ロボット開発のデバッグにコントローラーを使いたくて、何か良いの無いかと探しておりました。
はじめは、iBUFFALO USBゲームパッド SFC風 とか良いかなと考えていたのですが、
Joy-ConがBluetooth接続で簡単に使用できると聞いて、Joy-Conへ方向転換。
PythonのPygameを用いて簡単に検出できたので、手順を以下にメモ。
① Joy-ConをBluetooth接続モードへ移行

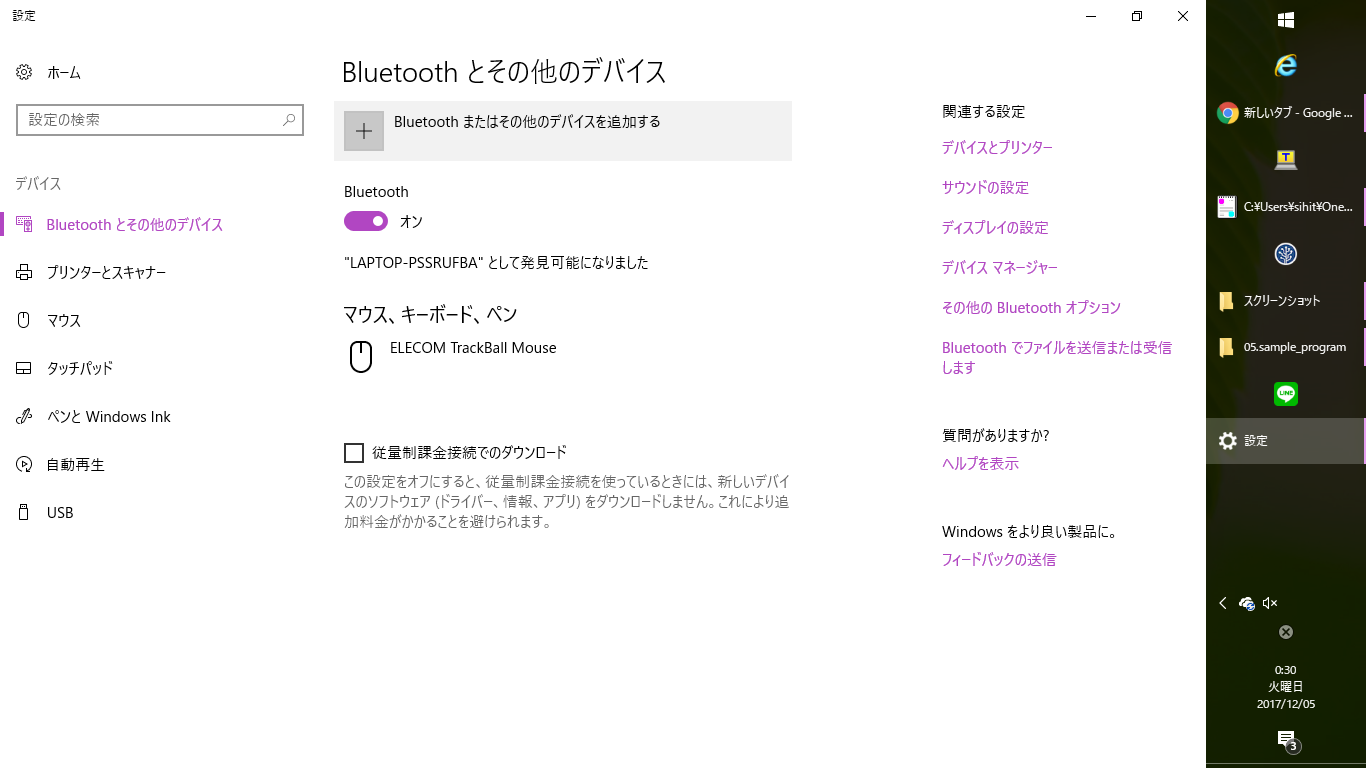
②-1 Windows側でBluetooth機器を検出
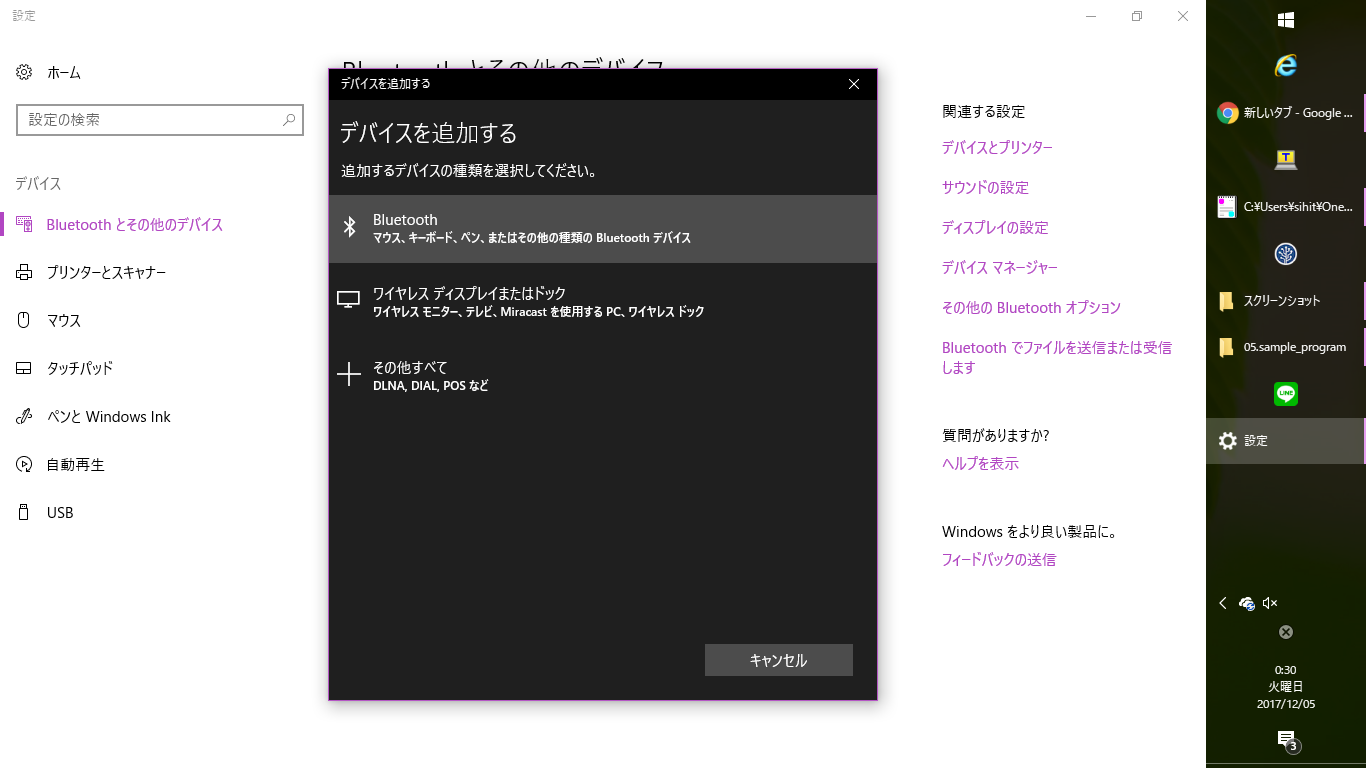
②-2 Windows側でBluetooth機器を検出
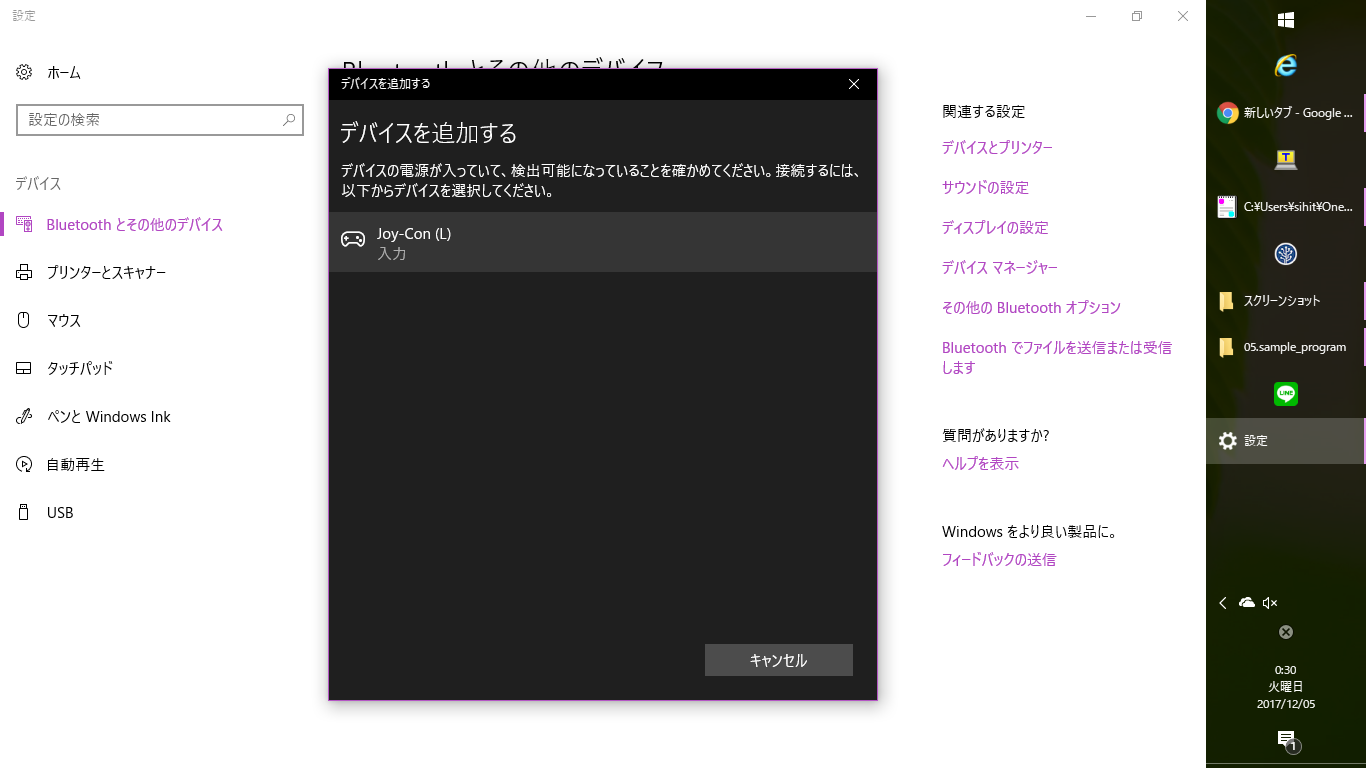
②-3 Windows側でBluetooth機器を検出
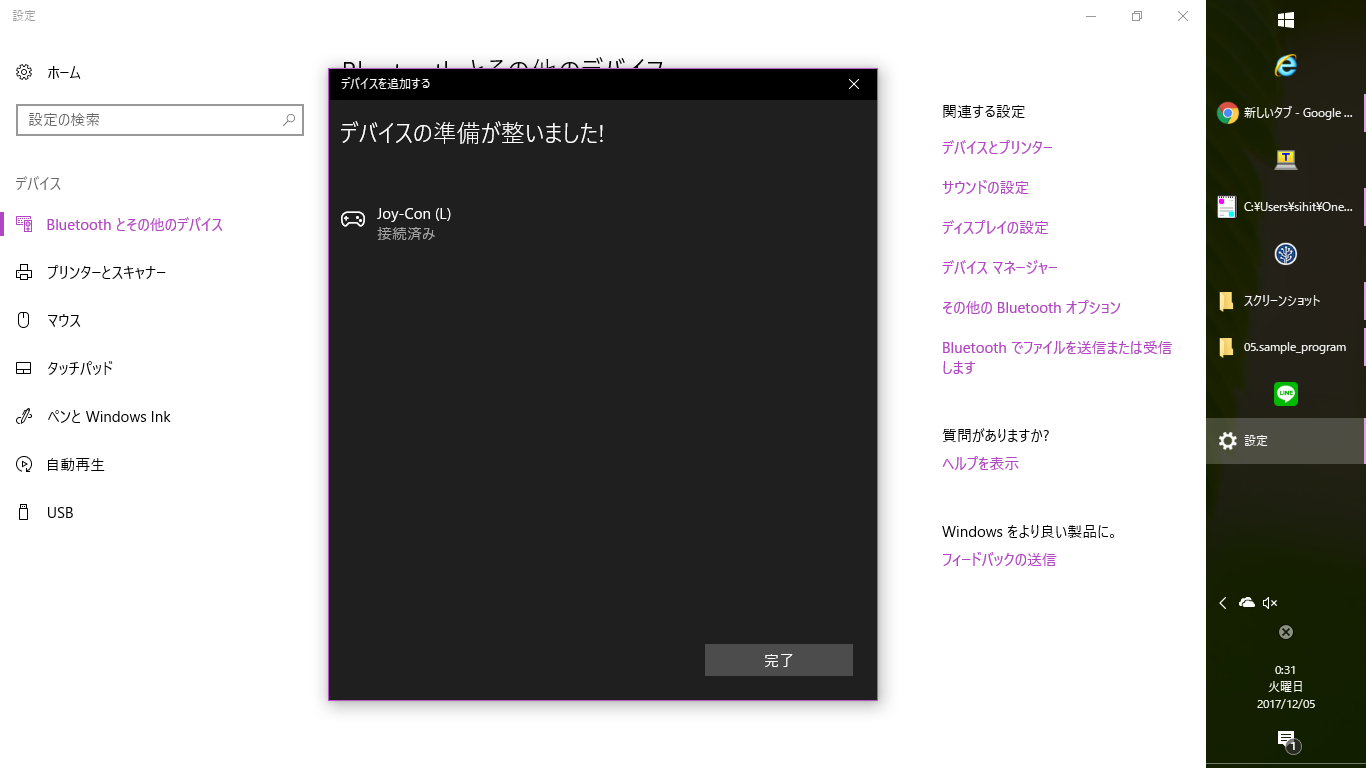
②-4 Windows側でBluetooth機器を検出
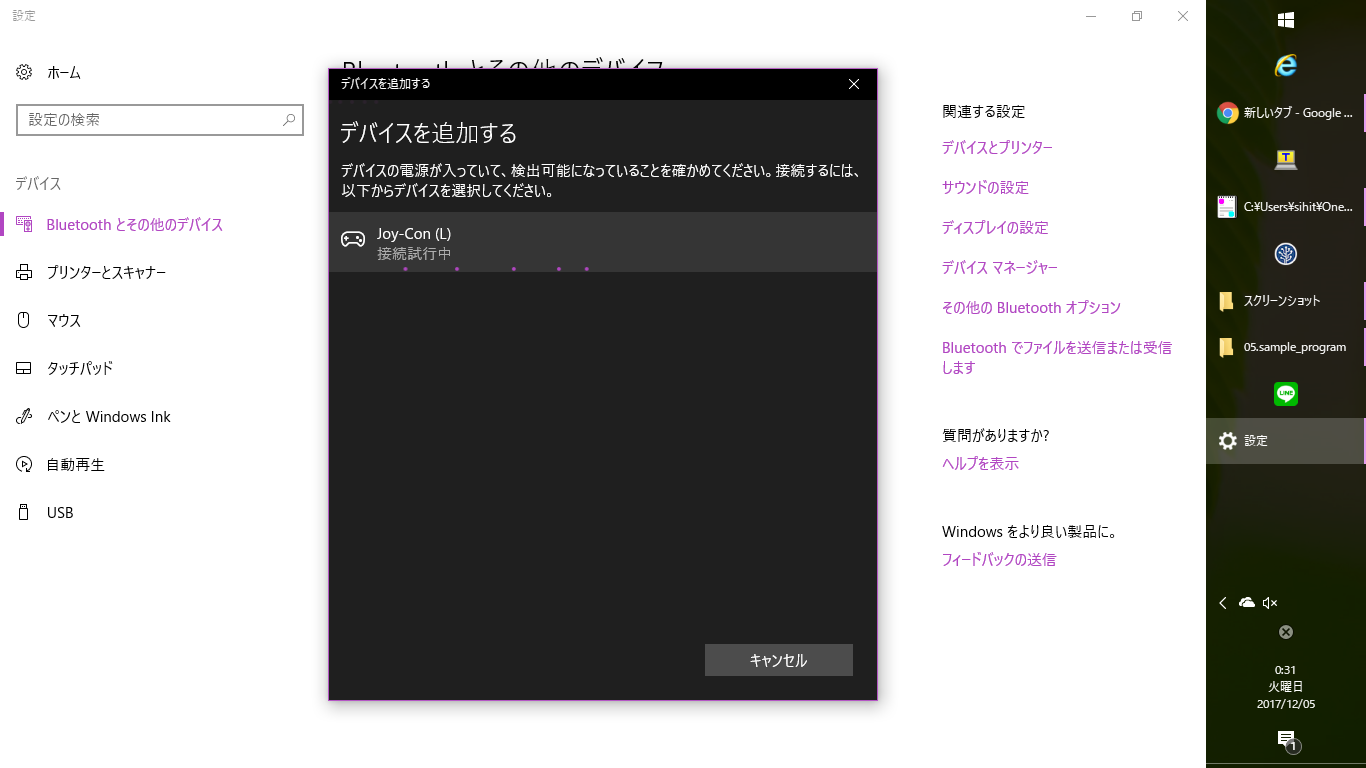
②-5 Windows側でBluetooth機器を検出
実際に検出してみたところの動画は以下。
https://www.youtube.com/watch?v=UiDuYm2suMk

スティックは、ハットスイッチとして検出するようで、以下のような割り付けになっておりました(横向き持ちの場合)
スティック左倒し:ハットスイッチ X軸 -1
スティック右倒し:ハットスイッチ X軸 1
スティック上倒し:ハットスイッチ Y軸 1
スティック下倒し:ハットスイッチ Y軸 -1
SL:ボタン 4
SR:ボタン 5
L :ボタン 14
ZL:ボタン 15
十字キー 左:ボタン 2
十字キー 右:ボタン 1
十字キー 上:ボタン 3
十字キー 下:ボタン 0
- :ボタン 8
キャプチャーボタン :ボタン 13
モーションIRカメラ、NFC、加速度センサー、ジャイロセンサーとかスティックの微妙な倒し具合 は検出できない模様。
HD振動とか指示出来たら、色々楽しめそうですが、今のところ操作出来るか不明。
ソースコードは以下。
# !/usr/bin/env python
# -*- coding: utf-8 -*-
import pygame
from pygame.locals import *
import time
def main() :
pygame.joystick.init()
joystick0 = pygame.joystick.Joystick(0)
joystick0.init()
print 'joystick start'
pygame.init()
while True:
# コントローラーの操作を取得
eventlist = pygame.event.get()
# イベント処理
for e in eventlist:
if e.type == QUIT:
return
if e.type == pygame.locals.JOYAXISMOTION:
x, y = joystick0.get_axis(0), joystick0.get_axis(1)
print 'axis x:' + str(x) + ' axis y:' + str(y)
elif e.type == pygame.locals.JOYHATMOTION:
x, y = joystick0.get_hat(0)
print 'hat x:' + str(x) + ' hat y:' + str(y)
elif e.type == pygame.locals.JOYBUTTONDOWN:
print 'button:' + str(e.button)
time.sleep(0.1)
if __name__ == '__main__':
try:
main()
except pygame.error:
print 'joystickが見つかりませんでした。'
以上。