はじめに
こんにちは!
入門者(新入社員や転職者)向けモデルベース開発解説記事第5弾です。
今回はシミュレーション方法の1つであるHILS(Hardware In the Loop Simulation)について解説します。
HILSのHはHardware(実ECU)を意味します。
MILSと似ているので初心者は混乱すると思いますが、この記事を読むとHILSの概要、メリット、実施タイミングについて理解することができます。
(MILS HILS SILS PILSと新入社員時代は何のことかさっぱり理解できませんでした。)
HILSに限らずモデルベース開発を中心に組み込み系の情報をまとめたホームページを作成中です。よければ覗いてみてください。
モデルベース開発入門
HILSの概要
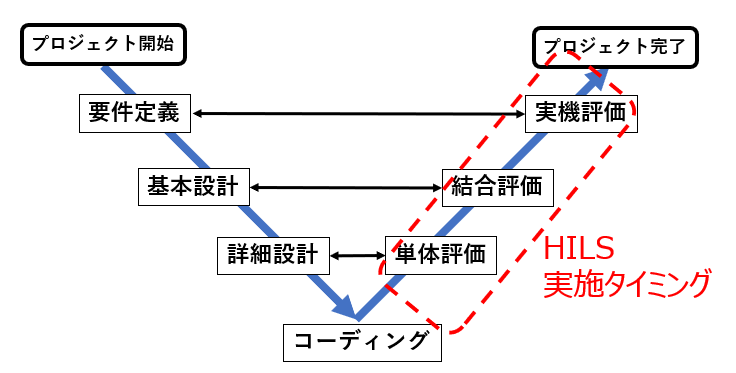
HILSとはHardware In the Loop Simulationの略で、実ECUとプラント(制御対象)を接続してのシミュレーション手法です。V字プロセス右側の検証工程効率化のために使用されます。複雑化する制御ソフトのテストを全て実機で行うことは現実的でなくなってきているので、検証工程を効率化するためにHILSの活用が進んでいます。
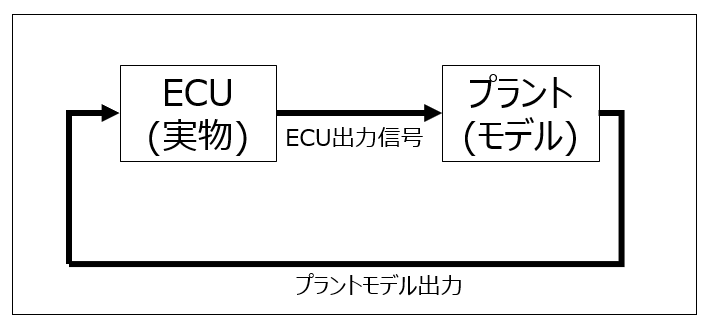
MILSがECUとプラント両者がモデルだったのに対し、HILSはECUが実物というのが特徴です。

HILSのメリット
メリット① 実ECUの検証が可能
MILSと異なりHILSでは本物のECUを使用して評価を行います。なので、MILSでは確認することのできなかった制御モデル以外の機能(ハンドコードで実装している箇所、通信処理、ハンドコードと制御モデルの情報受け渡し等)の検証が可能です。
メリット② 早期の動作確認が可能
MILS同様、本物の制御対象が必要ないので開発PJ早期に動作確認が行えます。
メリット③ 自動チェックが可能
人間が入力パターンを毎回手入力する必要がないので効率的に検証が可能です。
HILSで使用するプラントモデルについて
MILS同様SimscapeやAmesimなどプラントモデリングツールを用いてプラントモデルを作成します。作成したプラントモデルをリアルタイムシミュレーター(MathWorks社のSpeedgoatやdSPACE社のSCALEXIOなど)に書き込み、実ECUと接続してHILS環境を構築します。実ECUの評価を行うのでプラントモデルは実時間で動作する必要があります(実ECUは実時間で動作するので、プラントモデルも同様に動作する必要がある)。過剰に精度を求めて複雑にプラントモデルを作成すると実時間で動作せず、HILSが実行できなくなってしまうので注意が必要です。
HILSの実施タイミングについて
HILSは実物のECUとプラントモデルを使用しますので、実物のECUが完成するコーディング工程完了後から実施できます。最後の評価工程である実機評価工程でバグが発見されると大きな手戻りとなってしまうので、HILSを活用して単体評価工程もしくは結合評価工程で制御ソフトの信頼性を高めることにより開発プロジェクトを効率的に進めていきましょう。
まとめ
本ページではHILSについて解説しました。HILSを使用すると、実機レスで実ECUの評価が可能です。HILSを活用して効率的に開発業務を進めていきましょう。
HILSに限らずモデルベース開発を中心に組み込み系の情報をまとめたホームページを作成中です。よければ覗いてみてください。
モデルベース開発入門