\textbf{D} = \textbf{E} + \Omega =
\begin{pmatrix}
\frac{\partial u}{\partial x} & \frac{\partial u}{\partial y} & \frac{\partial u}{\partial z} \\
\frac{\partial v}{\partial x} & \frac{\partial v}{\partial y} & \frac{\partial v}{\partial z} \\
\frac{\partial w}{\partial x} & \frac{\partial w}{\partial y} & \frac{\partial w}{\partial z}
\end{pmatrix}
前置き
Juliaでひずみテンソルを計算してみました。
専門家ではないので、間違っているところがあるかもしれません。
何か気づかれるところがありましたら、コメントお願いします。
環境
MacOS Mojave
Julia v1.0.3
相対変位テンソルとひずみテンソル
3次元空間上に与えられた2点$\textbf{r}_1$と$\textbf{r}_2$の相対変位からひずみテンソルを求める問題。
時刻 t における$\textbf{r}_1$と$\textbf{r}_2$の座標をそれぞれ
\textbf{r}_1(t)=
\begin{pmatrix}
x_1 \\
y_1 \\
z_1
\end{pmatrix}, \,
\textbf{r}_2(t)=
\begin{pmatrix}
x_2 \\
y_2 \\
z_2
\end{pmatrix}
とすると、2点間の距離$\textbf{r}(t)$は
\delta \textbf{r} = \textbf{r}_2(t) - \textbf{r}_1(t) =
\begin{pmatrix}
\delta x \\
\delta y \\
\delta z
\end{pmatrix}
また、時刻 t と時刻 t+1 の間に起こった点 $\textbf{r}_1$ の座標変化(変位)を
\textbf{u}(r_1,t) = \textbf{r}_1(t+1) - \textbf{r}_1(t)
とする。
2点間の相対変位を
\delta \textbf{u} = \textbf{u}(r_2,t) - \textbf{u}(r_1,t) =
\begin{pmatrix}
\delta u \\
\delta v \\
\delta w
\end{pmatrix}
とすると、
\delta \textbf{u} =
\begin{pmatrix}
\delta u \\
\delta v \\
\delta w
\end{pmatrix}
= \textbf{D} \,
\begin{pmatrix}
\delta x \\
\delta y \\
\delta z
\end{pmatrix}
= \textbf{D} \, \delta \textbf{r}
と書ける。
ここで、$\textbf{D}$は相対変位テンソルであり、
\textbf{D} =
\begin{pmatrix}
\frac{\partial u}{\partial x} & \frac{\partial u}{\partial y} & \frac{\partial u}{\partial z} \\
\frac{\partial v}{\partial x} & \frac{\partial v}{\partial y} & \frac{\partial v}{\partial z} \\
\frac{\partial w}{\partial x} & \frac{\partial w}{\partial y} & \frac{\partial w}{\partial z}
\end{pmatrix}
で求められる。
さらに、$\textbf{D}$は対称テンソル$\textbf{E}$と反対称テンソル$\Omega$で
\textbf{D} = \textbf{E} + \Omega
と分解することができる。ただし、
\textbf{E} = \frac{1}{2} (\textbf{D} + \textbf{D}^T) \\
\Omega = \frac{1}{2} (\textbf{D} - \textbf{D}^T)
である。
$\textbf{E}$がひずみテンソルであり、$\Omega$は回転を表すテンソルとなっている。
参考文献:
Juliaのコード
与えられた座標データからひずみテンソルを求める関数を実装。
$\partial$のところを$\delta$として考えて個々の要素を計算した。
function strain_tensor(r1_t1,r1_t2,r2_t1,r2_t2)
δr = r2_t1 - r1_t1
r1_δt = r1_t2 - r1_t1
r2_δt = r2_t2 - r2_t1
δu = r2_δt - r1_δt
D = kron(δu,1/(δr)) #相対変位テンソル
E = 1/2*(D+transpose(D)) #ひずみテンソル
Ω = 1/2*(D-transpose(D)) #回転のテンソル
return D,E,Ω
end
点$\textbf{r}_1$と$\textbf{r}_2$の時刻 t1 と時刻 t2 のそれぞれの座標を引数として、相対変位テンソル、ひずみテンソル、回転のテンソルを返す。
途中で使っているkronはテンソル積を求める関数。
A =
\begin{pmatrix}
x_a \\
y_a \\
z_a
\end{pmatrix}, \,
B =
\begin{pmatrix}
x_b & y_b & z_b
\end{pmatrix}
A \otimes B =
\begin{pmatrix}
x_ax_b & x_ay_b & x_az_b \\
y_ax_b & y_ay_b & y_az_b\\
z_ax_b & z_ay_b & z_az_b
\end{pmatrix}
A = [1.,2.,3.]
B = transpose([1.,4.,9.])
kron(A,B)
3×3 Array{Float64,2}:
1.0 4.0 9.0
2.0 8.0 18.0
3.0 12.0 27.0
例題
時刻 t=0 での2点の座標を
\textbf{r}_1(0) =
\begin{pmatrix}
0.0 \\
0.0 \\
0.0
\end{pmatrix}, \,
\textbf{r}_2(0) =
\begin{pmatrix}
0.2 \\
0.2 \\
0.2
\end{pmatrix}
時刻 t=1 での2点の座標を
\textbf{r}_1(1) =
\begin{pmatrix}
0.0 \\
0.0 \\
0.0
\end{pmatrix}, \,
\textbf{r}_2(1) =
\begin{pmatrix}
0.3 \\
0.35 \\
0.15
\end{pmatrix}
とし、このときのひずみテンソルを求める。
グラフを描くと
using Plots
gr()
r1_t1 = [0,0,0]
r1_t2 = [0,0,0]
r2_t1 = [0.2,0.2,0.2]
r2_t2 = [0.3,0.35,0.15]
xyz_t1 = [r1_t1 r2_t1]
xyz_t2 = [r1_t2 r2_t2]
plot(xyz_t1[1,:],xyz_t1[2,:],xyz_t1[3,:],lw=3)
plot!(xyz_t2[1,:],xyz_t2[2,:],xyz_t2[3,:],legend=:none,
xlims=(0.0,0.35),ylims=(0.0,0.35),zlims=(0.0,0.35),lw=3)
scatter!(xyz_t1[1,:],xyz_t1[2,:],xyz_t1[3,:],color="blue")
scatter!(xyz_t2[1,:],xyz_t2[2,:],xyz_t2[3,:],color="red")
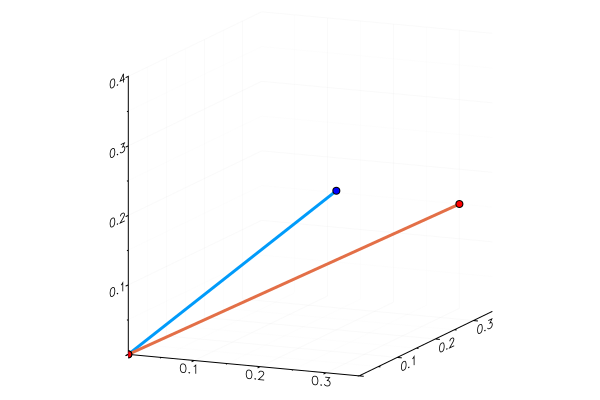
青が時刻 t=0 での2点を、赤が時刻 t=1 での2点を表す。
青から赤への変化をあらわすひずみテンソルを求めていく。
計算結果
function strain_tensor(r1_t1,r1_t2,r2_t1,r2_t2)
δr = r2_t1 - r1_t1
r1_δt = r1_t2 - r1_t1
r2_δt = r2_t2 - r2_t1
δu = r2_δt - r1_δt
D = kron(δu,1/(δr)) #相対変位テンソル
E = 1/2*(D+transpose(D)) #ひずみテンソル
Ω = 1/2*(D-transpose(D)) #回転のテンソル
return D,E,Ω
end
D,E,Ω = strain_tensor(r1_t1,r1_t2,r2_t1,r2_t2);
ひずみテンソル$\textbf{E}$の計算結果は
E
3×3 Array{Float64,2}:
0.166667 0.208333 0.0416667
0.208333 0.25 0.0833333
0.0416667 0.0833333 -0.0833333
回転のテンソル$\Omega$の計算結果は
Ω
3×3 Array{Float64,2}:
0.0 -0.0416667 0.125
0.0416667 0.0 0.166667
-0.125 -0.166667 0.0
となる。 Juliaは行列の出力が見やすくて良い感じ。
ひずみテンソル等から求められる各種パラメータも計算してみる。
using LinearAlgebra
print("体積膨張率は",round(tr(E),sigdigits=3),"\n\n")
print("x-y平面での回転は",round(Ω[2,1],sigdigits=3),"\n")
print("z-x平面での回転は",round(Ω[1,3],sigdigits=3),"\n")
print("y-z平面での回転は",round(Ω[3,2],sigdigits=3),"\n\n")
print("x-y平面でのひずみは",round(E[1,2],sigdigits=3),"\n")
print("z-x平面でのひずみは",round(E[1,3],sigdigits=3),"\n")
print("y-z平面でのひずみは",round(E[2,3],sigdigits=3),"\n")
体積膨張率は0.333
x-y平面での回転は0.0417
z-x平面での回転は0.125
y-z平面での回転は-0.167
x-y平面でのひずみは0.208
z-x平面でのひずみは0.0417
y-z平面でのひずみは0.0833
ちなみに、trは$Trace$(トレース)。Juliaの標準の関数ではないので注意。
LinearAlgebraをインポートして使う。