概要
ESP32-CAMで作るラジコン用のコードを公開します。
主な機能はカメラの映像送信とコマンドの受信によるGPIO出力の制御です。
機能的には以上のため、汎用的に使えるようになっています。
GPIO出力をするため、SDカードは使用できません。
ひとまず完成
— 亀吉 (@by2aE1WOPoBdfLo) January 23, 2023
カメラ見ながら動かすの楽しい!!
カメラに合わせて画角を変えられるようにコントローラーを改修
なんとか手のひらサイズに収まった#esp32 #Kotlin #ラジコン#マイコン pic.twitter.com/TiCrpCU5v2
ESP32-CAMで作ったラジコンの回路図は以下の記事で書いてます。
コントローラ公開しました。
仕様
通信の仕様
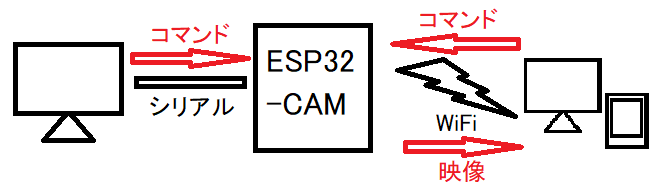
図の通り、WiFiで接続して映像受信及びコマンドの送信を操作端末側で行います。
映像はESP32-CAM標準のカメラサーバによる発信、コマンドの通信はUDPにて行います。
下記コードはアドホック通信を行います。
GPIOの動作検証のためにシリアルからのコマンド送信も可能です。
コマンドの仕様
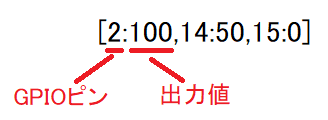
各GPIOの出力値を操作するためのコマンドです。
図の通り、コマンド全体を[](角カッコ)で囲み、カンマ区切りで指定します。:の左がGPIOのピンNO、右が値になります。
GPIO出力の仕様
GPIO出力はPWM出力です。コマンドで指定できる値は0〜255になります。
コード上部で定義しているgpio_pins[]にて使用するGPIOを指定します。出力として指定していないGPIOに対するコマンドは無視されます。
また、ESP32-CAMの仕様上、GPIO4はLEDに接続されています。なお、0を出力するとGNDに接続されます。
下記コードではGPIOの2,4,12,13,14,15を初期化し、12,13を使わないようにしています。原因は不明ですが、12,13を初期化しないと14,15が使えない現象が発生しました。(ボードの個体差か?コードが悪いのか?不明。指定するPINの順番もコレでないとダメ。)
コード
以下が自作したコードになります。定義した関数の概要は以下の通りです。
#include "esp_camera.h"
#include <WiFi.h>
#include "AsyncUDP.h"
int split(String data, char delimiter, String *dst);
void gpio_output(String pins[], String values[], int cmd_count);
void command_ditection(String d);
//
// WARNING!!! PSRAM IC required for UXGA resolution and high JPEG quality
// Ensure ESP32 Wrover Module or other board with PSRAM is selected
// Partial images will be transmitted if image exceeds buffer size
//
// Select camera model
//#define CAMERA_MODEL_WROVER_KIT // Has PSRAM
//#define CAMERA_MODEL_ESP_EYE // Has PSRAM
//#define CAMERA_MODEL_M5STACK_PSRAM // Has PSRAM
//#define CAMERA_MODEL_M5STACK_V2_PSRAM // M5Camera version B Has PSRAM
//#define CAMERA_MODEL_M5STACK_WIDE // Has PSRAM
//#define CAMERA_MODEL_M5STACK_ESP32CAM // No PSRAM
#define CAMERA_MODEL_AI_THINKER // Has PSRAM
//#define CAMERA_MODEL_TTGO_T_JOURNAL // No PSRAM
#include "camera_pins.h"
//const char* ssid = "*********";
//const char* password = "*********";
void startCameraServer();
//ESP32 SoftAP Configration
const char* ssid = "ESP32_Tester";
const char* pass = "password";
const IPAddress ip(192,168,0,100);
const IPAddress subnet(255,255,255,0);
// UDP通信
AsyncUDP udp;
const int RecvPort = 30000;
// GPIOピンの管理
// PINチャンネルとGPIOピンの関連付け
// IO4はフラッシュ
int gpio_pins[] = {12,13,15,14,2,4};
int pin_count = sizeof(gpio_pins) / sizeof(int);
void setup() {
Serial.begin(115200);
Serial.setDebugOutput(true);
Serial.println();
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
// if PSRAM IC present, init with UXGA resolution and higher JPEG quality
// for larger pre-allocated frame buffer.
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
#if defined(CAMERA_MODEL_ESP_EYE)
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
#endif
// GPIOの出力準備
for(int i = 0; i < pin_count; i++){
pinMode(gpio_pins[i], OUTPUT);
ledcSetup(i, 12000, 8);
ledcAttachPin(gpio_pins[i], i);
if(gpio_pins[i] == 15 or gpio_pins[i] == 14 or gpio_pins[i] == 2 or gpio_pins[i] == 4){
delay(50);
ledcWrite(i, 0);
}
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
sensor_t * s = esp_camera_sensor_get();
// initial sensors are flipped vertically and colors are a bit saturated
if (s->id.PID == OV3660_PID) {
s->set_vflip(s, 1); // flip it back
s->set_brightness(s, 1); // up the brightness just a bit
s->set_saturation(s, -2); // lower the saturation
}
// drop down frame size for higher initial frame rate
s->set_framesize(s, FRAMESIZE_QVGA);
#if defined(CAMERA_MODEL_M5STACK_WIDE) || defined(CAMERA_MODEL_M5STACK_ESP32CAM)
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
#endif
// WiFi.begin(ssid, password);
//
// while (WiFi.status() != WL_CONNECTED) {
// delay(500);
// Serial.print(".");
// }
// Serial.println("");
// Serial.println("WiFi connected");
//アドホックモードの設定
WiFi.softAP(ssid,pass);
Serial.print("ssid:");
Serial.print(ssid);
Serial.print("/pass:");
Serial.println(pass);
delay(100);
WiFi.softAPConfig(ip,ip,subnet);
IPAddress myIP = WiFi.softAPIP();
startCameraServer();
Serial.print("Camera Ready! Use 'http://");
// Serial.print(WiFi.localIP());
Serial.print(myIP);
Serial.println("' to connect");
// UDPServer 受信待ち
if(udp.listen(RecvPort)) {
Serial.print("UDP Listening on Port: ");
Serial.println(RecvPort);
udp.onPacket([](AsyncUDPPacket packet) {
Serial.print("UDP Packet Type: ");
Serial.print(packet.isBroadcast()?"Broadcast":packet.isMulticast()?"Multicast":"Unicast");
Serial.print(", From: ");
Serial.print(packet.remoteIP());
Serial.print(":");
Serial.print(packet.remotePort());
Serial.print(", To: ");
Serial.print(packet.localIP());
Serial.print(":");
Serial.print(packet.localPort());
Serial.print(", Length: ");
Serial.print(packet.length());
Serial.print(", Data: ");
Serial.write(packet.data(), packet.length());
Serial.println();
//reply to the client
// packet.printf("Got %u bytes of data", packet.length());
// コマンド解析
byte* bdata = packet.data();
bdata[packet.length()] = '\0';
String d = String((char*)bdata);
//Serial.println("debug:" + d);
command_ditection(d);
});
}
}
void loop() {
// put your main code here, to run repeatedly:
delay(100);
if(Serial.available()){
char s[255];
int i = 0;
while(Serial.available()){
s[i] = Serial.read();
i++;
}
s[i] = '\0';
Serial.print("Serial read:");
Serial.print(s);
String d = String((char*)s);
// コマンド解析及び実行
command_ditection(d);
}
//Send broadcast
//udp.broadcast("Anyone here?");
}
void command_ditection(String d){
// []内のデータを取得
String d2 = d.substring(d.indexOf("[") + 1, d.indexOf("]"));
//Serial.println("debug:" + d2);
// ,で分割
String cmds[10] = {"\0"};
String pins[10] = {"\0"};
String values[10] = {"\0"};
int count = split(d2, ',', cmds);
// コマンド分処理
int cmd_count = 0;
for(int i = 0; i < count; i++){
// コマンドのPIN_NOと値を取得
String pp[2] = {"\0"};
if((split(cmds[i], ':', pp)) != -1){
pins[cmd_count] = pp[0];
values[cmd_count] = pp[1];
cmd_count++;
//Serial.println("debug:cmd_" + String(cmd_count - 1) + " pin_" + pins[cmd_count - 1] + "/value_" + values[cmd_count - 1]);
}
}
// GPIO出力
gpio_output(pins, values, cmd_count);
}
void gpio_output(String pins[], String values[], int cmd_count){
for(int i = 0; i < cmd_count; i++){
for(int i2 = 0; i2 < pin_count; i2++){
if(pins[i].toInt() == gpio_pins[i2]){
ledcWrite(i2, values[i].toInt());
}
}
}
}
int split(String data, char delimiter, String *dst){
int index = 0;
int arraySize = (sizeof(data)/sizeof((data)[0]));
int datalength = data.length();
for (int i = 0; i < datalength; i++) {
char tmp = data.charAt(i);
if ( tmp == delimiter ) {
index++;
if ( index > (arraySize - 1)) return -1;
}
else dst[index] += tmp;
}
return (index + 1);
}