目次
1. 前回のおさらいと補足
-
ROS2をIsaac SIMで連携させるにはROS2 BRIDGEを使う
- Isaac のシーン(今回は小屋)とROS2のTurtlebot3_Burgerのスケールが違う!
- Turtlebotはフロアにしっかり接地させていて正常に走行可能
- 空中に配置すると壁面に張り付く場合があります・・・
-
Action Graphのパラメータに注意
- 概ねチュートリアルの記載通りですが、一部自分の環境に合わせて書き換えが必要
- 個別に書き換える箇所は主にValueやPathまわり
-
チュートリアルを中断して再読み込み時は注意
- 念の為、WindowのExtensionがROS2 BRIDGEになっているか確認します。
- その後、保存したUSDファイルを読み込みます。
2. 各チュートリアルの注意点
2 ROS2 Cameras
-
こちらは1でTurtlebot3が走る事ができていれば特段トラブルはありませんでした。
- ROS,ROS2で使用したRvizを呼び出しだします。
- Rvizで呼び出す為に"ros2 topic list"で確実にrgbがいる事を確認します。

-
カメラの位置決めも上手く配置できるかと思います。
注意点
2.2.2. Build the Graph for a RGB publishe
のパラメータでカメラ名はご自身でつけた名前になる場合があると思います。
Get Prim Path、Constant Stringの値はご自分の命名している名前に変更します。
3 Constant String
要注意
Turtlebot3_Burgerと小屋のスケールが違うので、デフォルト値で設定するとレーダーが飛ばない(様に見える)です。
- レーダー照射パラメータを長めにとっていきます。
- ここは正直自分でも要修正ポイントでROS2だけの場合と比べて微妙でした。
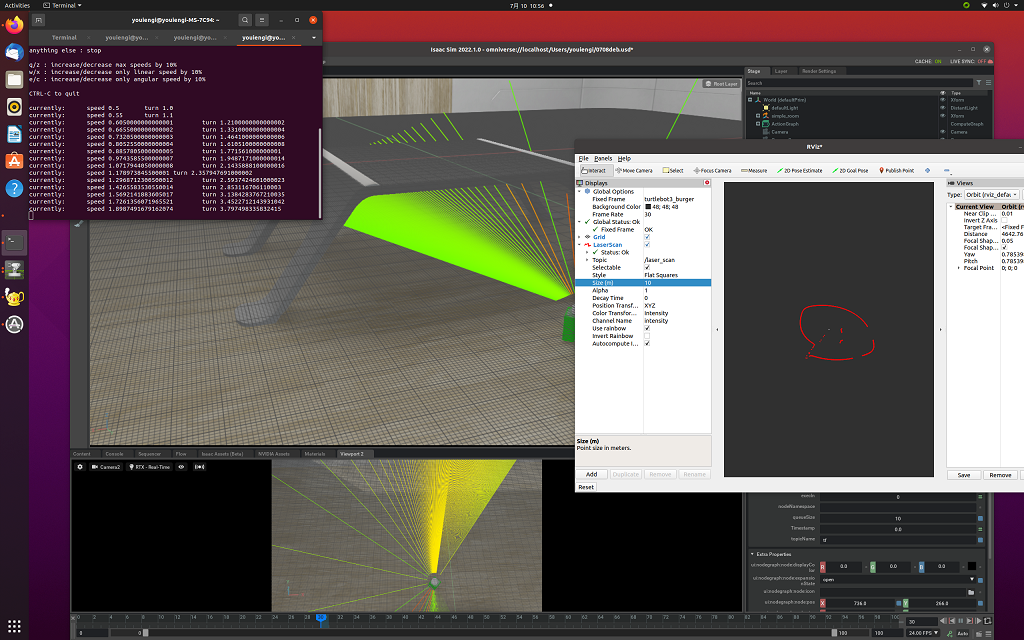
- このデータでは50mの照射距離を取っています。
4. ROS2 Transform Trees and Odometry
- こちらでは特段機能に影響がなく、設定したもののトラブルはありませんでした。
5. ROS2 Navigation
注意
いままで活躍してくれたTurtlebot3_Burgerですが、シレっとお役御免になっています
3. おまけ-ROS2Navigationさわり
注意
これまで使用してきたTurtlebot3_Burger進めると最終ステップのナビゲーションができません
- ROSやROS2を十分に使われている方ならご存知かと思いますが、これまで進めてきたワークスペースではROS2 Navigationに関する設定がされていません。
- 新たにワークスペースを作る等適切な対応が必要になります。
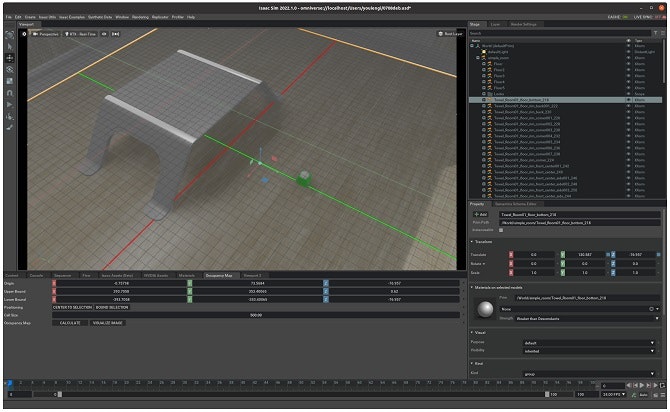
- 5.3.2. Occupancy Mapでマップ作成準備をする様子
- すんなりと室内のマップ完成。
- simple roomの様子になります。
4. 最後に
- ROS2などで優れた記事がありますので、そちらを元にROS2 BRIDGEでナビゲーションをできるようにしていこうと思います。