カメラの位置調整
パイロン旋回中にもパイロンが視野に入るようカメラの位置を上げました。
横方向は車輪の外側+車幅まで見えますので、旋回中に迷子になりません。

首の長くなったJetbot。オリジナルに対し倍の高さ、少し下向き。

カメラビュー
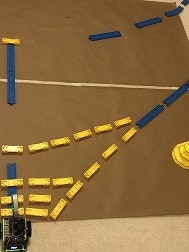
視野、ブロックで1/4, 1/2, 3/4, 1の画面位置を示しています。
教師データ用コースは楽勝!
1)パイロンを回る。
2)プラレースに沿って走る。
これを学習するコースを作り、データ取り、学習した自動運転です。
https://www.youtube.com/watch?v=sCBsngtiI44

じゃあ、コースを変えても走る?
コースを大幅に変更しても再学習なしで走りますので、
パイロンを回る事、プラレールに沿って走ることを覚えたようです。
AIはコースが変わったことを判っているのでしょうか?
https://www.youtube.com/watch?v=bLH2F7jwnx8

パイロンコースで意地悪テスト
自動運転中にパイロンを追加、撤去するとどうなる?
https://www.youtube.com/watch?v=Ci-GV2D7ljY&feature=youtu.be

donkeycarで一度の学習でいろいろなコースに対応するアイデアでした。