呼ばれるコードを利用してArduinoをAVRライター化することができるのですが,当時(2020年)ではArduinoISPはArduino Nano Everyに対応しきれていない様子でした.
そこで,ArduinoISPをちょっと書き換えてArduino Nano Everyに対応させたいというのが目標です.
私はあまりArduino言語(?)に詳しくないため、誤りがありましたら指摘していただけると幸いです.
普通に書き込んでみる
ArduinoISPをNano Everyに書き込んだ様子がこちらです.
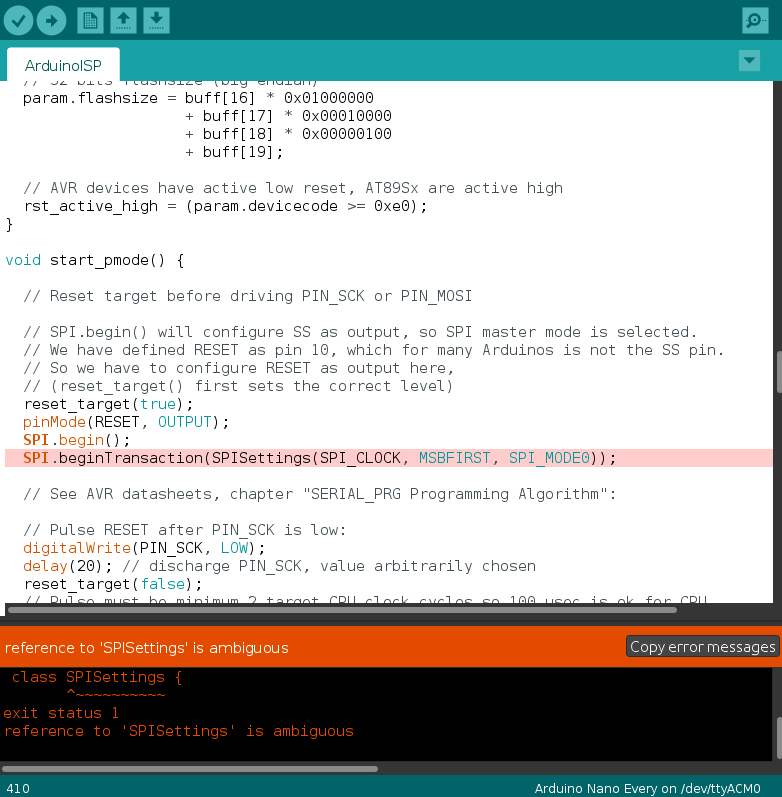
Arduino 1.8.13ではSPISettingクラスがambiguousだと怒られます。SPISettingというクラスが他の場所でも定義されているためのようですね。
原因
このArduinoISPをArduino Unoに書き込んでもこのようなエラーは出ません.ではなぜNano Everyで発生するのか?それを探るべくArduinoISPコードを見てみると,そこで見つかる関係している部分がこちらです.
// (略)
#define SPI_CLOCK (1000000/6)
#if defined(ARDUINO_ARCH_AVR)
#if SPI_CLOCK > (F_CPU / 128)
#define USE_HARDWARE_SPI
#endif
#endif
// (中略)
#ifdef USE_HARDWARE_SPI
#include "SPI.h"
#else
#define SPI_MODE0 0x00
class SPISettings {
// 略
};
class BitBangedSPI {
// 略
};
static BitBangedSPI SPI;
#endif
// (略)
このコードの特に注目していただきたいのがこちら.
#if SPI_CLOCK > (F_CPU / 128)
#define USE_HARDWARE_SPI
#endif
ここでは,定義されている「USE_HARDWARE_SPI」という定数名からわかる通り,ハードウェアSPI通信を使うかどうかを決定しています.条件からSPI_CLOCKとF_CPUに依存して決めていることもわかります.
具体的には,ライターにしようとしているArduinoのCPUクロックに合わせて,SPI通信が,ソフトウェアSPI通信かハードウェアSPI通信(Arduinoライブラリを利用)かの,どちらかに切り替えられます.
(試しにstatic BitBangedSPI SPIを消してみるとわかりやすい.)
さて,これが先程のambiguousだというお叱りとどう関係があるかというと,ソフトウェアSPIを使う場合はSPISetting等のソフトウェアSPIをするためのコードをArduinoISPコード内で定義しているのですが,SPISettingsは標準でも利用可能なため名前衝突がおきてしまいます.
SPISettingsは,なにも,includeしなくてもNano Everyで使えるのです.つまり
void setup() {
SPISettings(1, MSBFIRST, SPI_MODE0);
}
void loop() {
// something
}
はコンパイル可能なのです.
そのため,ArduinoISP.inoでSPISettingsが定義されると重複が起きてしまうのです.
そもそも何故、ソフトとハードを切り替えるの?
理由はコードのコメントに書いてあります。
Select hardware or software SPI, depending on SPI clock.
Currently only for AVR, for other architectures (Due, Zero,...), hardware SPI is probably too fast anyway.
とあるように,ある種類ではハードウェアSPIでは速すぎることがあるようです.
速すぎると,書き込み対象のMCUが対応できないのでしょうね.
そのため,ハードウェアSPIでは設定できない書き込み速度を使うために,最低速度が速すぎる場合はソフトウェアSPIに切り替えるようです.
ということで,Nano EveryはソフトウェアSPIに切り替える条件を満たしていたため,ソフトウェアSPIの実装が定義され,それが衝突しエラーが起きています.
Arduino Nano Every のSPI事情
では「Nano EveryではソフトウェアSPIを使わないといけないのか」というと,そんな訳でもありません.
そもそも,なぜ切り替える必要が在るかというとハードウェアSPI通信の最低速度が早すぎるためです.
例えばArduino Unoで用いられているATmega328では,CPUクロックに依存してSPI通信の周波数を選びます(19.5.1 SPCR – SPI Control Registerのtable19-5を参照1).このため最低となる書き込み速度がCPUクロックに依存して決定してしまいます.
このような理由でArudino UnoではソフトウェアSPI通信を使わざるを得なくなっています.
しかし,Nano Everyに用いられているATmega4809のデータシートを見てみますと,なんとSPI通信の周波数の最低値が見つかりません(32.13 SPIのTable 32-19を参照).
そのため,Nano Everyでは「最低値が速すぎてハードウェアSPIが使えない」なんてことはないようです.
したがって,ArduinoISP内のソフトウェアSPI実装あたりはガッツリ消して,ハードウェアSPIを使うようにしてやれば良いことになります.
LEDの個数問題
SPI通信の問題が解決できると,次にLEDの個数の問題になります.
Nano Everyで利用可能なLEDは限られており,ArduinoSPIで想定してる個数より少ないです.
そのためバッサリとLED関係のコードは消去しちゃいましょう!困っても書き込みの様子等がわからなくなるくらいですからね.
必要であれば適切なピン番号を設定して,LEDを光らせる回路を作りましょう.
まとめ
以上を踏まえて,必要最低限に切り詰めたのが次のとおりです.
(ほとんど、ArduinoISPと同じコード...)
#include "SPI.h"
#define SPI_CLOCK (1000000/6)
#define RESET 2
#define PIN_MOSI 11
#define PIN_MISO 12
#define PIN_SCK 13
#define BAUDRATE 19200
#define HWVER 2
#define SWMAJ 1
#define SWMIN 18
#define STK_OK 0x10
#define STK_FAILED 0x11
#define STK_UNKNOWN 0x12
#define STK_INSYNC 0x14
#define STK_NOSYNC 0x15
#define CRC_EOP 0x20
void setup() {
Serial.begin(BAUDRATE);
}
int error = 0;
int pmode = 0;
unsigned int here;
uint8_t buff[256];
#define beget16(addr) (*addr * 256 + *(addr+1) )
typedef struct param {
uint8_t devicecode;
uint8_t revision;
uint8_t progtype;
uint8_t parmode;
uint8_t polling;
uint8_t selftimed;
uint8_t lockbytes;
uint8_t fusebytes;
uint8_t flashpoll;
uint16_t eeprompoll;
uint16_t pagesize;
uint16_t eepromsize;
uint32_t flashsize;
} parameter;
parameter param;
static bool rst_active_high;
void reset_target(bool reset) {
digitalWrite(RESET, ((reset && rst_active_high) || (!reset && !rst_active_high)) ? HIGH : LOW);
}
void loop(void) {
if (Serial.available()) {
avrisp();
}
}
uint8_t getch() {
while (!Serial.available());
return Serial.read();
}
void fill(int n) {
for (int x = 0; x < n; x++) {
buff[x] = getch();
}
}
uint8_t spi_transaction(uint8_t a, uint8_t b, uint8_t c, uint8_t d) {
SPI.transfer(a);
SPI.transfer(b);
SPI.transfer(c);
return SPI.transfer(d);
}
void empty_reply() {
if (CRC_EOP == getch()) {
Serial.print((char)STK_INSYNC);
Serial.print((char)STK_OK);
} else {
error++;
Serial.print((char)STK_NOSYNC);
}
}
void breply(uint8_t b) {
if (CRC_EOP == getch()) {
Serial.print((char)STK_INSYNC);
Serial.print((char)b);
Serial.print((char)STK_OK);
} else {
error++;
Serial.print((char)STK_NOSYNC);
}
}
void get_version(uint8_t c) {
switch (c) {
case 0x80:
breply(HWVER);
break;
case 0x81:
breply(SWMAJ);
break;
case 0x82:
breply(SWMIN);
break;
case 0x93:
breply('S');
break;
default:
breply(0);
}
}
void set_parameters() {
param.devicecode = buff[0];
param.revision = buff[1];
param.progtype = buff[2];
param.parmode = buff[3];
param.polling = buff[4];
param.selftimed = buff[5];
param.lockbytes = buff[6];
param.fusebytes = buff[7];
param.flashpoll = buff[8];
param.eeprompoll = beget16(&buff[10]);
param.pagesize = beget16(&buff[12]);
param.eepromsize = beget16(&buff[14]);
param.flashsize = buff[16] * 0x01000000
+ buff[17] * 0x00010000
+ buff[18] * 0x00000100
+ buff[19];
rst_active_high = (param.devicecode >= 0xe0);
}
void start_pmode() {
reset_target(true);
pinMode(RESET, OUTPUT);
SPI.begin();
SPI.beginTransaction(SPISettings(SPI_CLOCK, MSBFIRST, SPI_MODE0));
digitalWrite(PIN_SCK, LOW);
delay(20);
reset_target(false);
delayMicroseconds(100);
reset_target(true);
delay(50);
spi_transaction(0xAC, 0x53, 0x00, 0x00);
pmode = 1;
}
void end_pmode() {
SPI.end();
pinMode(PIN_MOSI, INPUT);
pinMode(PIN_SCK, INPUT);
reset_target(false);
pinMode(RESET, INPUT);
pmode = 0;
}
void universal() {
uint8_t ch;
fill(4);
ch = spi_transaction(buff[0], buff[1], buff[2], buff[3]);
breply(ch);
}
void flash(uint8_t hilo, unsigned int addr, uint8_t data) {
spi_transaction(0x40 + 8 * hilo,
addr >> 8 & 0xFF,
addr & 0xFF,
data);
}
void commit(unsigned int addr) {
spi_transaction(0x4C, (addr >> 8) & 0xFF, addr & 0xFF, 0);
}
unsigned int current_page() {
if (param.pagesize == 32) {
return here & 0xFFFFFFF0;
}
if (param.pagesize == 64) {
return here & 0xFFFFFFE0;
}
if (param.pagesize == 128) {
return here & 0xFFFFFFC0;
}
if (param.pagesize == 256) {
return here & 0xFFFFFF80;
}
return here;
}
void write_flash(int length) {
fill(length);
if (CRC_EOP == getch()) {
Serial.print((char) STK_INSYNC);
Serial.print((char) write_flash_pages(length));
} else {
error++;
Serial.print((char) STK_NOSYNC);
}
}
uint8_t write_flash_pages(int length) {
int x = 0;
unsigned int page = current_page();
while (x < length) {
if (page != current_page()) {
commit(page);
page = current_page();
}
flash(LOW, here, buff[x++]);
flash(HIGH, here, buff[x++]);
here++;
}
commit(page);
return STK_OK;
}
#define EECHUNK (32)
uint8_t write_eeprom(unsigned int length) {
unsigned int start = here * 2;
unsigned int remaining = length;
if (length > param.eepromsize) {
error++;
return STK_FAILED;
}
while (remaining > EECHUNK) {
write_eeprom_chunk(start, EECHUNK);
start += EECHUNK;
remaining -= EECHUNK;
}
write_eeprom_chunk(start, remaining);
return STK_OK;
}
uint8_t write_eeprom_chunk(unsigned int start, unsigned int length) {
fill(length);
for (unsigned int x = 0; x < length; x++) {
unsigned int addr = start + x;
spi_transaction(0xC0, (addr >> 8) & 0xFF, addr & 0xFF, buff[x]);
delay(45);
}
return STK_OK;
}
void program_page() {
char result = (char) STK_FAILED;
unsigned int length = 256 * getch();
length += getch();
char memtype = getch();
if (memtype == 'F') {
write_flash(length);
return;
}
if (memtype == 'E') {
result = (char)write_eeprom(length);
if (CRC_EOP == getch()) {
Serial.print((char) STK_INSYNC);
Serial.print(result);
} else {
error++;
Serial.print((char) STK_NOSYNC);
}
return;
}
Serial.print((char)STK_FAILED);
return;
}
uint8_t flash_read(uint8_t hilo, unsigned int addr) {
return spi_transaction(0x20 + hilo * 8,
(addr >> 8) & 0xFF,
addr & 0xFF,
0);
}
char flash_read_page(int length) {
for (int x = 0; x < length; x += 2) {
uint8_t low = flash_read(LOW, here);
Serial.print((char) low);
uint8_t high = flash_read(HIGH, here);
Serial.print((char) high);
here++;
}
return STK_OK;
}
char eeprom_read_page(int length) {
// here again we have a word address
int start = here * 2;
for (int x = 0; x < length; x++) {
int addr = start + x;
uint8_t ee = spi_transaction(0xA0, (addr >> 8) & 0xFF, addr & 0xFF, 0xFF);
Serial.print((char) ee);
}
return STK_OK;
}
void read_page() {
char result = (char)STK_FAILED;
int length = 256 * getch();
length += getch();
char memtype = getch();
if (CRC_EOP != getch()) {
error++;
Serial.print((char) STK_NOSYNC);
return;
}
Serial.print((char) STK_INSYNC);
if (memtype == 'F') result = flash_read_page(length);
if (memtype == 'E') result = eeprom_read_page(length);
Serial.print(result);
}
void read_signature() {
if (CRC_EOP != getch()) {
error++;
Serial.print((char) STK_NOSYNC);
return;
}
Serial.print((char) STK_INSYNC);
uint8_t high = spi_transaction(0x30, 0x00, 0x00, 0x00);
Serial.print((char) high);
uint8_t middle = spi_transaction(0x30, 0x00, 0x01, 0x00);
Serial.print((char) middle);
uint8_t low = spi_transaction(0x30, 0x00, 0x02, 0x00);
Serial.print((char) low);
Serial.print((char) STK_OK);
}
void avrisp() {
uint8_t ch = getch();
switch (ch) {
case '0':
error = 0;
empty_reply();
break;
case '1':
if (getch() == CRC_EOP) {
Serial.print((char) STK_INSYNC);
Serial.print("AVR ISP");
Serial.print((char) STK_OK);
}
else {
error++;
Serial.print((char) STK_NOSYNC);
}
break;
case 'A':
get_version(getch());
break;
case 'B':
fill(20);
set_parameters();
empty_reply();
break;
case 'E':
fill(5);
empty_reply();
break;
case 'P':
if (!pmode)
start_pmode();
empty_reply();
break;
case 'U':
here = getch();
here += 256 * getch();
empty_reply();
break;
case 0x60:
getch();
getch();
empty_reply();
break;
case 0x61:
getch();
empty_reply();
break;
case 0x64:
program_page();
break;
case 0x74:
read_page();
break;
case 'V':
universal();
break;
case 'Q':
error = 0;
end_pmode();
empty_reply();
break;
case 0x75:
read_signature();
break;
case CRC_EOP:
error++;
Serial.print((char) STK_NOSYNC);
break;
default:
error++;
if (CRC_EOP == getch())
Serial.print((char)STK_UNKNOWN);
else
Serial.print((char)STK_NOSYNC);
}
}
-
しっかりと全文を読んだわけではないため、間違っていたら指摘お願いします。 ↩