前回の記事でROS2の環境構築を行いました。
今回は予告通り、公式のチュートリアルを見ていこうと思います。
指摘等あればお願いします。
その前に
前回の環境構築はこちらを参考に行いました。
しかし、この方法ではデモの実行ファイルだけがインストールされてしまい、ソースコードを見るためには、ソースコードからビルドしたROS2環境が必要だったので環境構築をやり直しました。
以下はBuilding ROS2 on Linuxの「How to setup the development environment?」まで出来た人向けの記事となります。
ROS2のデモを動かす準備
ROSでもお馴染みのワークスペースを作っていきます。
$ mkdir -p ~/ros2_ws/src
ここではsrcの親ディレクトリ、つまりros2_wsが名前通りワークスペースとなります。
次に、githubからros2.reposというファイルを落とします。
$ wget https://raw.githubusercontent.com/ros2/ros2/master/ros2.repos
このファイルの中身を少し読んでみると、repositoriesという文字や、git、urlなどが書かれていることがわかります。
これはgitから落とす内容をまとめたもので、以下のコマンドで、まとめてダウンロードできます。
$ vcs import ~/ros2_ws/src < ros2.repos
ビルドして実行
ビルドコマンドは以下
$ src/ament/ament_tools/scripts/ament.py build --build-tests --symlink-install
ビルドでエラーがなければ準備が出来たので、実行してみましょう。
端末を立ち上げ、以下を順に入力
$ cd ~/ros2_ws/
$ . install/local_setup.bash
$ ros2 run demo_nodes_cpp listener
もうひとつ端末を立ち上げ、以下を入力
$ cd ~/ros2_ws/
$ . install/local_setup.bash
$ ros2 run demo_nodes_cpp talker
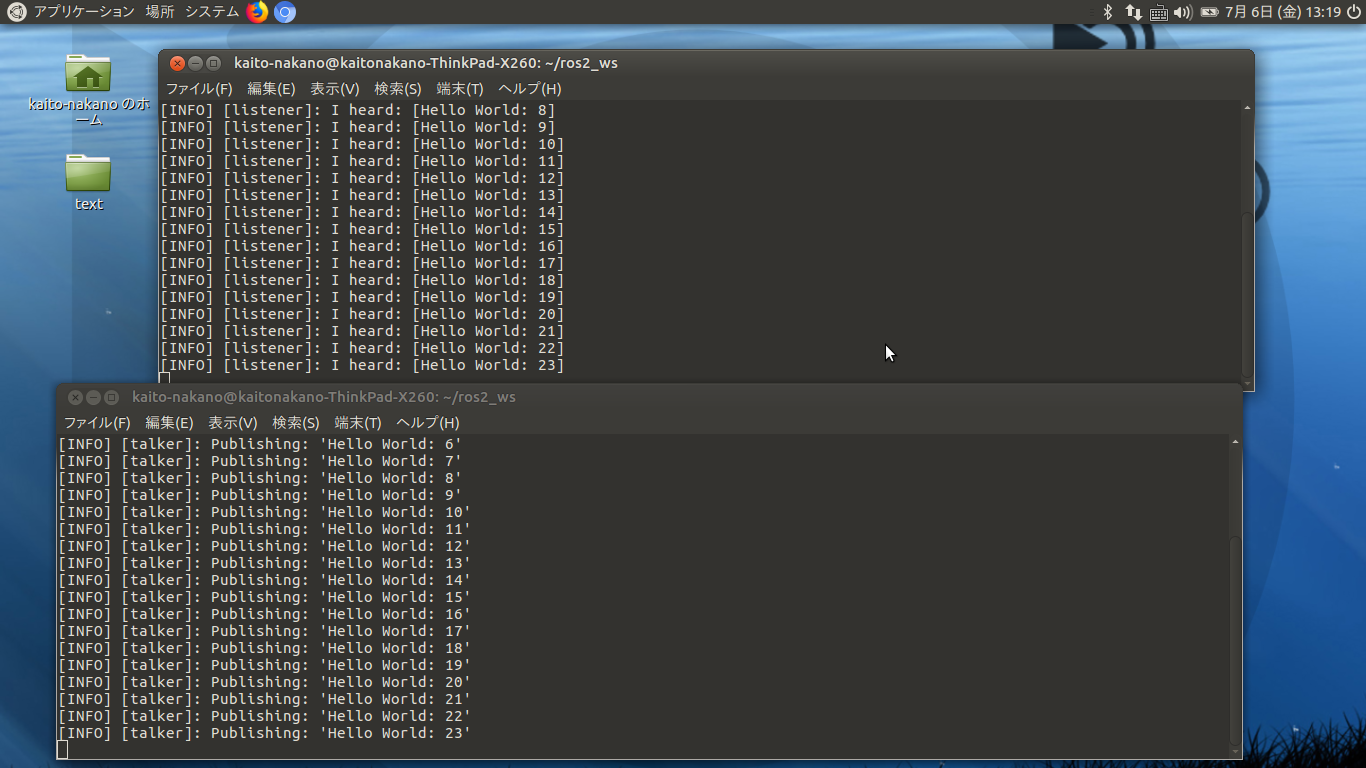
上のような表示が確認できれば成功です。
終わりに
今回実行したdemo_nodes_cppのパッケージは~/ros2_ws/src/ros2/demos/にあります。良かったら読んでみてください。