今回は前回に引き続き、ROSチュートリアルの4.ROSのパッケージをビルドする。に取り組んでいきたいと思います。
1.パッケージをビルドする
なるほどなるほど、catkin_makeは使えるってことね(あまりわかってない)
5.ROSのノードを理解する
4のチュートリアルはあまりボリュームがなかったため、今回は一つの記事で5に突入したいと思います。
0.1準備:ros_tutorialsのインストール
これは実行したけれど既にインストールされていた模様。過去の自分、やるやん。
0.1グラフ概念についての手っ取り早いおさらい
Nodes,Topics,Messages,Master,rosout,roscoreは話せるようにしよう。
0.1ノード
rosnode list
でアクティブなノードのリストを表示してくれると。なるほど。でそこからさらに情報が見たかったら、
rosnode info <nodeの名前>
で情報が見られると。なるほど。
0.1 rosrunの使い方
rosrun [package_name] [node_name]
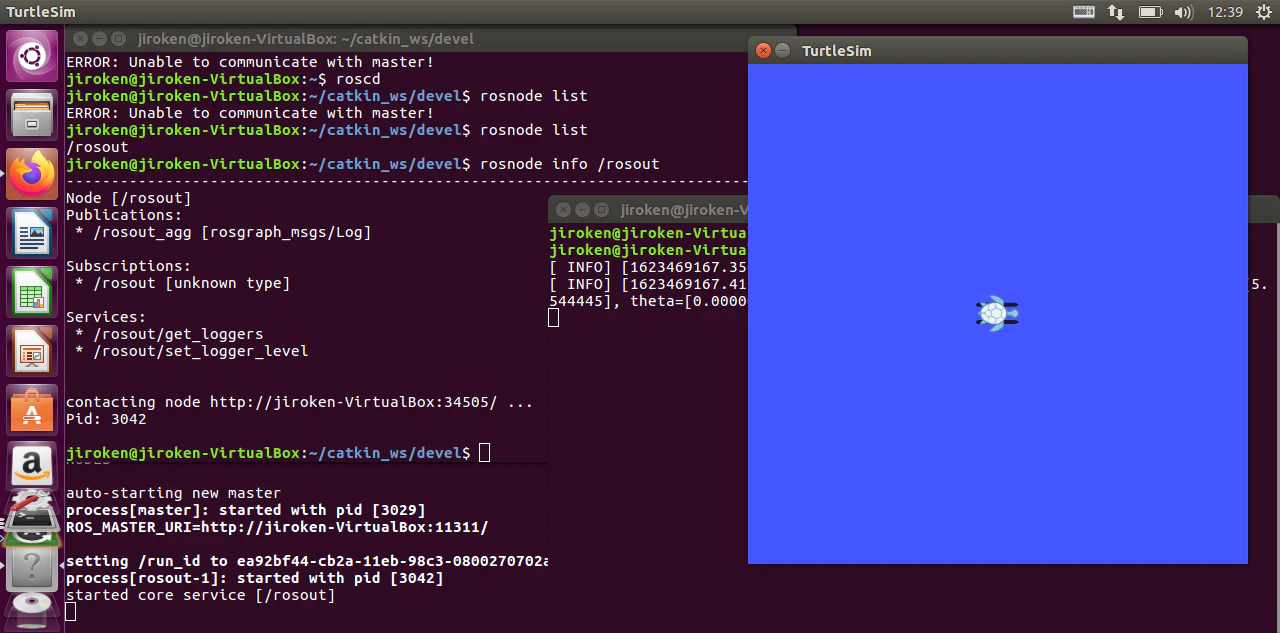
お!!出た!感動!
では次にリマップ引数を使ってみるか!
と思って意気込んだものの、/my_turtleじゃなくて、turtlesimのままだな。みた感じ、/turtlesimで始まっちゃってるから、引数がうまく与えられていないっぽい。そこでもう一回チュートリアルのコマンドをよくみた。
rosrun turtlesim turtlesim_node __name:=myturtle
って、リマップ引数の_って二個か!全角みたいなスペースしてんなとは思ったけど、2個なのね!
上手くできました。
これで5は終わり。
参考
http://wiki.ros.org/ja/ROS/Tutorials/BuildingPackages
http://wiki.ros.org/ja/ROS/Tutorials/UnderstandingNodes