■はじめに
電池BOXの裏にサーボを両面テープで貼りつけただけという、小学生でも余裕で行ける4足歩行ロボットを作ったので紹介します。ソフトウェアも簡単で、ブロックプログラムで作りました。サーボは4台使うので、拡張ボードで繋ぎました。なかなか楽しい動きをするので、ぜひ楽しんで下さい。
ちなみに、obniz版の4足歩行ロボットの記事もあります。
https://qiita.com/Google_Homer/items/c332c8c4f778bb31b3a1
■まずはデモ動画から
#microbit #4足歩行ロボット
— Google Homer (@google_homer_) 2019年3月11日
電池BOXの裏にサーボを貼り付けただけの4足歩行ロボットのmicro:bit版もできた。 pic.twitter.com/pmgZIfsgAZ
■ロボット組み立てに必要なもの
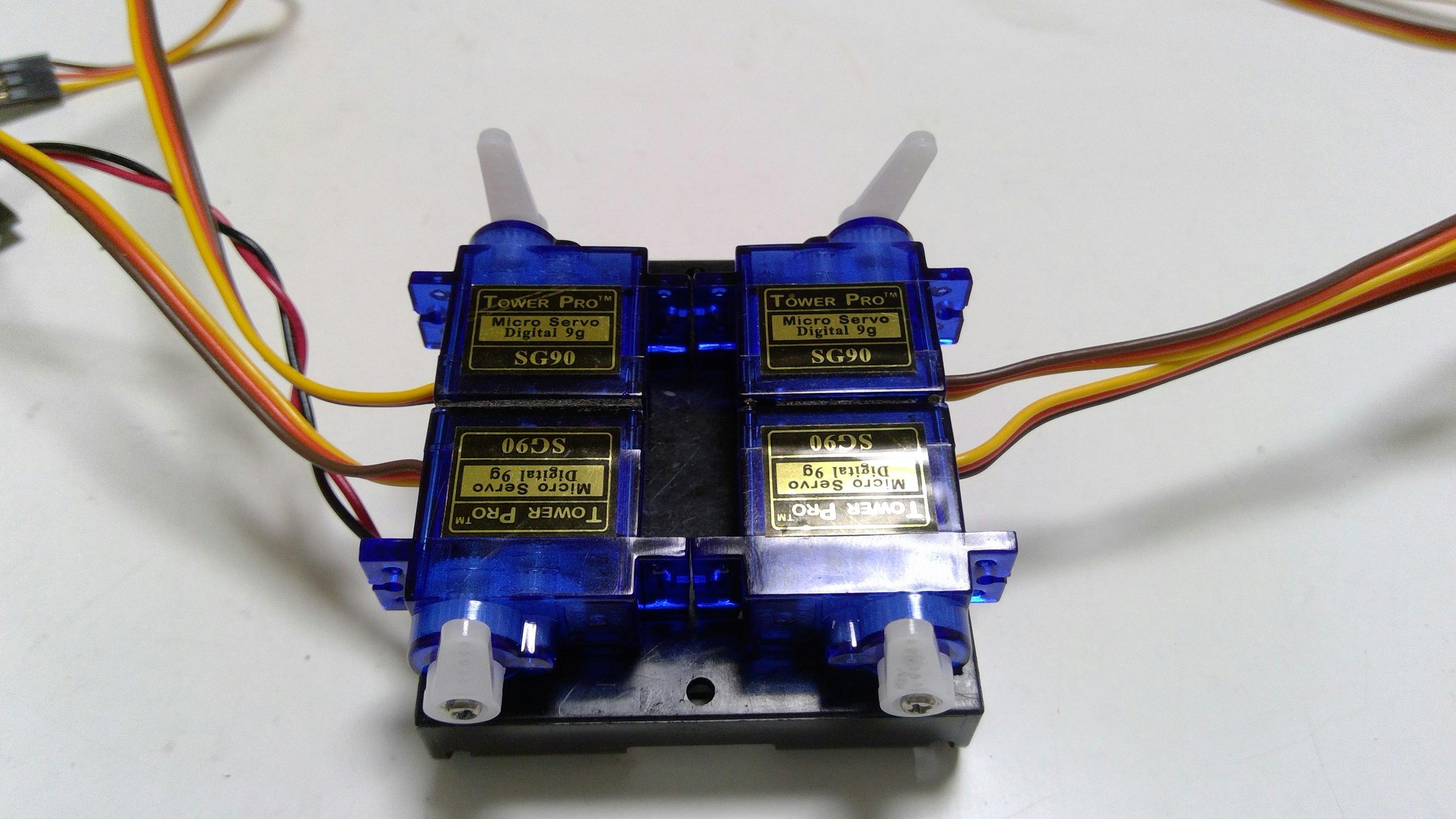
① サーボモーター Tower Pro SG90 or SG92R × 4
② 強力タイプの両面テープ少々
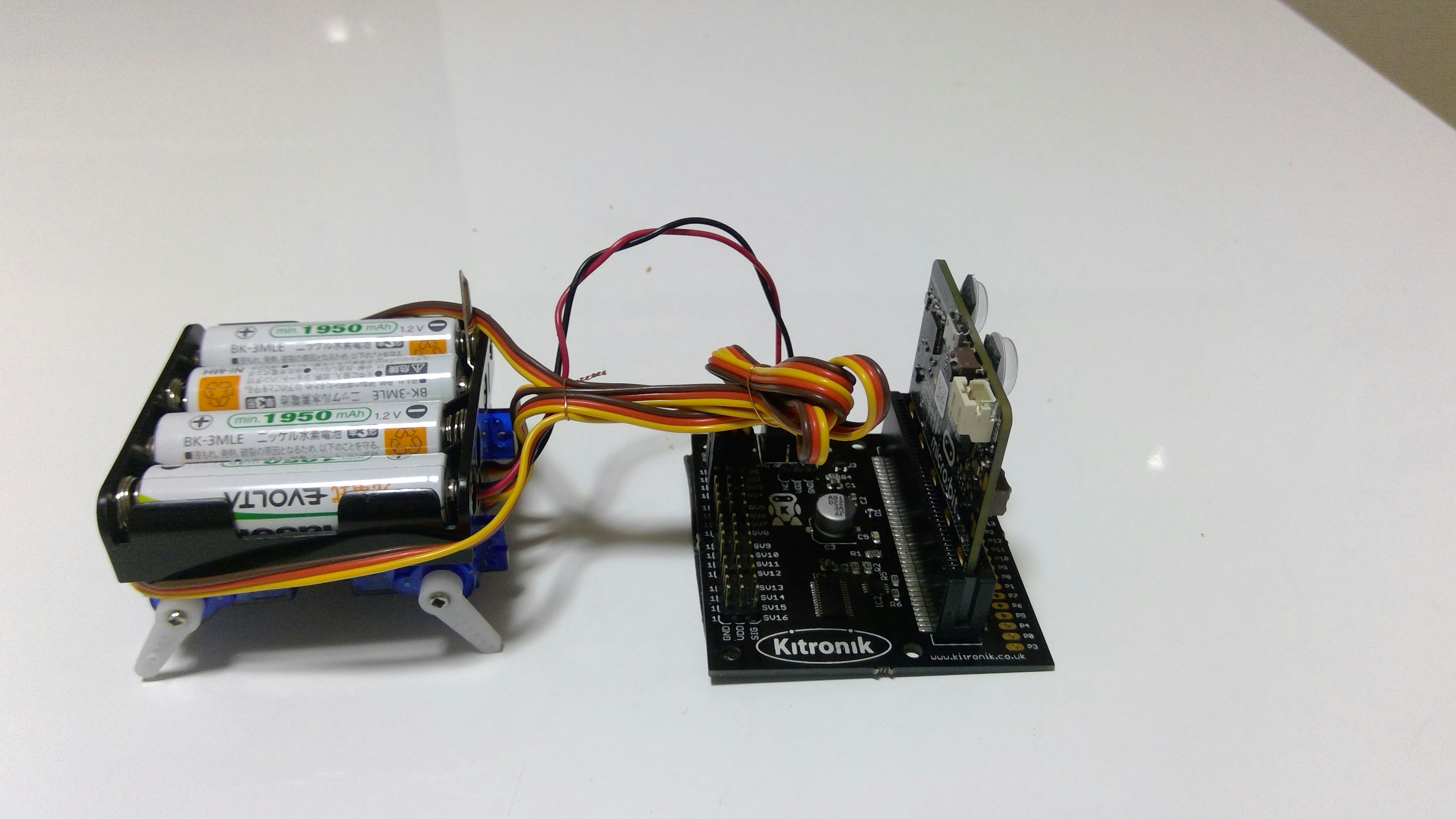
③ 単三×4本の電池BOX (下記拡張基板に接続し、micro:bitにも給電されます。)
④ サーボ拡張基板 kitronik-I2C-16-servo
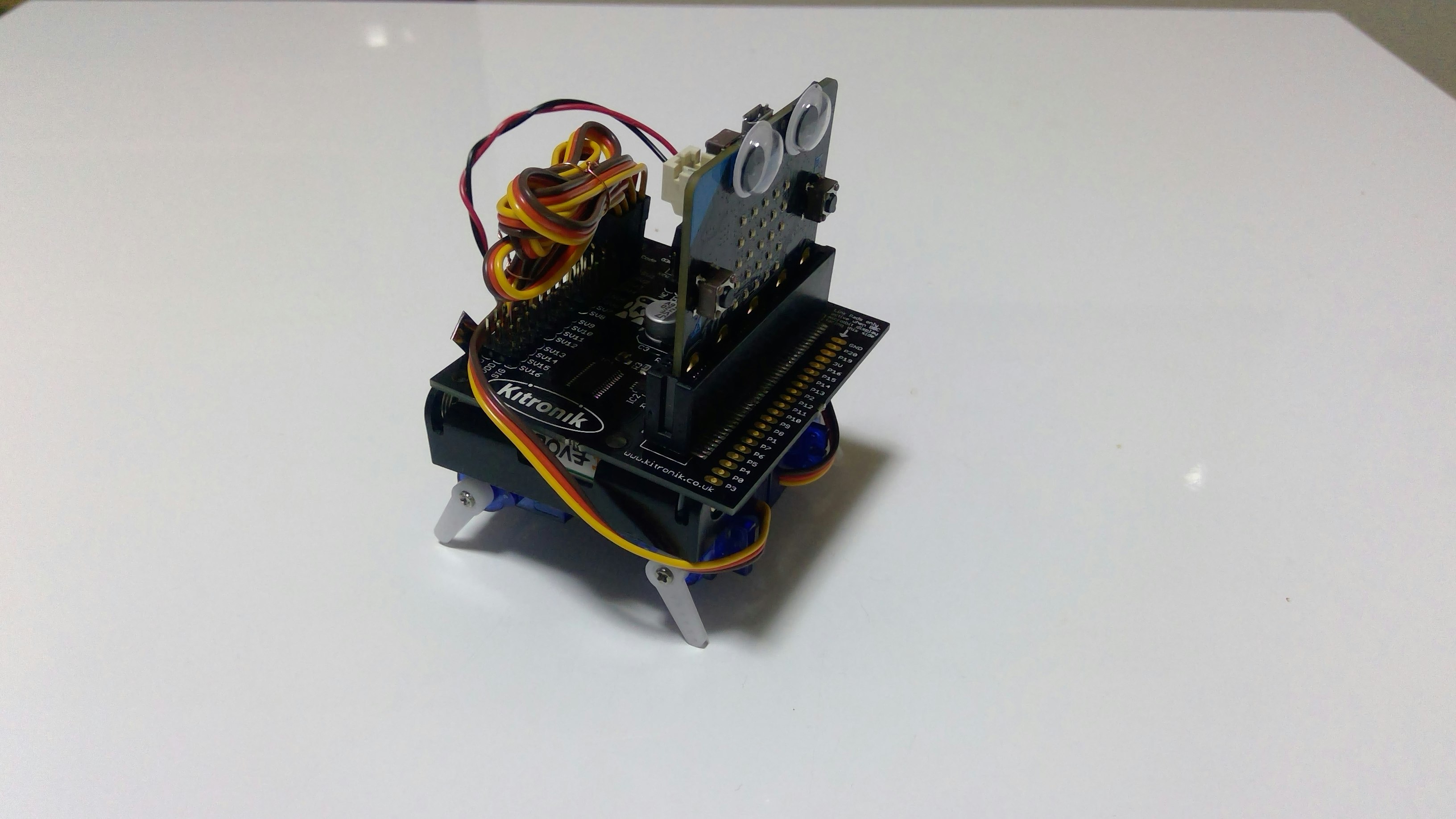
■ロボットの組み立て方
・サーボを両面テープで電池BOXの裏に貼り付ます。
・足はサーボ付属のホーンを使います。
・回転角度90度で直立するよう取り付ます。
・サーボの向きは必ず写真と同じにして下さい。
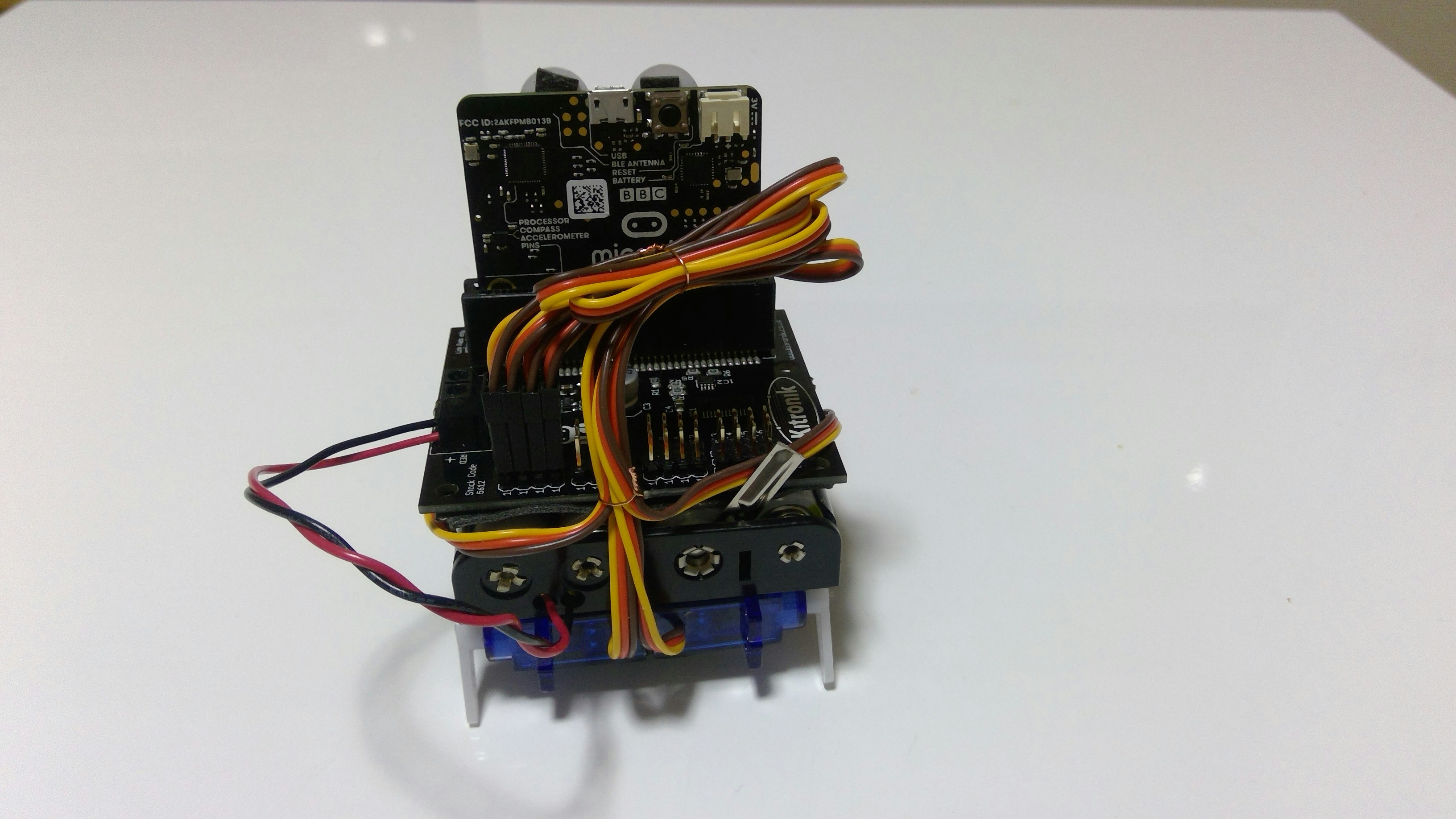
・電池BOXの上に適当にmicro:bitを盛ります。
・拡張基板のServo1から順に、後左足→後右足→前左足→前右足のサーボ端子を刺します。
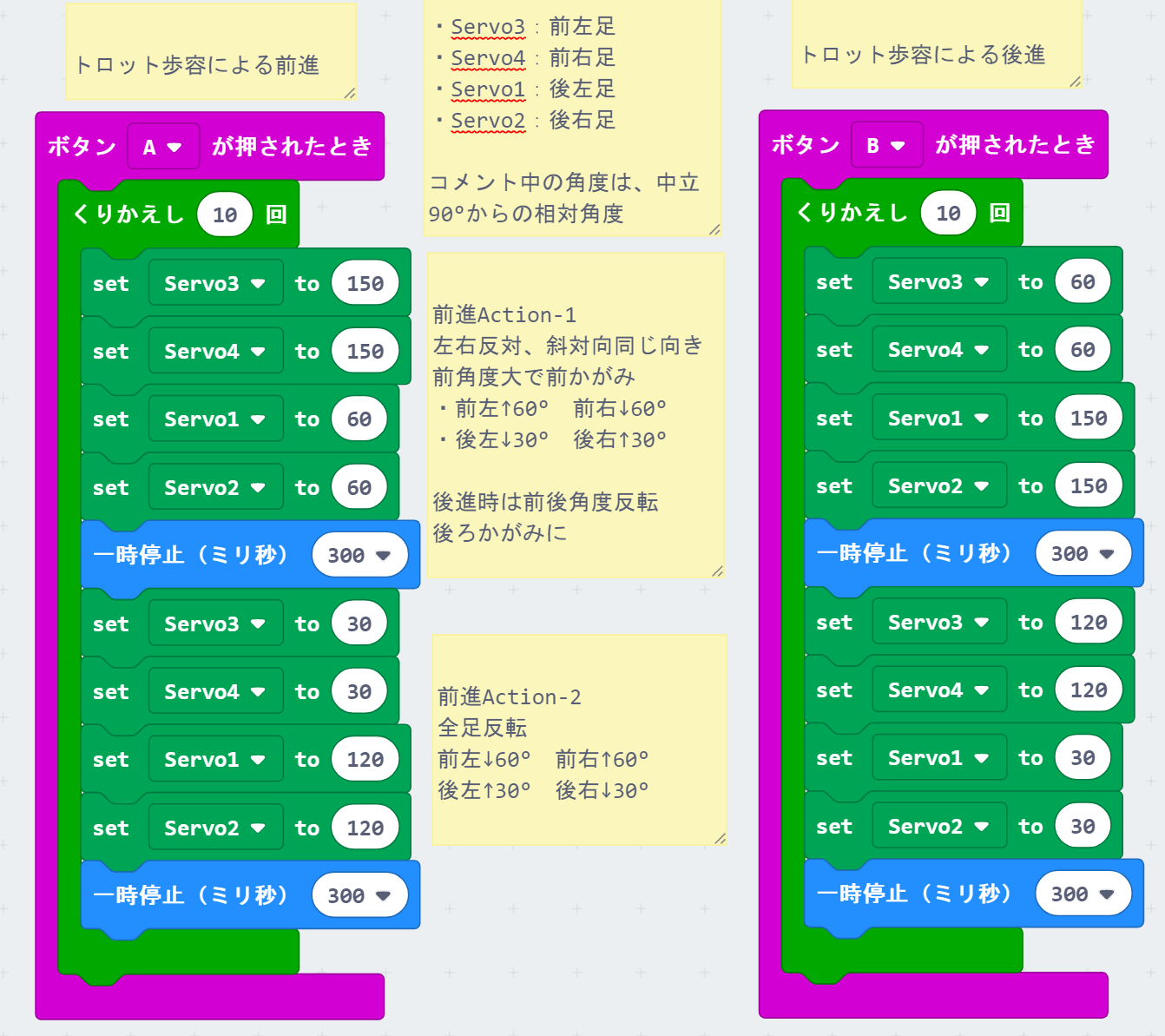
■ブロックプログラム
Aボタンで前進、Bボタンで後進します。いずれも10歩、歩きます。
歩行ロジックは「トロット歩容」モデルを模しています。
プログラム中の角度は絶対値ですがサーボの組付け方向によって反転していたりしてどんな動きをさせているのか分かり難いので、コメントは直立90°からの相対角度で表記して意味がわかりやすくしています。
サーボドライバーは拡張機能の「kitronik-I2C-16-servo」を使いました。
以上です。