はじめに
ArdupilotでROVER作る際に覚えておくべき配置の基本について記載します。
車体の重心付近にAutopilotを配置できない車体の場合、向きやオフセット位置の設定が必要となります。
これらを設定しないとちゃんと動かないので合わせてください。
注意
RCカーをベースとした車体ではこの設定は不要(ほとんどの部品が重視付近におけるため)ですが
大きめの車体を作成するような場合、重心からズレた位置に部品を配置する場合がありますので、オフセットの設定が必要となります。
対象
| 項目 | 値 |
|---|---|
| ファーム | Ardupilot Rover 4.2 |
| Autopilot | CubePilot(Phixhawk2) |
基本
基本は車体の重心付近に配置する
オフセット設定
Autopilotが重心付近に配置できない場合はオフセット方向の指示が必要です。
GPSに関してはGPSでYAWを取得する場合、GNSSモジュールは水平方向に30cm以上離す必要がありますのでオフセットの設定が必要となります。
設定が必要なパラメータ
・ INS_POS1_X、 INS_POS1_Y、 INS_POS1_Z : 車両重心からIMU までの位置
・ GPS_POS1_X、 GPS_POS1_Y、 GPS_POS1_Z : 車両重心からGNSSモジュール1 までの位置
・ GPS_POS2_X、 GPS_POS2_Y、 GPS_POS2_Z : 車両重心からGNSSモジュール2 までの位置
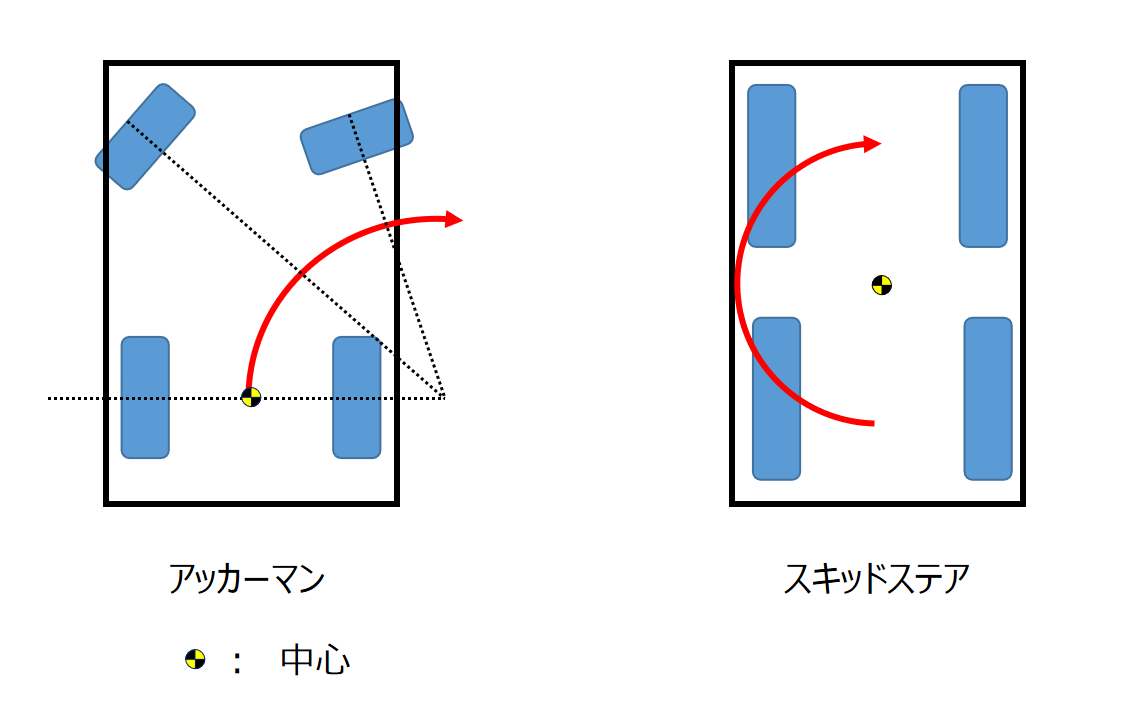
車体の中心をどこに置くか?
Autopilotの場所はパラメータを設定することで指示できますが、車体の中心に関しては操舵方式によって異なりますので注意が必要です。
アッカーマン方式の場合、駆動輪を中心に車体が旋回しますので駆動輪間に重心を指定することでスムーズな動きが得られます。
| 操舵方式 | 車体重心(中心) | 備考 |
|---|---|---|
| アッカーマン | 駆動輪の軸間 | キャスターも含む |
| スキッドステア | 車体中心 | 旋回軸が車体中心にある物すべてが対象 |
イメージしにくいので図を添付します。
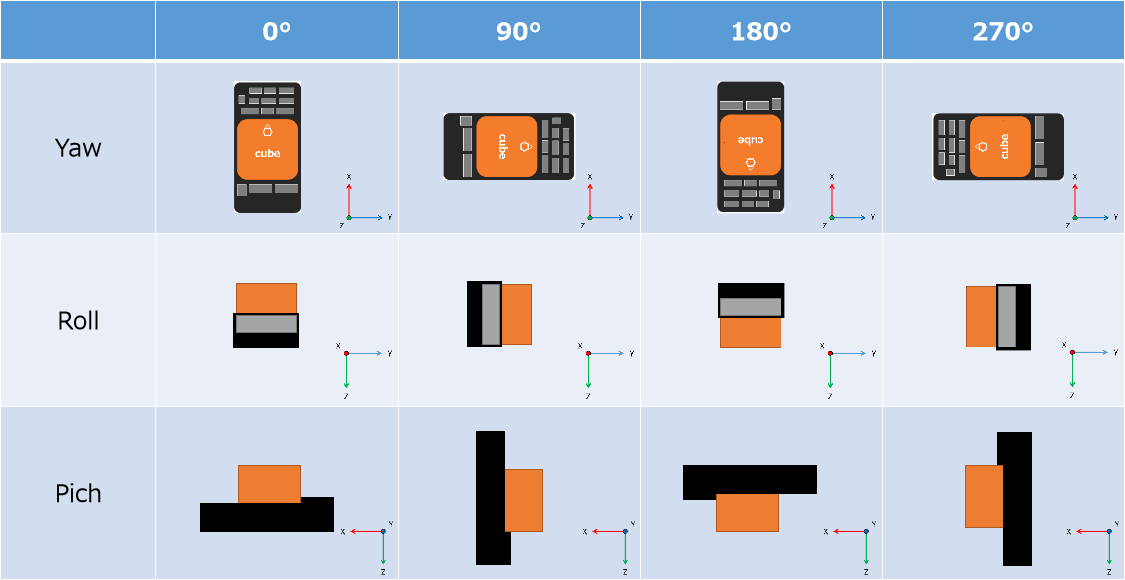
Autopilotの方向を変える場合
ボードが非標準の向き (つまり、矢印が前を向いていない) で取り付ける場合は、 ジャイロのキャリブレーションを行う前にAHRS_ORIENTATIONの設定を行ってください。
設定が必要なパラメータ
・AHRS_ORIENTATION : 詳細
回転方向のイメージ
参考