はじめに
iOS8のSceneKitにおいて、IK(逆運動学)処理を行うためのクラスにSCNIKConstraintがあります。
これはSCNNodeとして配置されたモデルに対して拘束条件を加えるSCNConstraintのサブクラスとなっています。
ここではこのSCNIKConstraintの使い方について簡単に書きたいと思います。
3Dモデルの用意
まず、IKを組み込む対象となるボーンの入った3Dモデルを用意します。
今回はBlender 2.72を使い、以下のロボットアームのようなモデルを作りました。
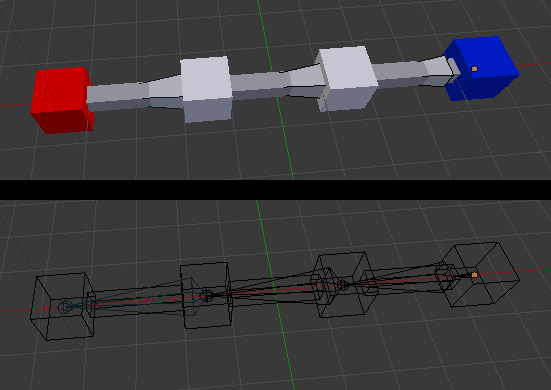
青い立方体を根、赤い立方体を末端としています。 全部で4本のボーンが入っており、それぞれモデルの対応する部分に紐づけられています。
(紐づけに関してはこちらのサイトを参考にさせて頂きました:自主練blender ハードボーン)
モデルが完成したらdae形式でエクスポートします。
実装
先ほど作成した3Dモデルのdaeファイルをプロジェクトにインポートします。
この時、モデルとボーンを含む親ノードを用意していなければ、用意してください。
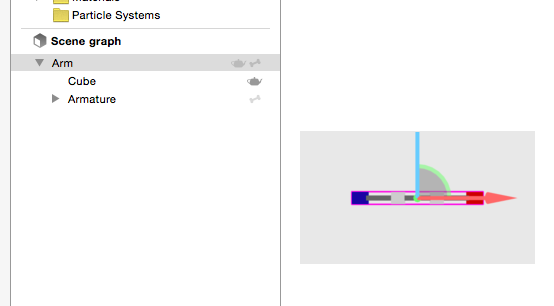
プロジェクトナビゲーター(ファイル一覧)からdaeファイルを選べば上のような画面になります。
daeファイルに記録されているシーンの中のノード一覧が見えますが、この左下に+ボタンがあり、これを押すことでノードを追加できます。 また、ノードを別なノードにドラッグすれば子ノードにすることもできます。
上記の画像では、「Arm」というノードを作り、そこにモデル本体(Cube)とボーン(Armature)を入れています。
daeファイルの準備が終わったらいよいよ実装です。
まず、IKで動かしたいボーンの根っこの部分(ここでは"RootBone"という名前だとします)を表すSCNNodeと、ボーンの先端部分(ここでは"BoneC"とします)を表すSCNNodeをそれぞれ用意します。
次にSCNIKConstraintのインスタンスを用意しますが、この時ボーンの根っこにあたるSCNNodeを指定する必要があるので、先ほどのRootBoneを表すSCNNodeのインスタンスを渡します。
最後に、ボーンの先端部分に拘束条件として用意したSCNIKConstraintのインスタンスを割り当て、influenceFactor(動きへの影響度)を1.0にして準備完了です。
実際に動かすためには、SCNIKConstraintのtargetPositionプロパティに目標位置を与えてやればOKです。
実際のコードは以下のようになります。
// 部位ごとのNodeの作成
SCNNode *arm_root = [arm childNodeWithName:@"RootBone" recursively:YES];
SCNNode *arm_end = [arm childNodeWithName:@"BoneC" recursively:YES];
// SCNIKConstraint:IKの用意
SCNIKConstraint *ik = [SCNIKConstraint inverseKinematicsConstraintWithChainRootNode:arm_root];
// モデルの末端に拘束条件として先ほど用意したIKを設定する
arm_end.constraints = @[ik];
// 影響度を設定
ik.influenceFactor = 1.0;
// 試しに動かしてみる
[SCNTransaction begin];
// 目標位置をSCNIKConstraintに与える
ik.targetPosition = [scene.rootNode convertPosition:SCNVector3Make(0,-1,0) toNode:nil];
[SCNTransaction commit];
サンプルコード
https://github.com/uedadaze/IKTest
SCNIKConstraintを利用したサンプルコードです。
画面内をタッチすると、位置に応じてモデルの先端が動くようになっています。
また、根っこと先端だけでなく逆運動に関わっている中間の各ノードの角度もとれるようになっています。