はじめに
Ardupilotで自動運転を行う場合
ARMしてモータを動かせるようにする ⇒ AUTOモードに切り替えて自動運転に移行
といった手順で動かすと思うのですが、機体のそばに人が居る場合は注意しないと怖いかなと思います。
(わかっていると思うので問題はないと思いますが。。。)
ですからAUTOに切り替えてから間をおいて動くように出来たら良いのでは?と思いました。
(切り替えた後に周囲への注意喚起して安全を確保するイメージです)
調べていくと、物理SW(送信機のSWなど)とは別にミッションプラン作成時にモーターのARM/DISARMさせる方法について動画がありましたので、解説されていた方法を基に試した方法について記載したいと思います。
環境
| 項目 | 詳細 |
|---|---|
| Auto Pilot | Cube Orange |
| PC(OS) | windows11 |
| GCS | Misson Planner(1.3.77) |
| Firmware | Ardupilot Rover 4.2.2 |
設定方法
ミッションプラン作成時に『Waypoint』や『Delay』と併せて『UNKNOWN』コマンドを使用します。
以下に『UNKNOWN』コマンドの設定方法について記載します。
【手順】
1.フライトプラン画面からコマンド UNKNOWN を選択します
2.Mavlink ID 入力と表示された画面が表示されますので 218 と入力します
3.一番左側のセルにファンクション番号 153 を入力します
4.左から二番目のセルSWの状態を表す番号(0/2)を入力します
解説
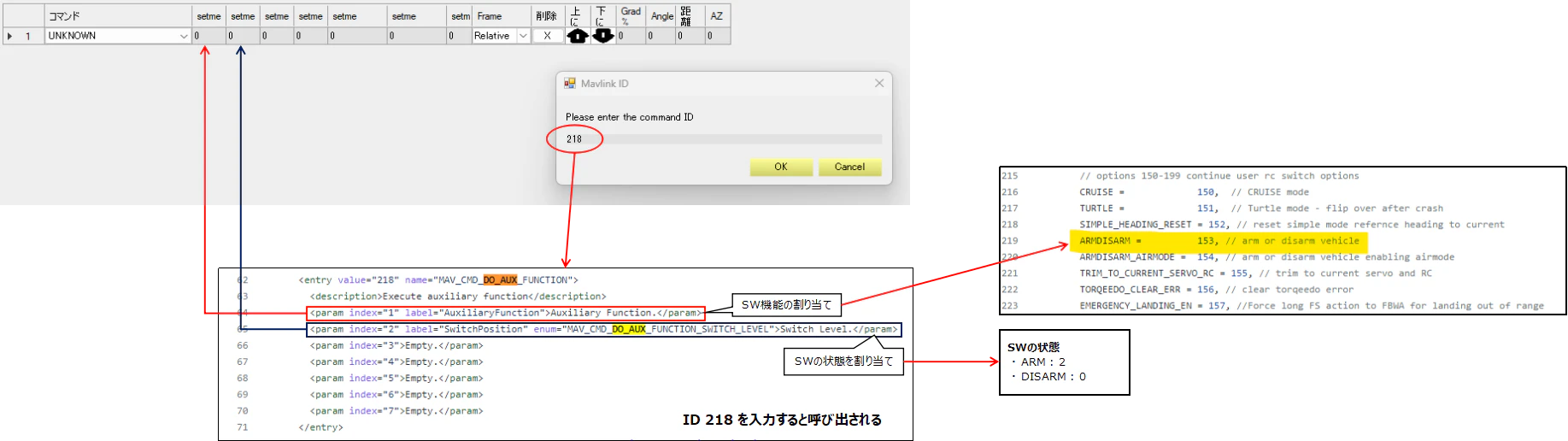
UNKNOWNコマンドを使うと MAVLINK ID で設定された動作を行えるようになっています。
補助機能として送信機に割り当てられたSWの機能を実行する MAVLINK ID 218 を入力することで、これらのコマンドが読み込まれて実行されます。
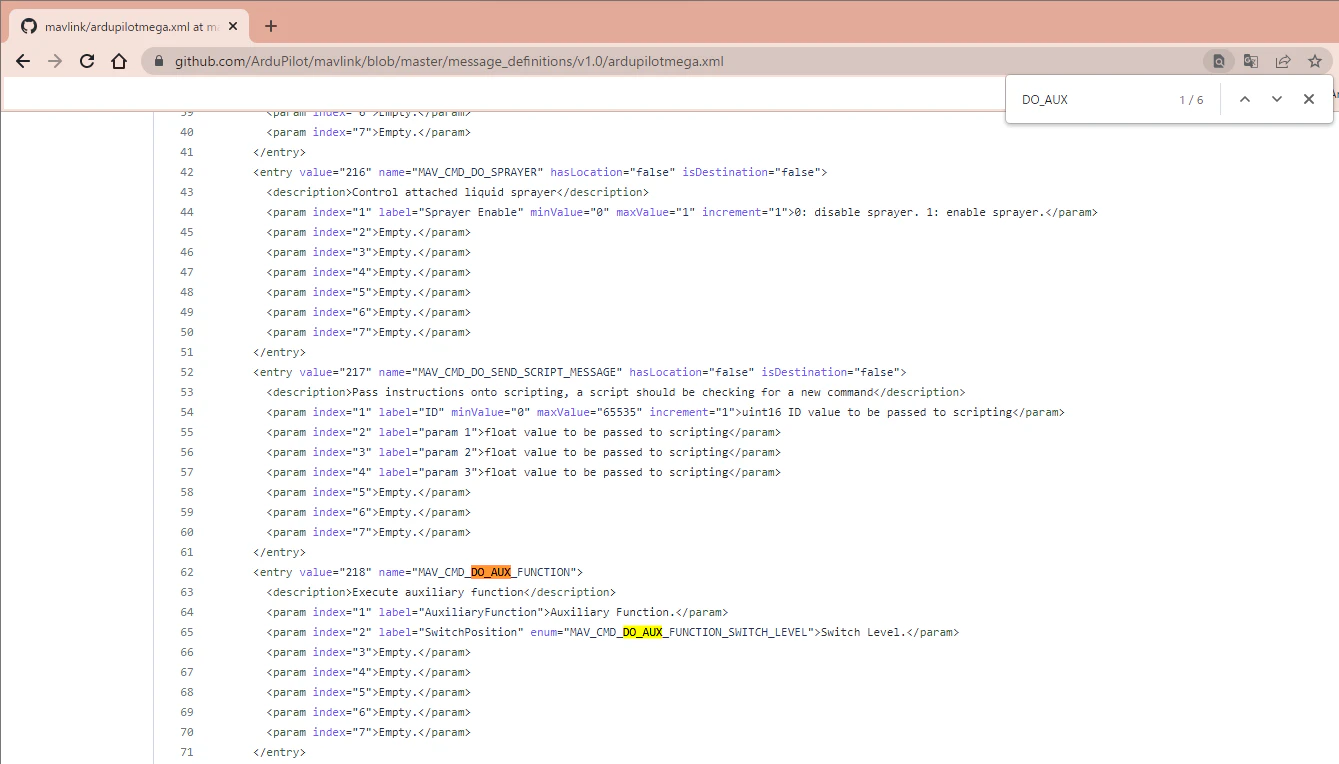
MAVLINK IDの確認
補助機能として送信機に割り当てられたSWの機能を実行するIDはこちらに記載されています。
DO_AUX で検索すると ID 218 がこの機能を実行するIDであることが解ります。
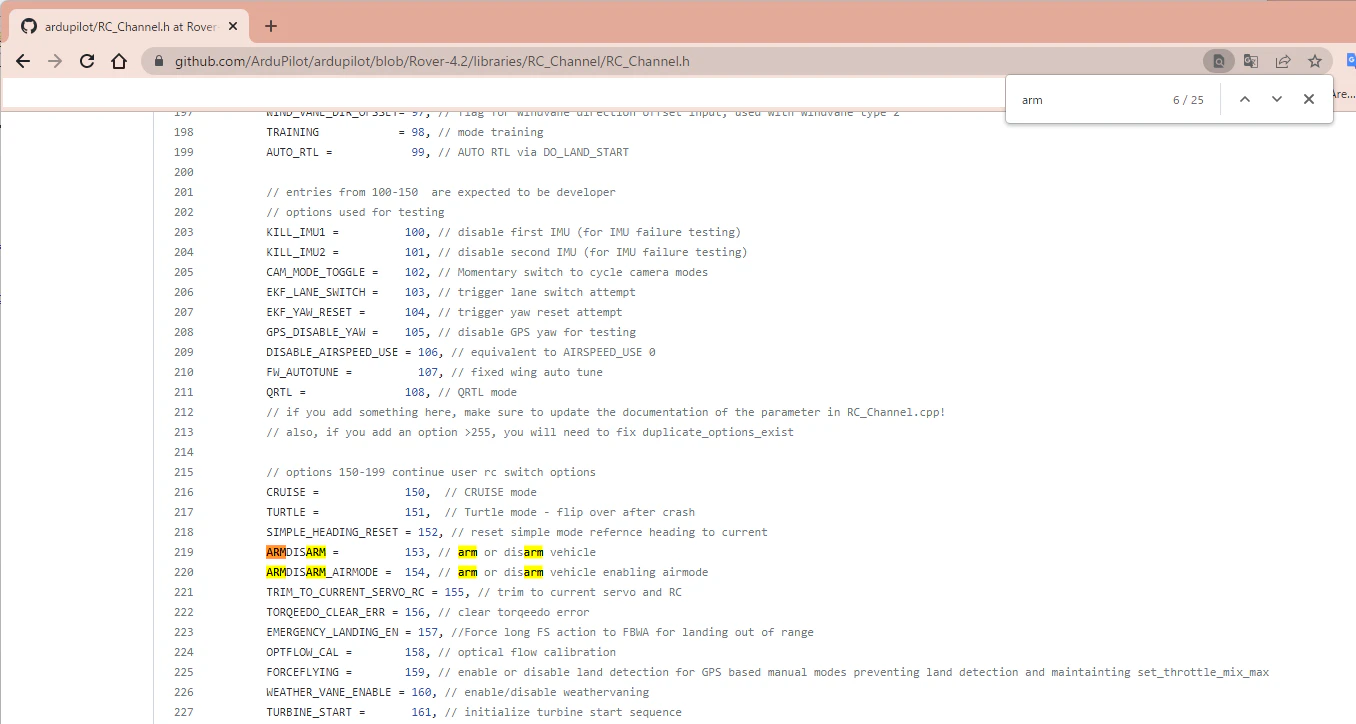
ファンクション番号の確認
ファンクション番号はこちら に記載されています
ARM で検索すると Rover4.2では 153 が ARM/DISARM に該当するファンクション番号であることが解ります。
ミッションプラン作成例
AUTO MODE 移行後 10 秒毎に ARM/DISARM を10回繰り返すミッションプランの例です。

参考
※ 6:00~12:00 位にかけて紹介した内容について解説されています。