初めてC++で10行以上のコードを書きました。稚拙な点が多々あるかと思いますがお許しください。
1.動機
Raspberry Piに各種I2Cセンサーを取り付けて比較を行いたいと思い、最初はC言語を使って書いていましたが、各種I2Cセンサーの初期化コードや読み出しコードが増えてくるといちいち関数名を変えて対応するのが面倒なのと、A/D変換器の読み出し時間を待つのに逐次実行は効率が悪いと考えて、コーディングの練習がてら、C++を使う事を思い立ちました。
2.プログラムの説明
1秒間に1回、I2Cセンサーから、気温、湿度、大気圧を取得しconsoleに出力します。CTRL-C(SIGINT)で停止します。
3.プログラムの特徴
-
各種I2Cセンサーのコードをクラス化し、簡単に使える様にした。
-
マルチスレッド処理でI/O待ち時間に他の処理を行える様にした。
-
練習で書いたコードですので、まだきっとバグが潜んでいるでしょう。。。
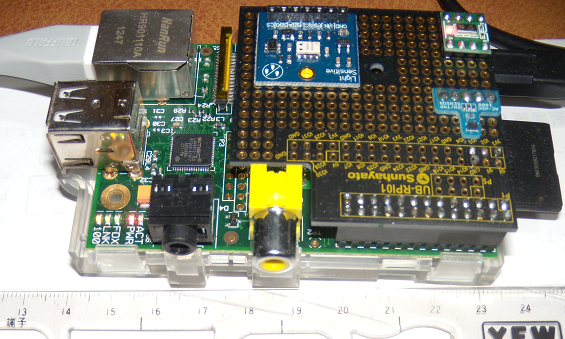
4. 用意したもの
-
ハードウェア
- Raspberry Pi 1 Model B
- HDC1000使用 温湿度センサーモジュール (秋月電子)
- MPL115A2使用大気圧センサーモジュールキット(I2C)(秋月電子)
- MS5607高度計測モジュール(Parallax Inc.)
- Raspberry Pi(ラズベリーパイ)用ユニバーサル基板 UB-RPI01(サンハヤト)
- ハンダ少々、配線材少々、
- その他、SDカード、ケーブル、ケースなど
-
ソフトウェア
- OS Raspbian
- WiringPi
-
参考
>uname -a
Linux rasp1 3.12.28+ #709 PREEMPT Mon Sep 8 15:28:00 BST 2014 armv6l GNU/Linux
>g++ --version
g++ (Debian 4.6.3-14+rpi1) 4.6.3
Copyright (C) 2011 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
5. Makefile
Makefileです。
# Makefile for test.cpp
test: test.cpp
g++ -Wall -O2 -o a.out test.cpp -lwiringPi -pthread -std=c++0x
6. ソースコード
ソースコードです。もし、気になるとこや間違いなどあればコメントいただけると助かります。C言語のキャスト等、まだ自信がないです。
# include <iostream>
# include <thread>
# include <stdio.h>
# include <stdint.h>
# include <wiringPi.h>
# include <wiringPiI2C.h>
# include <time.h>
# include <signal.h>
//using namespace std;
//MS5607-02BA03 Barometric Pressure Sensor
class MS5607
{
public:
void Init();
void Get();
double Read( unsigned char data_type);
private:
static const unsigned char cmd_reset = 0x1e;
static const unsigned char cmd_adc_read = 0x00;
static const unsigned char cmd_adc_conv = 0x40;
static const unsigned char cmd_adc_d1 = 0x00;
static const unsigned char cmd_adc_d2 = 0x10;
static const unsigned char cmd_adc_256 = 0x00;
static const unsigned char cmd_adc_512 = 0x02;
static const unsigned char cmd_adc_1024 = 0x04;
static const unsigned char cmd_adc_2048 = 0x06;
static const unsigned char cmd_adc_4096 = 0x08;
static const unsigned char cmd_prom_rd = 0xa0;
int fd;
unsigned char DevAddr; // 0x77
unsigned int c0,c1,c2,c3,c4,c5,c6,c7;//16bit
unsigned int d1,d2;//24bit
int dt,temp;
int64_t off,sens;
int p;
unsigned int swap16(unsigned int reg);
void debug();
void debug1();
};
unsigned int MS5607::swap16(unsigned int reg)
{
reg=reg&0x0000ffff;
reg=(((reg<<8)|(reg>>8))&0x0000ffff);
return(reg);
}
void MS5607::debug1()
{
//debug data;
c1=46372;
c2=43981;
c3=29059;
c4=27842;
c5=31553;
c6=28165;
d1=6465444;
d2=8077636;
}
void MS5607::debug()
{
printf("c1 c2 c3 c4 c5 c6\n");
printf("%05d %05d %05d %05d %05d %05d\n",
c1,c2,c3,c4,c5,c6);
printf("%04x %016x\n",0,c0);
printf("%04x %016x\n",1,c1);
printf("%04x %016x\n",2,c2);
printf("%04x %016x\n",3,c3);
printf("%04x %016x\n",4,c4);
printf("%04x %016x\n",5,c5);
printf("%04x %016x\n",6,c6);
printf("%04x %016x\n",7,c7);
printf("d1 d2\n");
printf("%08d %08d\n",d1,d2);
printf("dt temp\n");
printf("%08d %08d\n",dt,temp);
printf("off sens p\n");
printf("%10lld %10lld %08d\n",off,sens,p);
}
void MS5607::Init()
{
DevAddr=0x77;
fd= wiringPiI2CSetup(DevAddr);
if(fd<0)
{
std::cerr <<"センサー設定エラー"<<std::endl;
}
wiringPiI2CWrite(fd, cmd_reset); //Reset
usleep(1000000);
unsigned int reg;
reg=wiringPiI2CReadReg16(fd,cmd_prom_rd+0);
c0=swap16(reg);
reg=wiringPiI2CReadReg16(fd,cmd_prom_rd+2);
c1=swap16(reg);
reg=wiringPiI2CReadReg16(fd,cmd_prom_rd+4);
c2=swap16(reg);
reg=wiringPiI2CReadReg16(fd,cmd_prom_rd+6);
c3=swap16(reg);
reg=wiringPiI2CReadReg16(fd,cmd_prom_rd+8);
c4=swap16(reg);
reg=wiringPiI2CReadReg16(fd,cmd_prom_rd+10);
c5=swap16(reg);
reg=wiringPiI2CReadReg16(fd,cmd_prom_rd+12);
c6=swap16(reg);
reg=wiringPiI2CReadReg16(fd,cmd_prom_rd+14);
c7=swap16(reg);
}
void MS5607::Get()
{
unsigned int reg;
unsigned char buff[4];
wiringPiI2CWrite(fd, cmd_adc_conv|cmd_adc_d1|cmd_adc_4096); //Convert
usleep(100000);
wiringPiI2CWrite(fd, cmd_adc_read); //
read(fd,buff,3);
reg=0;
reg=reg |(buff[0]<<16);
reg=reg |(buff[1]<<8);
reg=reg |(buff[2]<<0);
d1=reg;
wiringPiI2CWrite(fd, cmd_adc_conv|cmd_adc_d2|cmd_adc_4096); //Convert
usleep(100000);
wiringPiI2CWrite(fd, cmd_adc_read); //
read(fd,buff,3);
reg=0;
reg=reg |(buff[0]<<16);
reg=reg |(buff[1]<<8);
reg=reg |(buff[2]<<0);
d2=reg;
// debug1();
dt=(int)(d2-(c5<<8));
temp=2000+((dt*c6)>>23);
int64_t x1,x2,x3;
x1=(int64_t)c2<<17;
x2=(c4*dt);
x3=x2>>6;
off=x1+x3;
// printf("x1=%lld x2=%lld x3=%lld off=%lld\n",x1,x2,x3,off);
//off=(c2<<17)+((c4*dt)>>6);
sens=(c1<<16)+((c3*dt)>>7);
x1=d1*sens>>21;
p=(int)((static_cast<int64_t>(x1)-static_cast<int64_t>(off))>>15);
// debug();
}
double MS5607::Read(unsigned char data_type)
{
if(data_type==0) return ((double)temp/100);
if(data_type==1) return ((double)p/100);
return((double)p/100);
}
//MPL115A2 Digital Barometer
class MPL115A2{
public:
void Init();
void Get();
double Read( unsigned char data_type);
void conv_test_exec();
private:
double conv_double( unsigned int reg, unsigned int n);
void conv_test(unsigned int test,unsigned int n);
int fd;
unsigned char DevAddr; // 0x60
double padc;
double tadc;
double a0,b1,b2,c12,p_comp,p_hpa,temp;
};
double MPL115A2::conv_double( unsigned int reg, unsigned int n)
{
union
{
double d;
uint64_t i;
struct
{
uint64_t frac :52;
unsigned int exp :11;
unsigned int sign :1;
} b;
}u;
unsigned int s,m;
u.i=0;
reg=(((reg<<8)|(reg>>8))&0x0000ffff);
if(reg==0)
{
u.d=0;
}
else
{
if(((reg>>15)&0x01)==0)
{
u.b.sign=0;
}
else
{
u.b.sign=1;
reg=((reg^(-1))+1)&0x0000ffff;//2の補数を戻す。
}
m=0x8000;
for(s=0;s<15;s++)//最上位の1が何ビットめか調べる。
{
if(((m>>s)®) != 0) break;
}
u.b.frac = (uint64_t)((reg<<s)&0x7fff)<<(52-15);
u.b.exp = 0x03ff+n-s;
}
return(u.d);
}
void MPL115A2::conv_test(unsigned int reg,unsigned int n)
{
printf("--------------\n");
printf("reg=%08x n=%d\n",reg,n);
reg=(((reg<<8)|(reg>>8))&0x0000ffff);
printf("reg=%08x n=%d\n",reg,n);
double d;
d=conv_double(reg,n);
printf("dob=%g \n",d);
printf("dob=%15.10f \n",d);
printf("dob=%15.10e \n",d);
}
void MPL115A2::conv_test_exec()
{
conv_test(0x0000,12);
conv_test(0x8000,12);
conv_test(0xffff,12);
conv_test(0x3ece,12);
conv_test(0xb3f9,2);
conv_test(0xc517,1);
conv_test(0x33c8,-9);
conv_test(0x6680>>1,10);//unsigned なので>>1
conv_test(0x7ec0>>1,10);
}
void MPL115A2::Init()
{
DevAddr=0x60;
fd= wiringPiI2CSetup(DevAddr);
if(fd<0)
{
std::cerr <<"センサー設定エラー"<<std::endl;
}
unsigned int reg;
reg=wiringPiI2CReadReg16(fd,0x04);//a0
a0=conv_double(reg,12);
reg=wiringPiI2CReadReg16(fd,0x06);//b1
b1=conv_double(reg,2);
reg=wiringPiI2CReadReg16(fd,0x08);//b2
b2=conv_double(reg,1);
reg=wiringPiI2CReadReg16(fd,0x0a);//c12
c12=conv_double(reg,-9);
}
void MPL115A2::Get()
{
/*
// printf("MPL115A2:StartConv1\n");
wiringPiI2CWrite(fd, 0x12); //Start Conversions
wiringPiI2CWrite(fd, 0x00); //
usleep(100000);
// printf("MPL115A2:StartConv2\n");
wiringPiI2CWrite(fd, 0x12);
wiringPiI2CWrite(fd, 0x01);
usleep(100000);
*/
wiringPiI2CWriteReg8(fd,0x12,0);//Start Conversions
usleep(100000);
unsigned int reg;
reg=wiringPiI2CReadReg16(fd,0x00);
// printf("MPL115A2:padc %x\n",reg);
padc=conv_double(reg>>1,10);//unsigned なので >>1
reg=wiringPiI2CReadReg16(fd,0x02);
// printf("MPL115A2:tadc %x\n",reg);
tadc=conv_double(reg>>1,10);
// printf("MPL115A2:padc %.4f tadc %.4f\n",padc,tadc);
p_comp = a0 + (b1 + c12 * tadc) * padc + b2 * tadc;
p_hpa = ((65.0/1023.0) * p_comp + 50) * 10;
temp=(tadc-498.0)/(-5.35)+25.0;
// printf("MPL115A2:temp %.4f p_hpa %.4f\n",temp,p_hpa);
}
double MPL115A2::Read(unsigned char data_type)
{
if(data_type==0) return (temp);
if(data_type==1) return (p_hpa);
return(p_hpa);
}
//HDC1000 Humidity and Temperature Digital Sensor Class
class HDC1000{
public:
void Init(); //
void Get();
double Read( unsigned char data_type);
private:
int fd;
// デバイスアドレス
// i2cdetect -y 1 で調べられる
unsigned char DevAddr;
// 温度取得ポインタとConfigポインタのアドレス指定。
// 基本的にこのままでOK。今回は温度と湿度を同時取得するので
// 温度側だけでOK
unsigned char tempp;
unsigned char confp;
// デバイスの設定
// 2バイトの設定データを1バイトに分けて設定。
// 1=上位ビット側 2=下位ビット側
// 0x1234という設定データなら 1=0x12 2=0x34と設定
unsigned char devconf1;
unsigned char devconf2;
//
double temp;
double humi;
};
void HDC1000::Init()
{
// デバイスアドレス
// i2cdetect -y 1 で調べられる
DevAddr=0x40;
// 温度取得ポインタとConfigポインタのアドレス指定。
// 基本的にこのままでOK。今回は温度と湿度を同時取得するので
// 温度側だけでOK
tempp=0x00;
confp=0x02;
// デバイスの設定
// 2バイトの設定データを1バイトに分けて設定。
// 1=上位ビット側 2=下位ビット側
// 0x1234という設定データなら 1=0x12 2=0x34と設定
devconf1=0x10;
devconf2=0x00;
unsigned char ConfData[3];
ConfData[0]= confp;
ConfData[1]= devconf1;
ConfData[2]= devconf2;
fd=wiringPiI2CSetup(DevAddr);
/*
wiringPiSetupGpio();
pinMode(RDPin,INPUT);
*/
if(write(fd,ConfData,sizeof(ConfData))<0)
{
std::cerr <<"センサー設定エラー"<<std::endl;
}
// return fd;
}
void HDC1000::Get()
{
unsigned char GetData[1];
unsigned char ReData[4];
GetData[0]=tempp;
// センサーに温度測定要求
if(write(fd,GetData,1)<0)
{
printf("データ要求エラー\n");
}
// センサーが測定→変換を完了させるのを待つ
// while((digitalRead(RDPin))==1);
usleep(500000);
// データ取得
if(read(fd,ReData,4)<0)
{
printf("データ受信エラー\n");
}
int conv;
conv=(ReData[0]<<8)|(ReData[1]);
// 戻ってきたデータをくっつけて返す
temp= ( (double)(conv)/65536.000) * 165.000 - 40.000;
conv=(ReData[2]<<8)|(ReData[3]);
humi= ( (double)(conv)/65536.000) * 100.000;
}
double HDC1000::Read(unsigned char data_type)
{
if(data_type==0) return (temp);
if(data_type==1) return (humi);
return(temp);
}
void governor() {
sleep(1);
}
static int sig =0;
void sig_handler(int signo)
{
sig=1;
}
int main()
{
HDC1000 hdc1000_1;
MPL115A2 mpl115a2_1;
MS5607 ms5607_1;
struct tm* date;
time_t timer;
hdc1000_1.Init();
mpl115a2_1.Init();
ms5607_1.Init();
std::cout << "Hello\nWorld!\n";
if( signal(SIGINT, sig_handler) == SIG_ERR) {
printf("sig_handler fail\n");
}
while(1) {
std::thread th0(governor);
//
std::thread th1([&]{hdc1000_1.Get();});
std::thread th2([&]{mpl115a2_1.Get();});
std::thread th3([&]{ms5607_1.Get();});
//現在時刻の取得
time(&timer);
date=localtime(&timer);
//
th1.join();
th2.join();
th3.join();
// 表示
printf("%.24s 気温:%.2f℃ 湿度:%.2f% 気圧: %.2fhp %.2fdeg %.2fmbar %.2fdeg\n",
asctime(date),
hdc1000_1.Read(0),//Temp
hdc1000_1.Read(1),//Humi
mpl115a2_1.Read(1),
mpl115a2_1.Read(0),
ms5607_1.Read(1),//
ms5607_1.Read(0) //Temp
);
// Wait
th0.join();
// Terminate
if(sig) {
printf("Recieve SIGINT\n");
break;
}
}
}
7.実行時の画面
1秒間に1回、I2Cセンサーから気温、湿度、大気圧を取得します。CTRL-Cで停止します。
Thu May 12 20:12:58 2016 気温:35.41℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.84mbar 22.97deg
Thu May 12 20:12:59 2016 気温:35.44℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.87mbar 22.97deg
Thu May 12 20:13:00 2016 気温:35.45℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.87mbar 22.98deg
Thu May 12 20:13:01 2016 気温:35.45℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.84mbar 23.00deg
Thu May 12 20:13:02 2016 気温:35.45℃ 湿度:32.34% 気圧: (1) 1017.66hp 31.17deg (2) 998.86mbar 23.01deg
Thu May 12 20:13:03 2016 気温:35.41℃ 湿度:32.34% 気圧: (1) 1018.08hp 31.36deg (2) 998.87mbar 23.02deg
Thu May 12 20:13:04 2016 気温:35.45℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.89mbar 23.02deg
Thu May 12 20:13:05 2016 気温:35.45℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.92mbar 23.01deg
Thu May 12 20:13:06 2016 気温:35.45℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.91mbar 23.02deg
Thu May 12 20:13:07 2016 気温:35.44℃ 湿度:32.34% 気圧: (1) 1017.66hp 31.17deg (2) 998.89mbar 23.02deg
Thu May 12 20:13:08 2016 気温:35.41℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.89mbar 23.02deg
Thu May 12 20:13:09 2016 気温:35.41℃ 湿度:32.34% 気圧: (1) 1017.66hp 31.17deg (2) 998.89mbar 23.01deg
Thu May 12 20:13:10 2016 気温:35.41℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.92mbar 23.01deg
Thu May 12 20:13:11 2016 気温:35.47℃ 湿度:32.34% 気圧: (1) 1024.08hp 31.17deg (2) 998.92mbar 23.01deg
Thu May 12 20:13:12 2016 気温:35.45℃ 湿度:32.34% 気圧: (1) 1024.50hp 31.36deg (2) 998.85mbar 23.01deg
Thu May 12 20:13:13 2016 気温:35.49℃ 湿度:32.34% 気圧: (1) 1024.50hp 31.36deg (2) 998.91mbar 23.03deg
Thu May 12 20:13:14 2016 気温:35.50℃ 湿度:32.34% 気圧: (1) 1017.66hp 31.17deg (2) 998.90mbar 23.04deg
^CRecieve SIGINT
8.謝辞
satorukunさんの「Raspberry Pi 2 Model B でI2C 温度+湿度センサーモジュール(HDC1000)を使う」を参考にさせていただきました。