レゴブロックでエレベーターを作ったV2
秋葉原ロボット部 熊秀創吉(熊吉らぼ)
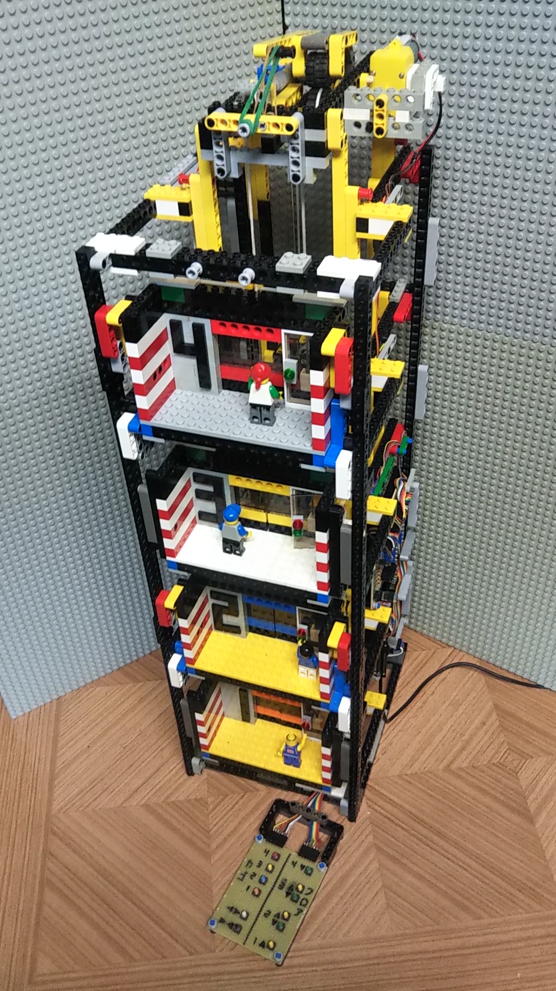
- レゴブロックのテクニック等で製作。
- 4階建てのエレベーターです。
- 昇降用、扉開閉用の2つのモータで動作します。
モーター (SparkFun ROB-13258)
https://www.sengoku.co.jp/mod/sgk_cart/detail.php?code=EEHD-53A4 - ScratchとNanoBoardAGを使い動作のプログラムで動作。
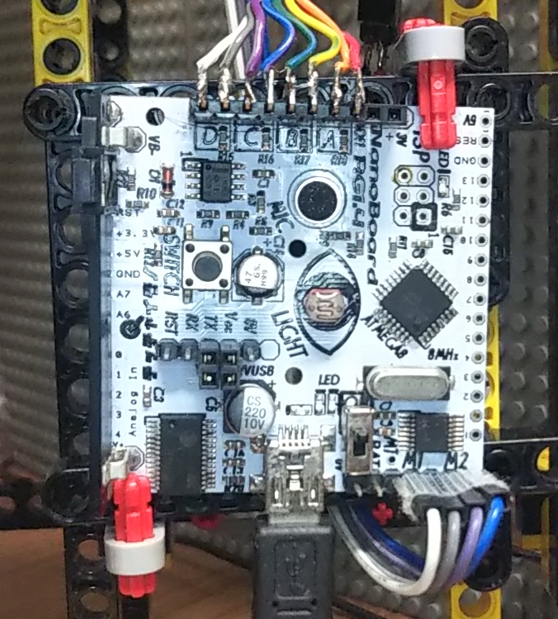
ちっちゃいものくらぶ:NanoBoardAG
https://tiisai.ddo.jp/?page_id=935
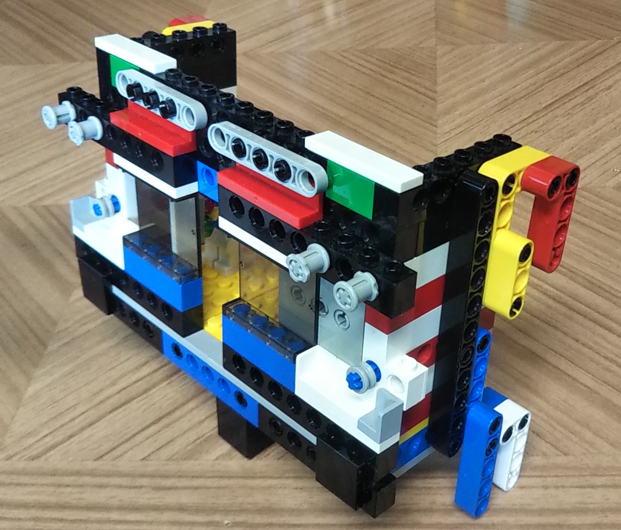
初期型との変更点
- カゴ側の扉が開いた時、当たらないように本体枠の幅を大きくした。
- メンテナンス用に4Fと2Fのフロアが取り外し可能とした。
- モーターはLEGO用ではなく模型用を使用しビニルチューブ接続とした。
- カゴとフロア側の扉や爪の位置等を変えた。
- SWや扉開閉検知、カゴ位置検知の接続は全てNanoBoardの抵抗センサー入力とした。
- 本体枠からカゴまでの配線の吊り下げを輪ゴムの連続結びからロープにした。
構成
- 概略図
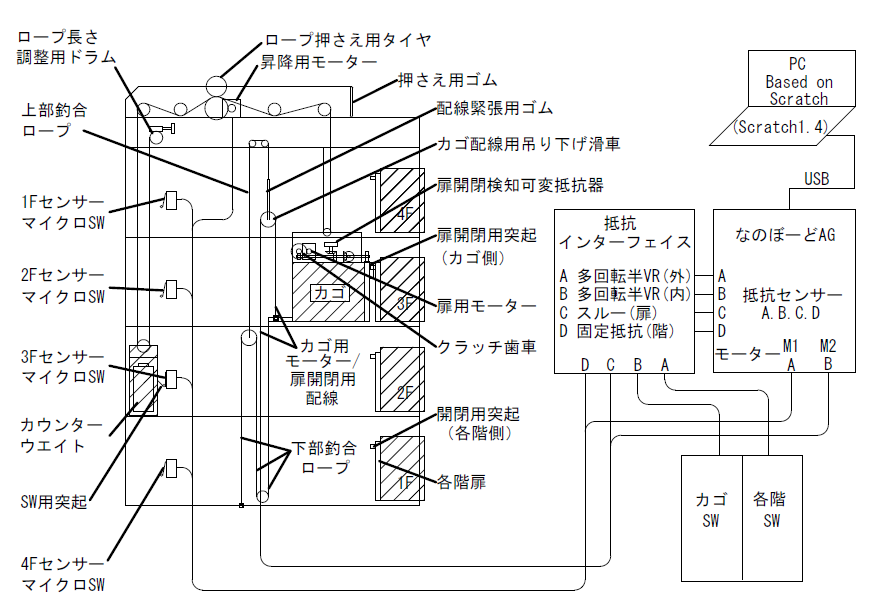
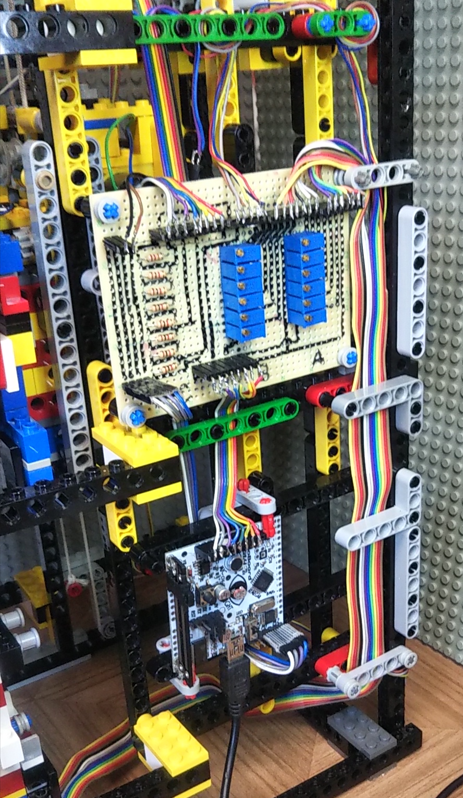
全体配線図
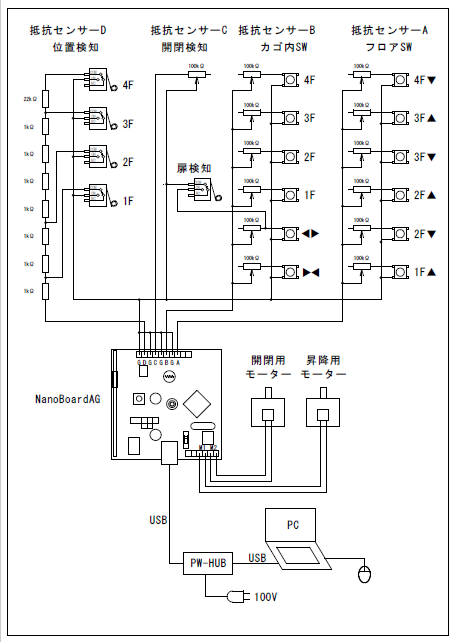
NanoBoardAGと抵抗インターフェイス
- 抵抗インターフェイスの固定抵抗と多回転半固定抵抗
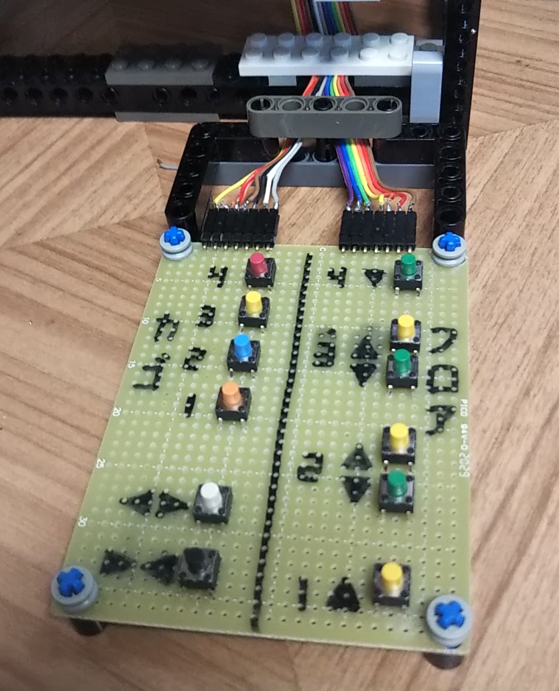
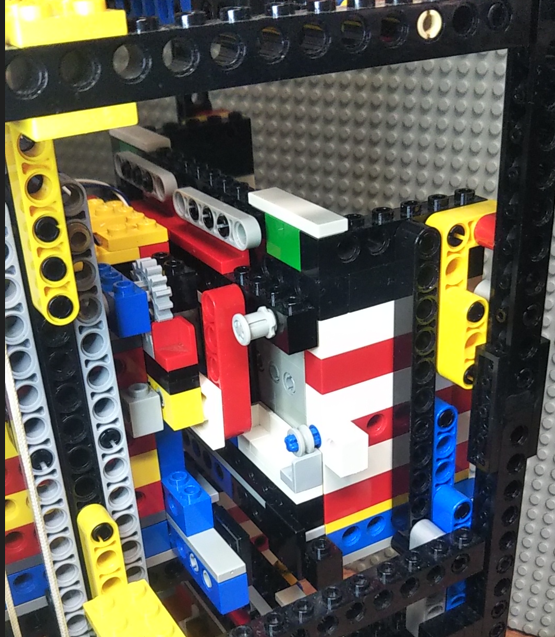
各フロアーとカゴ内のSW
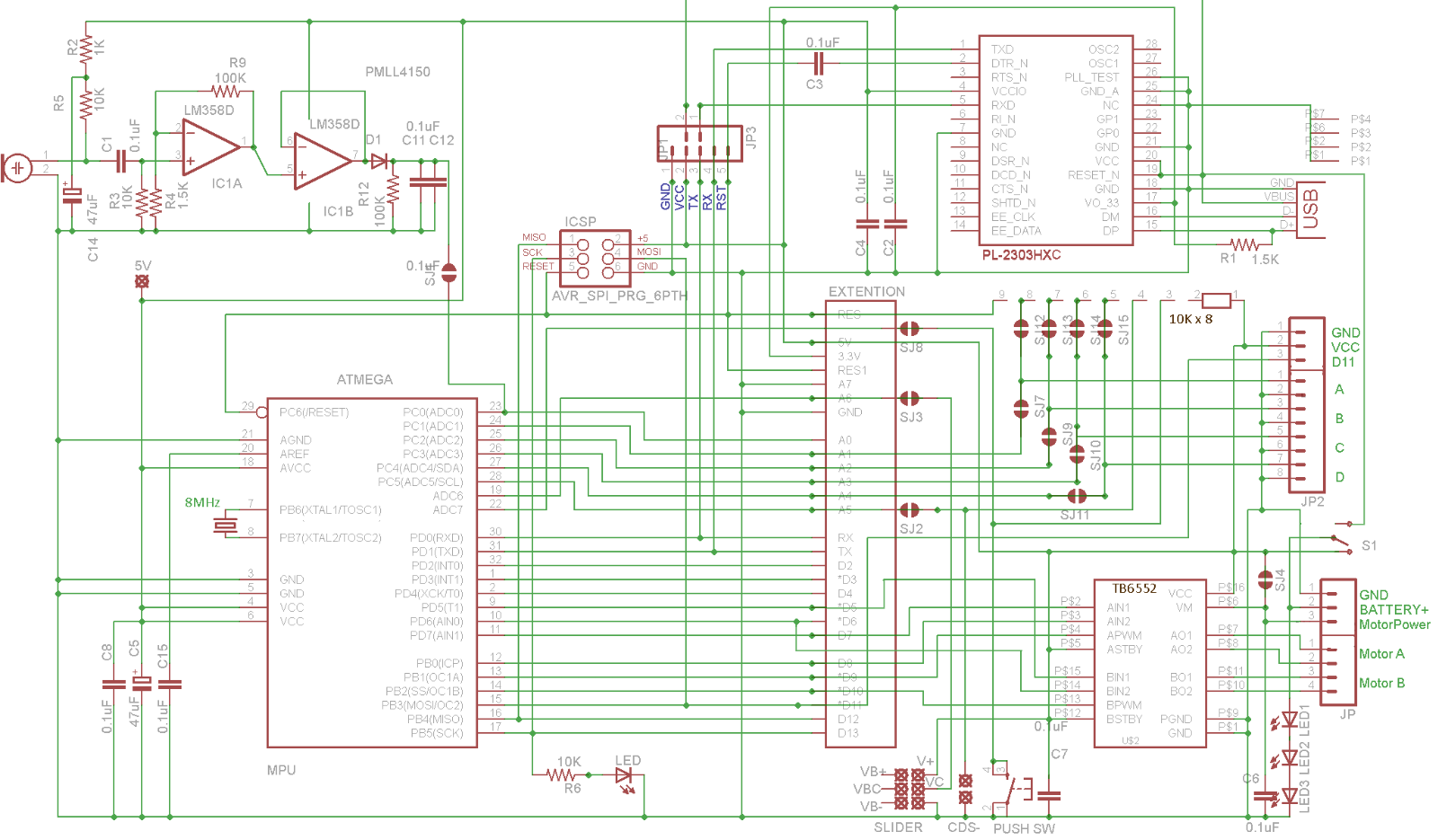
NanoBoardAG と 回路図
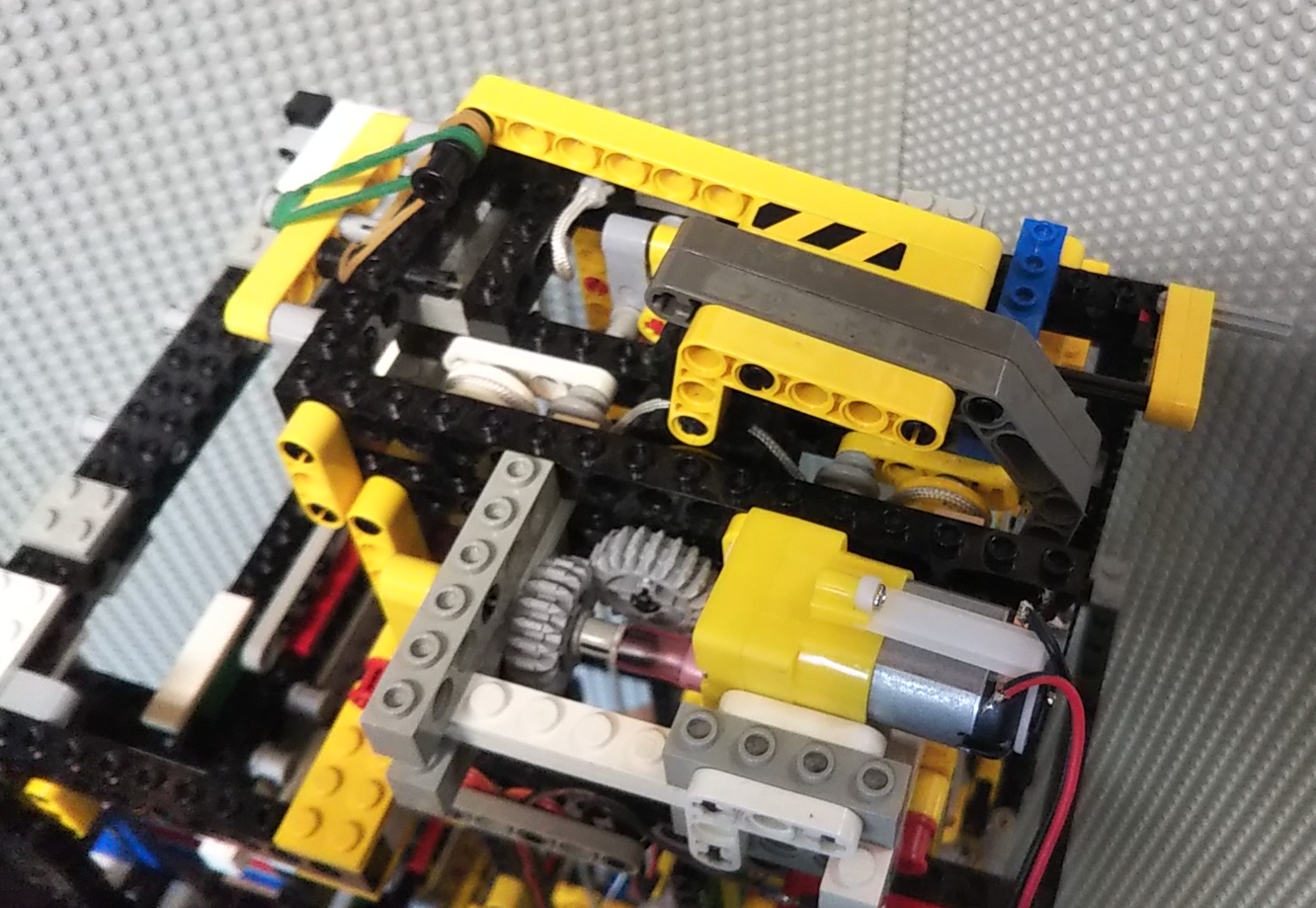
扉駆動機構
-
扉開閉検出回転VRと扉駆動モーター 及びカゴ位置検出用マイクロSW
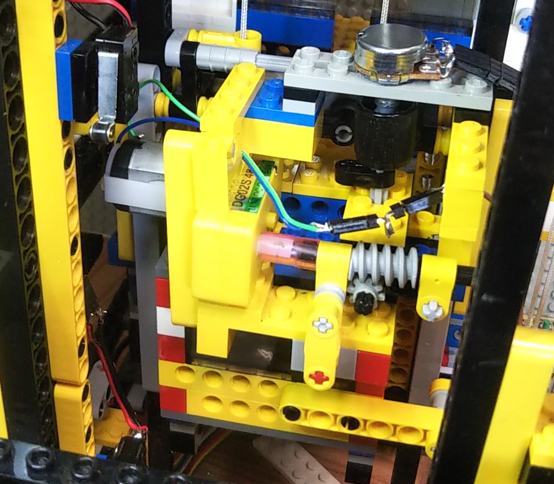
-
カゴ側の扉の両サイドのツノがフロア側の扉の爪の間に入る。
-
フロア側とカゴ側の間にある扉閉まり防止SWはカゴ側の「扉開」SWに接続。
-
フロア側の扉
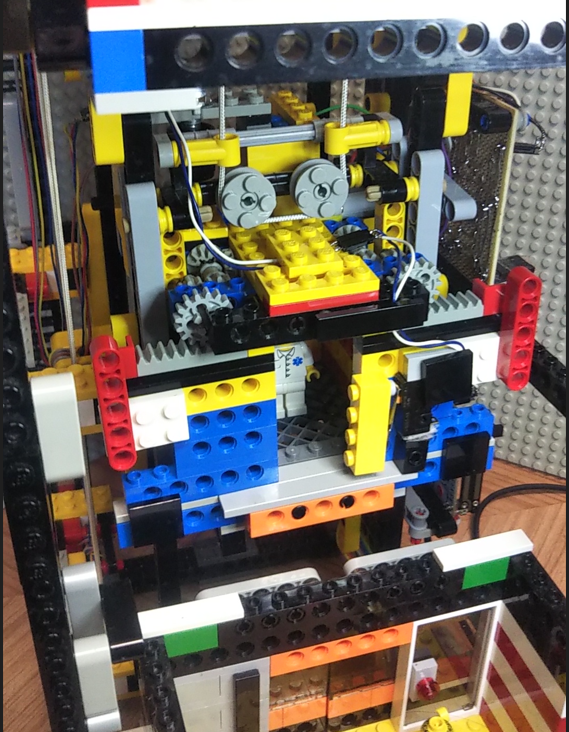
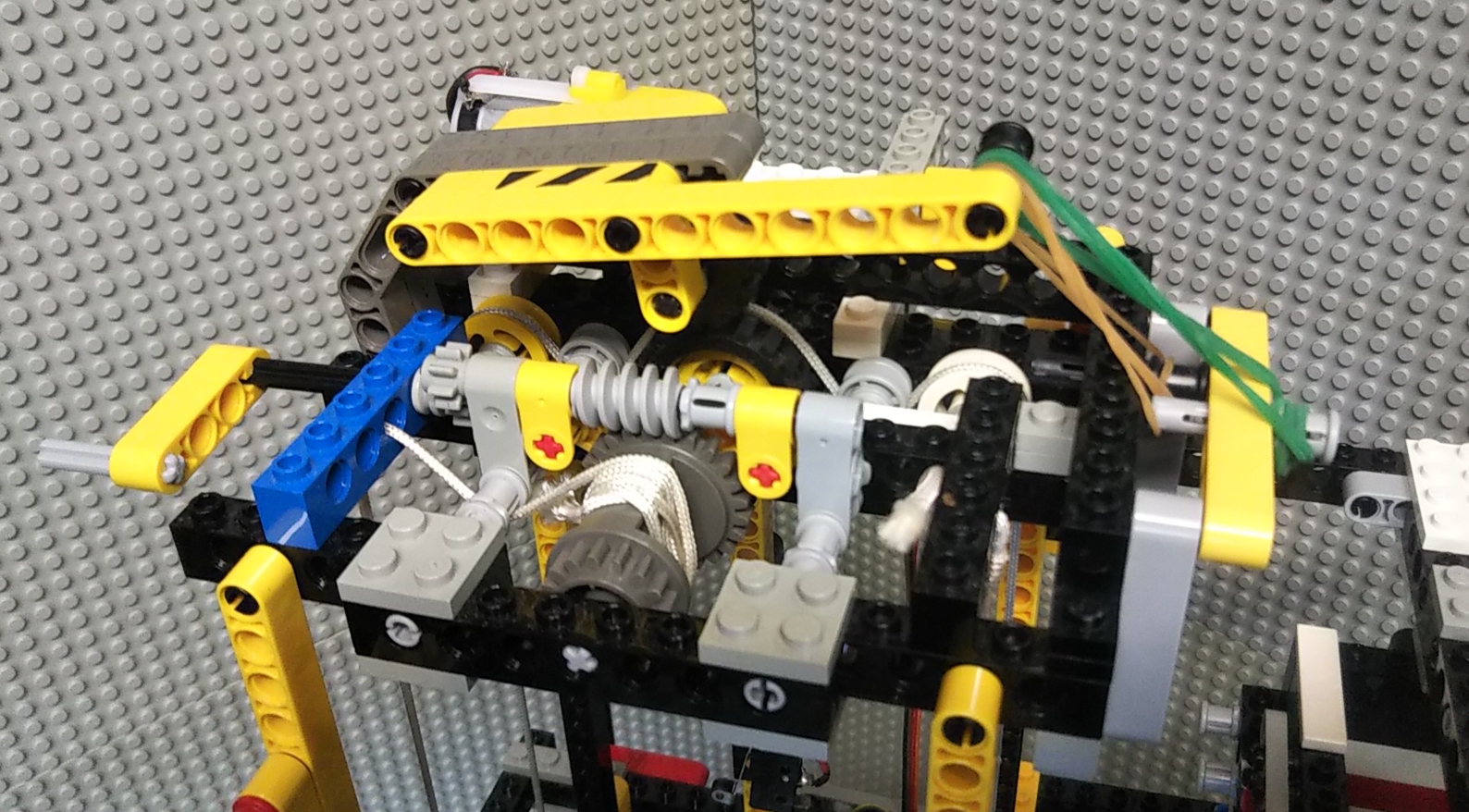
昇降メカ
-
輪ゴムはロープをタイヤで圧着させるためのもの。
-
ハンドルはカゴの床と各フロアの床を合わせた時、カウンタウエイト側にある爪がフロア検出SWに当たるように調整する為のもの。
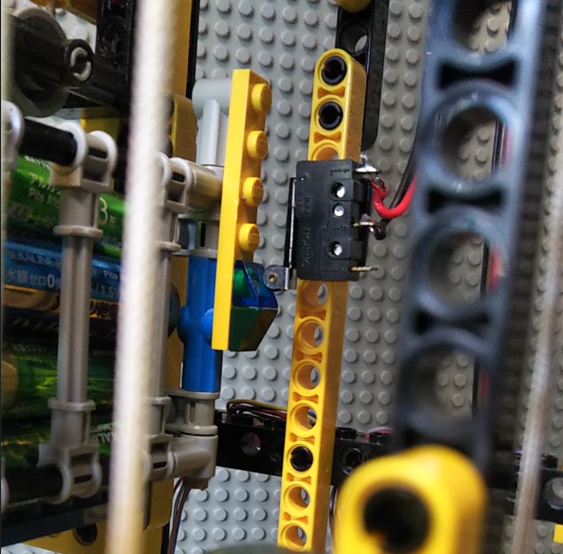
カウンターウェイト
-
ウエイトを単三電池で代用。

-
カゴ位置検出用マイクロSW用の爪を装備
本体からカゴまでのケーブル処理
- 上下に滑車使い輪ゴムはケーブルの緊張用に使用。

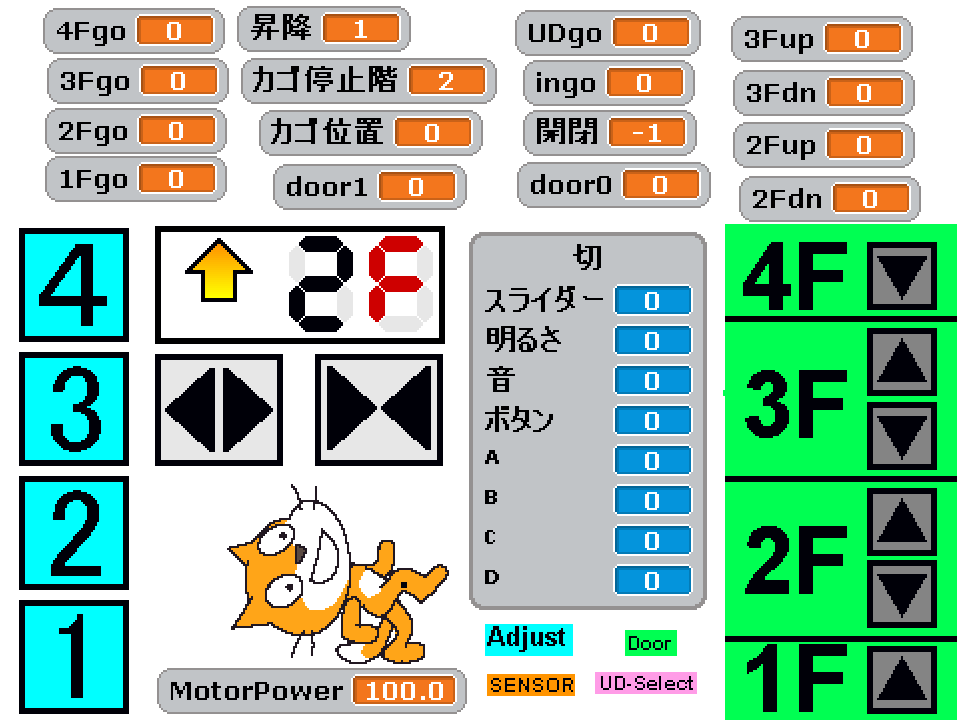
Scratchプログラム