はじめに
授業で、Xtion Pro Live を使うタイミングがあったので,使い方まとめてみます!

Xtion 公式ホームページ,https://www.asus.com/jp/3D-Sensor/Xtion_PRO_LIVE/
githubにもあがってます!
https://github.com/Shunichi09/Qiita/tree/master/Xtion
目的
Xtion Pro Live の使い方の解説
ROS化とOpencvとの連携を軸に!
環境
- Xtion pro live
- Ubuntu 16.04 LTS
- Python 3.6.5
- OpenCV 3.3.1
- ROS Kinetic
まず用意すべきもの
ROSでXtionのような、USBカメラを使いたい場合は、
openni2
をインストールします
openniでもいいんですが、こっちの方がXtion pro liveにはみたいですね!
http://wiki.ros.org/openni2_launch
sudo apt-get install ros-kinetic-openni2
あとはopencv!!
pipでできます
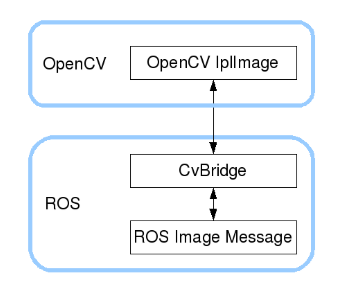
さらにROSイメージをopencvのイメージに変換するために、bridgeが以下の図のように必要になります
http://wiki.ros.org/cv_bridge
sudo apt-get update
sudo apt-get install python-cv-bridge
準備完了です!
OpenCVを用いて画面にカメラのRGB画像を表示させる
まずopenniを起動します
roslaunch openni2_launch openni2.launch
これで起動されました.
通常ただ表示させるだけなら
rosrun image_view image_view image:=/image_raw
このプログラムで表示できますが,これだけではopencv機能が使用できません
なので
cvbridgeを用いて変更して使えるようにします
# !/usr/bin/env python
# -*- coding: utf-8 -*-
# 動作確認済み
# roslaunch openni2_launch openni2.launch
import sys
import rospy
import cv2
import numpy as np
from std_msgs.msg import String
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import copy
class Xtion:
def __init__(self):
## ROS関係
# Publisher
self.image_pub = rospy.Publisher("image_topic", Image, queue_size=1)
# これは、ROS_imageをOpencv_imageに変換するのに必要
self.bridge = CvBridge()
# Subscriber
self.image_sub = rospy.Subscriber("/camera/rgb/image_raw", Image, self.callback)
def callback(self,data):# topicを受信するたびに、このコールバック関数が呼ばれる
# Topicの呼び出し
try:
self.cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
self.original_image = copy.copy(self.cv_image)
except CvBridgeError as e:
print('Cv_Bridge_Error')
# RGBからgrey_scaleに変換
gray_image = cv2.cvtColor(self.cv_image, cv2.COLOR_BGR2GRAY)
# 画面サイズ変更
# ウインドウのサイズを変更
half_image = cv2.resize(self.original_image, (0,0), fx=0.5, fy=0.5)
# ウインドウ表示
cv2.imshow("Origin Image", half_image)
cv2.imshow('Reasult Image', gray_image)
cv2.waitKey(3)
try:
self.image_pub.publish(self.bridge.cv2_to_imgmsg(half_image, "bgr8"))
except CvBridgeError as e:
print('CV_Bridge_Error')
def main(args):
xtion_disp = Xtion()
rospy.init_node('image_disp_pub', anonymous=True) # ノード立ち上げ
try:
rospy.spin()
except KeyboardInterrupt:
print("Shutting down")
cv2.destroyAllWindows()
if __name__ == '__main__':
main(sys.argv)
これで完了!
オリジナルの画像とグレー画像も表示されると思います
顔認識などのリアルタイム処理もこれでできます!
今度プログラムをあげます!
たぶんこんな感じになる

いろいろ隠してあるのはご理解ください
補足
上記に示した環境において!(他環境ではわかりません)
ROSとopenCVの混在にちょっとだけつまったので解説を
opencvを入れる時にROSがもともと入ってると,インストールされるのに
単にubuntuでpython3系で使いたいときにROSのPathが邪魔して,opencvが使えない(Pathが通らない)という問題が発生します
pythonの優先順位が勝手に変更されてるみたいですね
参考までに
つまり,ROS上でOpenCVを使う場合は何にも問題ないですが
単に,UbuntuPCでPython3系でopencvを使いたい場合,使えません
以下のエラーが出ると思います!
ImportError: /opt/ros/kinetic/lib/python2.7/dist-packages/cv2.so: undefined symbol: PyCObject_Type
ROSの方には入ってないよ!と怒られる...
なので単にUbuntuでpython3系でopencvを使用したい場合は,仕方ないので
以下のプログラムを追加してください
import sys
sys.path.remove('/opt/ros/kinetic/lib/python2.7/dist-packages')
import cv2
意外と海外の方も苦戦しているようでしたので,もし同じところで詰まった方の手助けになれれば幸いです