はじめに
どうも、電気情報工学科のForestと申します。初めてmarkdownをつかうのでなにかおかしくても生暖かい目で見ててだしあす。このアドベントカレンダーは情報系のことが多いなぁ。仕方ないかな。ということで今年のロボコンのことやこれからのロボコンについてをつらつらと語っていきたいと思います。12/16日のことは気にしないでください。台湾にいるときに気付いたんだ、許してくれ。疲れていたんだ。
そもそもロボコンとは
自分が出たロボコンの正式名は「アイデア対決全国高等専門学校ロボットコンテスト」と呼ばれ、高専3大コンテストのひとつです。ちなみにもう二つは「プロコン」と「デザコン」です。毎年競技課題がかわり、それに合わせてロボットを作ります。この大会には、大きい賞として、ロボットのアイデアがすぐれており完成度の高いロボットに贈られる「ロボコン大賞」とトーナメントを勝ち抜いて全てのロボットの頂点となる「全国優勝」があります。ちなみに、ロボコニスト界隈では優勝よりも大賞の方が名誉だったりします(多分、少なくとも自分はそう思ってる)。今年のロボコンは、「ボトルフリップカフェ」というお題で、センシングを駆使した自動制御を使った自動ロボットと、手動ロボットの二台で設置されたテーブルにボトルを立てていき点数を競う競技でした。詳しくはググってみて。
呉高専の愉快なロボットたち
それでは今年に汗と涙と貴重な高校生活の夏休みをささげて作ったロボットたちの話でもしていきたいと思います。これは毎年なんですが、どの高専もAチームとBチームにわかれております。ちなみに自分は今年、Bチームでした。
Aチーム(チーム名:Vic鳥)
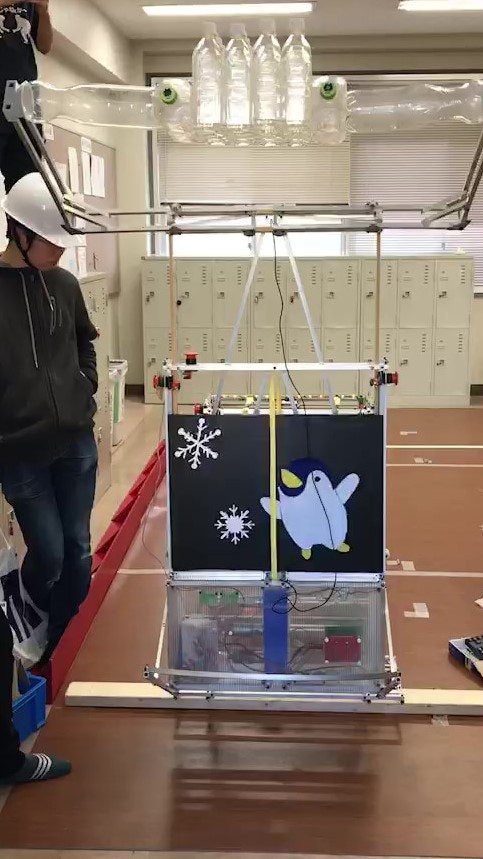
はい、これが全国出場を果たしたロボットです。この子の特徴言えばなんといっても2.4mの高さにあるテーブルに驚異の16本を立てるというスゴ技をしてのけるロボットなのです。これは、点数に加算すると、80点となり今年の大会でもトップクラスの得点力を誇るロボットです。その様子はこちらから(youtubeの動画です)。見てもらっても分かりますけど、得点力がすごいです。しかしこの動画を見てもらった方はわかると思いますが、ロボットが一台しかいないやん、なんでや!キレそう。となる方もいるでしょう。安心してください。なんとこいつは夢の合体ロボなんです。すごいでしょ。上のペットボトルをつかんでるほうが手動ロボット、下のタイヤがついているほうが自動ロボットです。自動ロボットは、ロータリーエンコーダを使った自己位置推定やLRF(laser range finder)と呼ばれるレーザー測距センサを使用してのテーブル検索などをしています。手動ロボットははしご車に使われるベルトと滑車を使った伸縮機構を積んでいます。しかしながら、この子は突然全国大会の予選で動かなくなるトラブルが発生。原因は直前の調整のミスでの重心バランス変化によるものだったらしいです。とても残念でした。自分のお気に入りポイントは、写真にもあるペンギンの「Vic鳥」です。ちなみにこの子はTwitterで活動してる絵師さんに擬人化してもらいました。リンク張っておくのでよろしければどうぞ。(https://twitter.com/d56_daigorou/status/1056208774644424704)

全国大会でのテストランでの80点成功の様子
Bチーム(チーム名:Rebloom)
カワ(・∀・)イイ!! ヤッタネ
やってまいりました我らがBチーム。
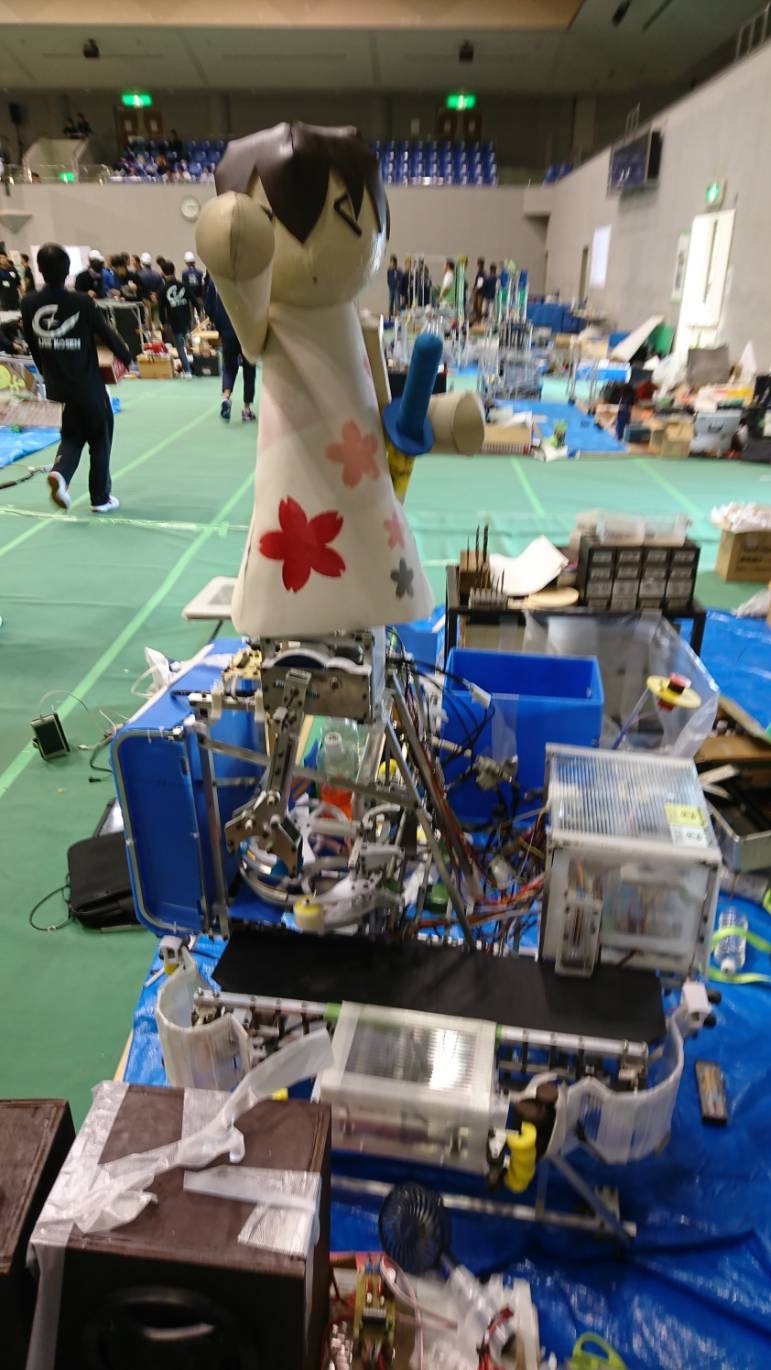
うちの特徴と言ったらなんといっても回転する腕です。人の腕に近づけることでより確率良くたたせれるのではと思い制作しました。が、これが地獄の始まりだったのである。初めの試作段階ではかなりいい成績を出してくれたのでこれはいいのではとなり本番の腕の制作そして実験に入りました。夏休みを使ってそれぞれのテーブルのパラメータをとっていました。しかしながら夏休み終盤、突如として今までのパラメータが使えなくなる悲劇が発生。ちょこちょこ腕の仕様変更があったのでそれのせいかと元に戻してもパラメータは戻らず、電源の電圧も確認しながらやってみたが効果なし。本当に、これは原因不明でした。さらに、腕の制御のかなめであるロータリーエンコーダの値が手動ロボットの方だけ突然飛んでしまうバグも発生。これはプログラム側のミスでなく回路側からノイズらしきものが信号線に入ってきていると検証をして分かったのだが、そもそも腕もまわりは自動機も手動機も同じものを使っているのになぜか手動機でしか現れないし、ノイズの発生源と思われるモータドライバを取り換えても発生する始末でこれも未解決のままでした。そして、大会前日のテストランでまたしてもパラメータが消える事態が発生。結局何もできないまま地区大会は予選で負けてしまいました。
今年のまとめとこれから
A、Bを通してみると結局本番当日に自分の力を発揮できずに負けてしまうという事態でした。このことは、しっかりと重く受け止めていかなければならないと思うところであります。来年からも自動制御という課題は続くそうです。自動制御といっても自分にもこの部活にもまったくもってノウハウがない未知の世界です。これからの世界はAIなどを使ったロボットの自動制御などをする機会が増えてきているいま、しっかりとこのロボコンで技術を身に着けれたらと思います。さて、話は変わりますが自分は自動制御を学ぶ傍ら四輪独立ステアリングという特殊な足回りを開発しています。この話は今度の技術LTで話したいと思っているのでぜひ来てください。とてもロマンのある足回りを皆さんに見せれたらと思っています。お楽しみに。ここまで見てくださりありがとうございました。