※2018年6月、ML-Agents v0.4に対応するように修正いたしました。
Unity ML-Agents
Unity ML-Agents というUnityを使って強化学習できるライブラリがあります。
公式のほうにチュートリアルも載っているのですぐ試してみることができます。
チュートリアルをやってみると、ボールを落とさないように板を動かす学習モデルができると思います。

今回は自分でゲームを作ってUnity ML-Agentsで強化学習していきたいと思います。
作るゲームは強化学習では王道ともいえる倒立振子です。
棒を倒さないようにするやつですね。
ゲームを作る
公式の方から、ML-Agents をダウンロードしてきます。
unity-environmentをUnityで開きます。

CubeとCylinderを作ります。名前はCartとPoleに替えます。
適当に色を付け、Transformは次のように設定します。



それぞれにRigidbodyをとりつけ、CartはIs Kinematicにチェックを入れ、PoleはDragを0.5にします。
Poleを選択し、Component>Physics>Hinge Jointを付けます。

Connected BodyにCartを入れ、他の設定は画像にようにします。
ML-Agents
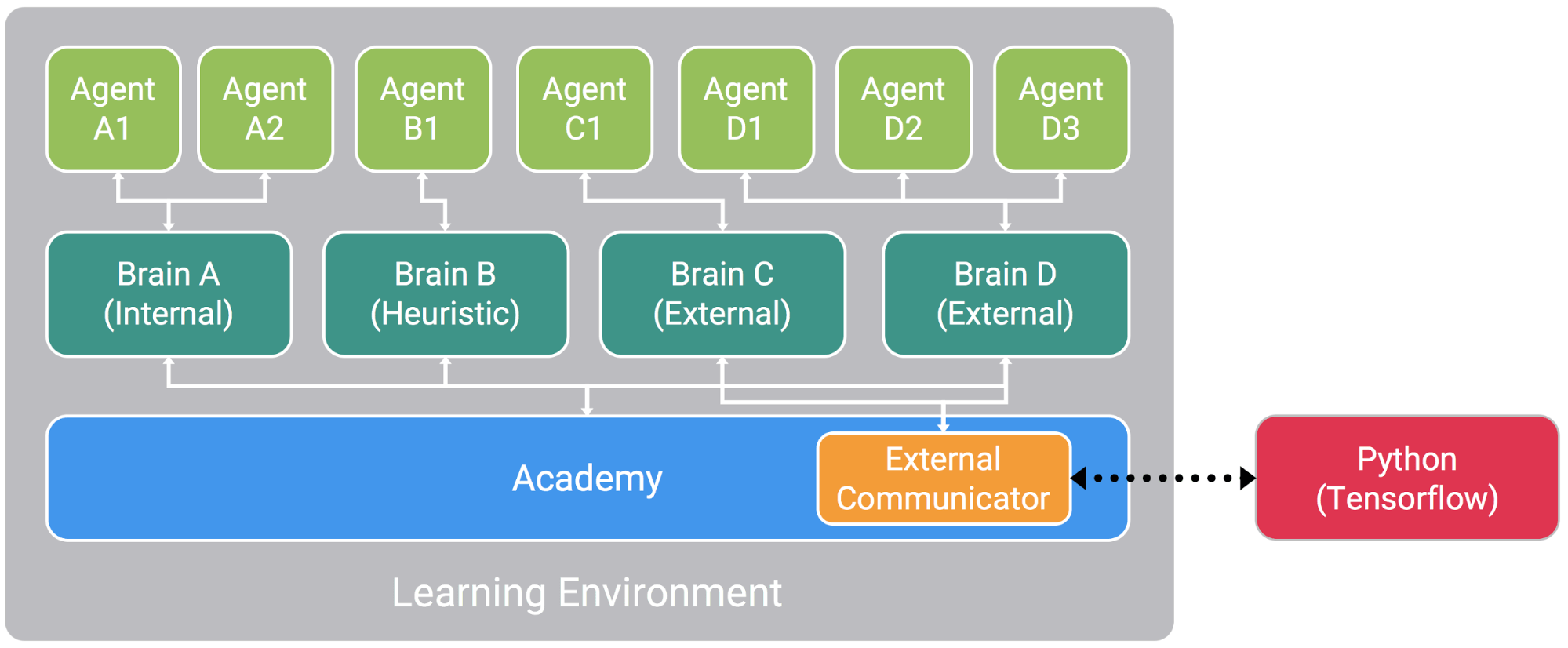
ML-Agentsでは画像のようにAgent,Brain,Academyで制御し、外部のPythonを利用して学習を行っていくようです。
Unity Hierarchyで空のゲームオブジェクトを3つ作り、Game,CartPoleBrain,CartPoleAcademyと名付けます。
そして、画像のように配置します。

ML-Agents>Template>ScriptsにTemplateAcademy,TemplateAgentsが入っているので、それらをCartPoleAcademy,CartPoleAgentsに変更、内部のクラス名も同じように変えて、HierarchyのCartPoleAcademy(オブジェクト)とCart(オブジェクト)にそれぞれ取り付けます。


ML-Agents>ScriptsにBrainがあるのでこれをCartPoleBrain(オブジェクト)に取り付けます。
Cart Pole Agents
CartPoleAgentsのスクリプトを以下のように書き換えます。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using MLAgents;
public class CartPoleAgent : Agent
{
public GameObject pole;
Rigidbody poleRB;
float angle_z;
float cart_x;
float anguVelo_z;
public override void InitializeAgent()
{
base.InitializeAgent();
poleRB = pole.GetComponent<Rigidbody>();
}
void FixedUpdate()
{
}
public void StateTransition()
{
//ポールの角度が-30~30度の時、報酬+0.01、それ以上傾いたら報酬-1
if (-30f < angle_z && angle_z < 30f)
{
AddReward(0.01f);
}
if ((-180f < angle_z && angle_z < -30f) || (30f < angle_z && angle_z < 180f))
{
AddReward(-1f);
Done();
}
//カートの位置が-3~3の範囲を越えたら報酬-1
if (cart_x < -3f || 3f < cart_x)
{
AddReward(-1f);
Done();
}
}
public override void CollectObservations()
{
AddVectorObs(cart_x);
AddVectorObs(angle_z);
AddVectorObs(anguVelo_z);
}
public void MoveAgent(float[] act)
{
//0-Left, 1-Right
int action = Mathf.FloorToInt(act[0]);
if (action == 0)
{
transform.Translate(-0.05f, 0, 0);
}
if (action == 1)
{
transform.Translate(0.05f, 0, 0);
}
}
public override void AgentAction(float[] vectorAction, string textAction)
{
//行動
MoveAgent(vectorAction);
//カートの位置、ポールの角度と角速度
cart_x = transform.localPosition.x;
angle_z = pole.transform.localRotation.eulerAngles.z;
//angle_zを-180~180度に変換
if (180f < angle_z && angle_z < 360f)
{
angle_z = angle_z - 360f;
}
anguVelo_z = poleRB.angularVelocity.z;
//状態の遷移
StateTransition();
}
public override void AgentReset()
{
//エージェントの状態をリセット
transform.localPosition = new Vector3(0f, 0f, 0f);
pole.transform.localPosition = new Vector3(0f, 1f, 0f);
pole.transform.localRotation = Quaternion.Euler(0f, 0f, 0f);
poleRB.velocity = new Vector3(0f, 0f, 0f);
//ポールにランダムな傾きを与える
poleRB.angularVelocity = new Vector3(0f, 0f, Random.Range(-0.5f, 0.5f));
}
public override void AgentOnDone()
{
}
}
Brain, Agentを次のように設定します。


きちんと動いて、角度が一定以上になったらリセットされればOKです。
そしたらGame(オブジェクト)を複製して16個にしましょう。

これで学習準備が整いました。
ビルドして学習
1.CartPoleBrainのBrainTypeをExternalにする
2.画面上部のバーから Edit > Project Settings > Player
Resolution and Presentation > Run in Background がチェックされていることを確認
Resolution and Presentation > Display Resolution Dialog がDisabledににセットされていることを確認
3.File > Build Settingsから内容を確認してビルド。保存先は公式からダウンロードしたml-agents-master > pythonです。名前はCartPoleにしておきましょう。
pythonフォルダでAnacondaプロンプトを開き、次のように入力します。
python learn.py CartPole --train
trainer.configというファイルを開くとハイパーパラメータなどの設定ができます。

基本的にデフォルトのままで、max_stepsだけ20万回にしました。
学習が完了すると、python/models/ppo/ フォルダにCartPole.bytesというファイルが生成されています。
これをUnityのAssetsに持っていきます。
Edit > Project Settings > Player の Other Settings欄へ行き、
Scripting Runtime Version を Experimental(.NET4.6Equivalent)にする
Scripting Define Symbols に ENABLE_TENSORFLOW と入力する

また、Using TensorFlowSharp in Unity (Experimental)
こちらからTensorflowSharpのUnityPackageをダウンロードして、環境にインポートしましょう。
これは、Unity環境でTensorflowを使うためのプラグインです。

CartPoleBrain(オブジェクト)のBrain Type をInternalにする
先ほどのCartPole.bytesファイルをGraph Modelにセット。

これで実行してみましょう。
結果
20万回学習した結果、倒れることはなくなりました。