1. 準備
点を扱う struct があると便利なので定義します。
struct Point {
double x, y;
Point() = default;
Point(double x_, double y_): x(x_), y(y_) {}
Point operator+(const Point& rhs) const { return Point(x + rhs.x, y + rhs.y); }
Point operator-(const Point& rhs) const { return Point(x - rhs.x, y - rhs.y); }
Point operator*(double scalar) const { return Point(x * scalar, y * scalar); }
Point operator/(double scalar) const { return Point(x / scalar, y / scalar); }
double length() const { return std::sqrt(lengthSq()); }
double lengthSq() const { return x * x + y * y; }
double distanceFrom(const Point& rhs) const { return (*this - rhs).length(); }
double distanceFromSq(const Point& rhs) const { return (*this - rhs).lengthSq(); }
friend Point operator*(double scalar, const Point& rhs) { return Point(scalar * rhs.x, scalar * rhs.y); }
friend std::istream& operator>>(std::istream& is, Point& rhs) { return is >> rhs.x >> rhs.y; }
};
次に三角形を扱う struct を定義します。今回はこれに五心の座標を求めるメンバ関数を追加していきます。
struct Triangle {
Point a, b, c;
Triangle(const Point& a_, const Point& b_, const Point& c_) :a(a_), b(b_), c(c_) {}
double getAngleA() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return std::acos((-dist_a * dist_a + dist_b * dist_b + dist_c * dist_c) / (2 * dist_b * dist_c));
}
double getAngleB() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return std::acos((dist_a * dist_a - dist_b * dist_b + dist_c * dist_c) / (2 * dist_c * dist_a));
}
double getAngleC() const { return std::acos(-1.0) - getAngleA() - getAngleB(); }
friend std::istream& operator>>(std::istream& is, Triangle& rhs) { return is >> rhs.a >> rhs.b >> rhs.c; }
};
また、これとは別に
$\rm\triangle ABC$ と点 $\rm P$ があり、面積比が $\triangle{\rm PBC}:\triangle{\rm PCA}:\triangle{\rm PAB}=p:q:r$ の時、$\rm P$ の位置ベクトルを計算しておきます。
-
$\rm P$ が $\rm\triangle ABC$ の内部の場合
条件より、$$p\overrightarrow{\rm PA}+q\overrightarrow{\rm PB}+r\overrightarrow{\rm PC}=\vec{0}$$が成立します。(こちらのサイトを参照)したがって、$$\vec p=\frac{p\vec a+q\vec b+r\vec c}{p+q+r}\tag1$$ -
外部の場合
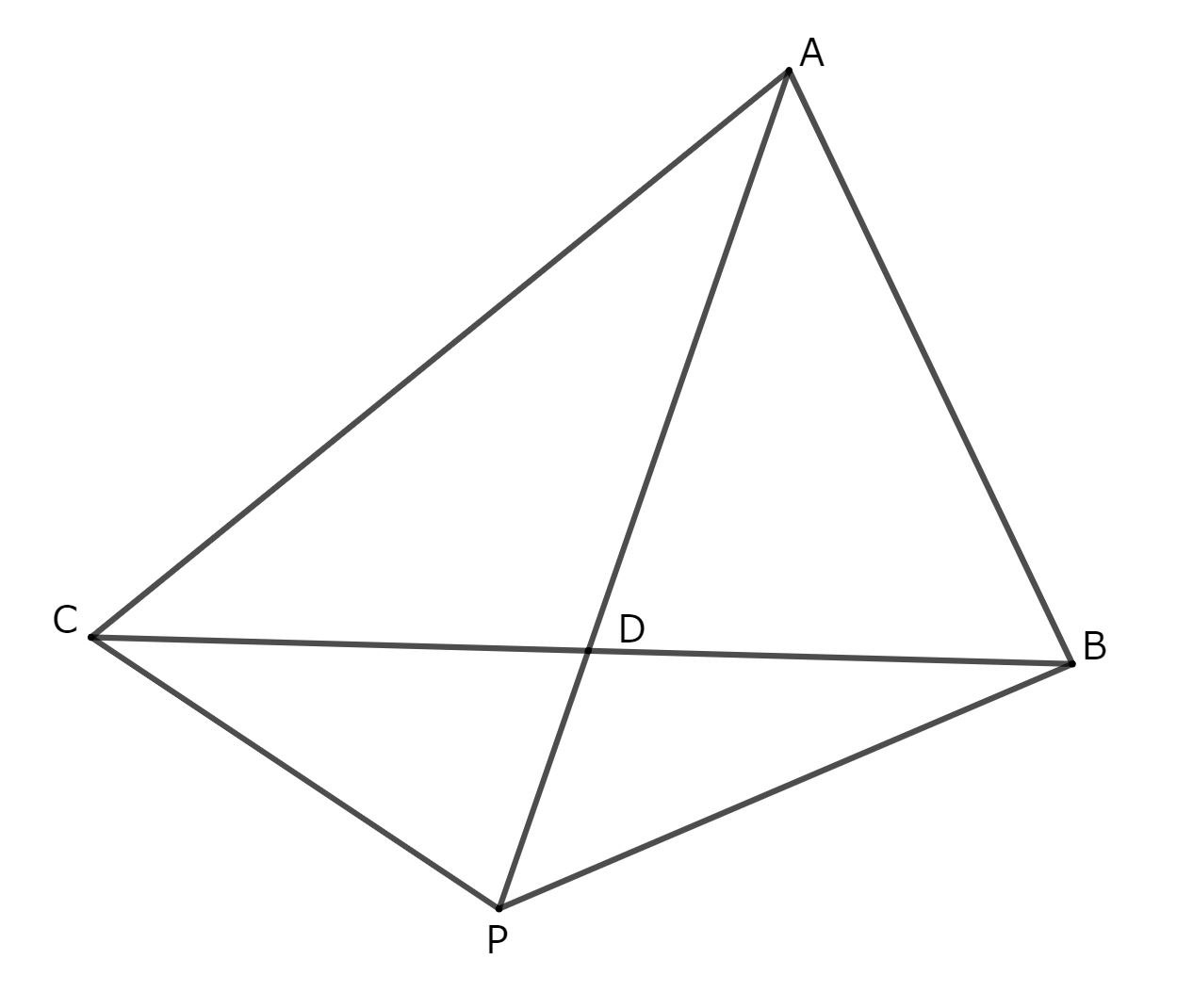
上図の場合を考えます。このとき、${\rm BD:CD}=r:q$ なので、$$\vec d=\frac{q\vec b+r\vec c}{q+r}$$また、${\rm\triangle ABC:\triangle PBC}=q+r-p:p$ なので、$${\rm AD:PD}=(q+r-p):p$$よって、点 $\rm P$ は $\rm AD$ を $q+r:p$ に外分する点なので、$$\vec p=\frac{-p\vec a+(q+r)\vec d}{-p+q+r}$$$$=\frac{-p\vec a+(q+r)\frac{q\vec b+r\vec c}{q+r}}{-p+q+r}$$$$=\frac{-p\vec a+q\vec b+r\vec c}{-p+q+r}\tag2$$
2. コード
重心
一番簡単です。
Point getCentroid() const {
return (a + b + c) / 3;
}
外心
$\rm\triangle ABC$ の外心 $\rm O$ の位置ベクトルを計算します。
$\rm\triangle BPC,\triangle CPA,\triangle APB$ の面積をそれぞれ $p,q,r$、$\angle{\rm BAC}=\alpha,\angle{\rm CBA}=\beta,\angle{\rm ACB}=\gamma$、外接円の半径を $R$ とおきます。
-
$\rm O$ が $\rm\triangle ABC$ の内部にある場合
円周角の定理より $\angle{\rm BPC}=2\alpha$ なので、$$p=\frac12R^2\sin2\alpha$$同様にして
$$q=\frac12R^2\sin2\beta, r=\frac12R^2\sin2\gamma$$よって、$$p:q:r=\sin2\alpha:\sin2\beta:\sin2\gamma$$
したがって、$(1)$より、$$\vec{o}=\frac{\sin2\alpha\vec a+\sin2\beta\vec b+\sin2\gamma\vec c}{\sin2\alpha+\sin2\beta+\sin2\gamma}$$ -
外部の場合
$$q=\frac12R^2\sin2\beta,r=\frac12R^2\sin2\gamma$$内角 $\angle{\rm BPC}=2\pi-2\alpha$ なので、$$p=\frac12R^2\sin(2\pi-2\alpha)=-\frac12R^2\sin2\alpha$$したがって、$(2)$より、$$\vec{o}=\frac{-(-\sin2\alpha\vec a)+\sin2\beta\vec b+\sin2\gamma\vec c}{-(-\sin2\alpha)+\sin2\beta+\sin2\gamma}$$$$=\frac{\sin2\alpha\vec a+\sin2\beta\vec b+\sin2\gamma\vec c}{\sin2\alpha+\sin2\beta+\sin2\gamma}$$
Point getCircumCenter() const {
double
sin2a = std::sin(2 * getAngleA()),
sin2b = std::sin(2 * getAngleB()),
sin2c = std::sin(2 * getAngleC());
return (sin2a * a + sin2b * b + sin2c * c) / (sin2a + sin2b + sin2c);
}
【追記】 角度で計算すると誤差が大きくなってしまうので、長さに変えて計算する方が良いです。
Point getCircumCenter() const {
double
d_a = (b - c).lengthSq(),
d_b = (c - a).lengthSq(),
d_c = (a - b).lengthSq(),
t_a = d_a * (-d_a + d_b + d_c),
t_b = d_b * (d_a - d_b + d_c),
t_c = d_c * (d_a + d_b - d_c),
s = t_a + t_b + t_c;
return t_a / s * a + t_b / s * b + t_c / s * c;
}
内心
同様に、位置ベクトルを計算します。
$\rm\triangle ABC$ の内心を $\rm I$、内接円の半径を $r$ とおくと、$$\triangle{\rm BIC}=\frac12ar,\triangle{\rm CIA}=\frac12br,\triangle{\rm AIB}=\frac12cr$$となるので、$${\rm \triangle BIC:\triangle CIA:\triangle AIB}=a: b:c$$となります。したがって、$(1)$より、$$\vec i=\frac{a\vec a+b\vec b+c\vec c}{a+b+c}$$
Point getInnerCenter() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return (dist_a * a + dist_b * b + dist_c * c) / (dist_a + dist_b + dist_c);
}
垂心
同様に、位置ベクトルを計算します。
$\rm\triangle ABC$ において、外心を $\rm O$、重心を $\rm G$、垂心を $\rm H$とおくと $\rm{O,G,H}$ は一直線上にあり,$${\rm OG:GH}=1:2$$が成立する(オイラー線)ので、$$\vec g=\frac{2\vec o+\vec h}3$$よって、$$\vec h=3\vec g-2\vec o$$
Point getOrthoCenter() const {
return a + b + c - 2 * getCircumCenter();
}
傍心
同様に、位置ベクトルを計算します。
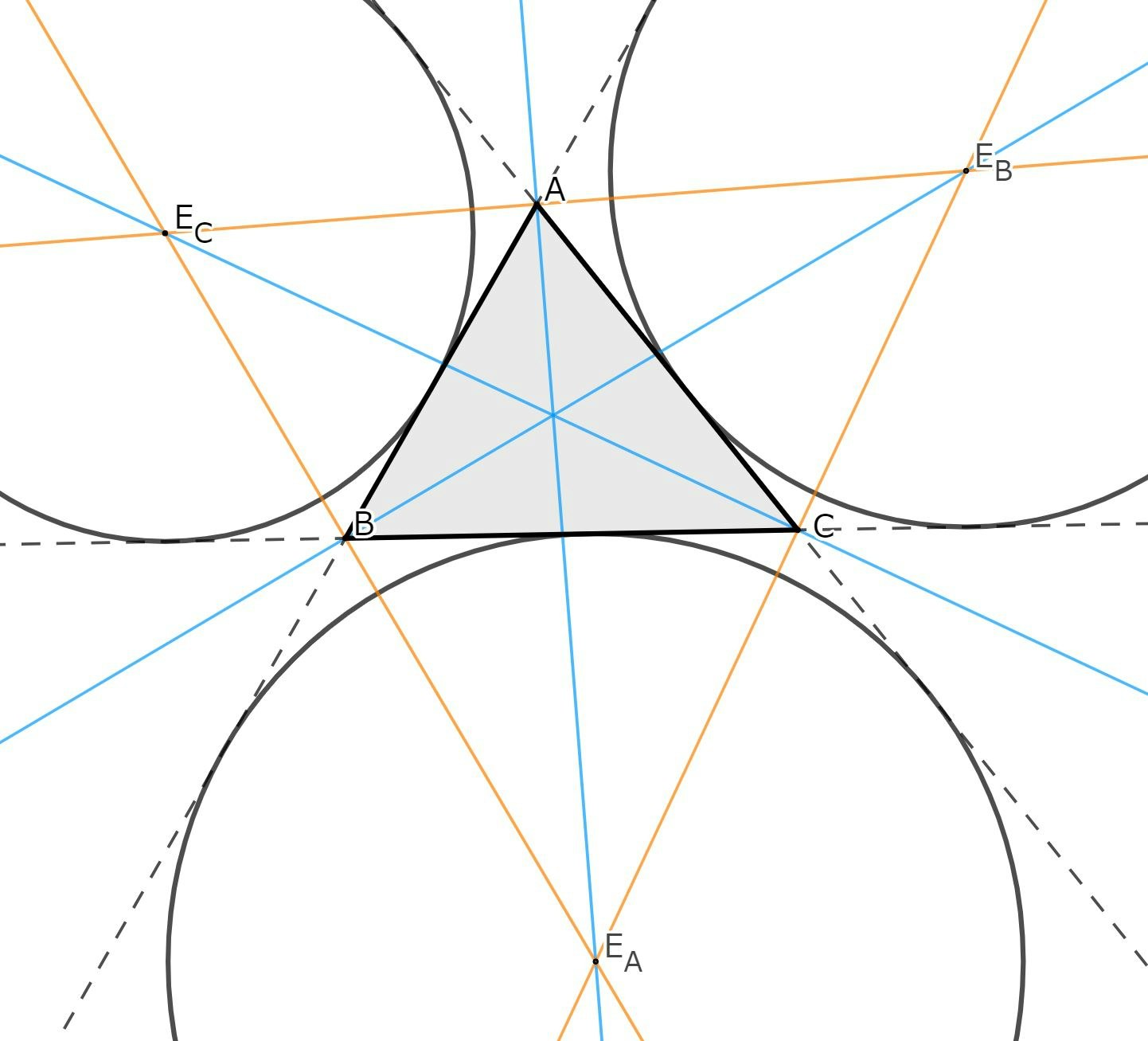
上図のように $\rm\triangle ABC$ に対して傍心 $\rm E_A,E_B,E_C$ をそれぞれおきます。接線はその接点を通る半径に垂直なので、$${\rm\triangle E_ABC:\triangle E_ACA:\triangle E_AAB}=a: b:c$$したがって、$(2)$ より、$$\overrightarrow{E_A}=\frac{-a\vec a+b\vec b+c\vec c}{-a+b+c}$$同様にして、$$\overrightarrow{E_B}=\frac{a\vec a-b\vec b+c\vec c}{a-b+c}, \overrightarrow{E_C}=\frac{a\vec a+b\vec b-c\vec c}{a+b-c}$$
Point getExcenterA() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return (-dist_a * a + dist_b * b + dist_c * c) / (-dist_a + dist_b + dist_c);
}
Point getExcenterB() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return (dist_a * a - dist_b * b + dist_c * c) / (dist_a - dist_b + dist_c);
}
Point getExcenterC() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return (dist_a * a + dist_b * b - dist_c * c) / (dist_a + dist_b - dist_c);
}
3. まとめ
これらをまとめたコードです。
struct Point {
double x, y;
Point() = default;
Point(double x, double y)
: x(x_)
, y(y_) {}
Point operator+(const Point& rhs) const { return Point(x + rhs.x, y + rhs.y); }
Point operator-(const Point& rhs) const { return Point(x - rhs.x, y - rhs.y); }
Point operator*(double scalar) const { return Point(x * scalar, y * scalar); }
Point operator/(double scalar) const { return Point(x / scalar, y / scalar); }
double length() const { return std::sqrt(lengthSq()); }
double lengthSq() const { return x * x + y * y; }
double distanceFrom(const Point& rhs) const { return (*this - rhs).length(); }
double distanceFromSq(const Point& rhs) const { return (*this - rhs).lengthSq(); }
friend Point operator*(double scalar, const Point& rhs) { return Point(scalar * rhs.x, scalar * rhs.y); }
friend std::istream& operator>>(std::istream& is, Point& rhs) { return is >> rhs.x >> rhs.y; }
};
struct Triangle {
Point a, b, c;
Triangle(const Point& a, const Point& b, const Point& c)
: a(a)
, b(b)
, c(c) {}
double getAngleA() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return std::acos((-dist_a * dist_a + dist_b * dist_b + dist_c * dist_c) / (2 * dist_b * dist_c));
}
double getAngleB() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return std::acos((dist_a * dist_a - dist_b * dist_b + dist_c * dist_c) / (2 * dist_c * dist_a));
}
double getAngleC() const { return std::acos(-1.0) - getAngleA() - getAngleB(); }
//重心
Point getCentroid() const {
return (a + b + c) / 3;
}
//外心
Point getCircumCenter() const {
double
d_a = (b - c).lengthSq(),
d_b = (c - a).lengthSq(),
d_c = (a - b).lengthSq(),
t_a = d_a * (-d_a + d_b + d_c),
t_b = d_b * (d_a - d_b + d_c),
t_c = d_c * (d_a + d_b - d_c),
s = t_a + t_b + t_c;
return t_a / s * a + t_b / s * b + t_c / s * c;
}
//内心
Point getInnerCenter() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return (dist_a * a + dist_b * b + dist_c * c) / (dist_a + dist_b + dist_c);
}
//垂心
Point getOrthoCenter() const {
return a + b + c - 2 * getCircumCenter();
}
//傍心 A
Point getExcenterA() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return (-dist_a * a + dist_b * b + dist_c * c) / (-dist_a + dist_b + dist_c);
}
//傍心 B
Point getExcenterB() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return (dist_a * a - dist_b * b + dist_c * c) / (dist_a - dist_b + dist_c);
}
//傍心 C
Point getExcenterC() const {
double
dist_a = b.distanceFrom(c),
dist_b = c.distanceFrom(a),
dist_c = a.distanceFrom(b);
return (dist_a * a + dist_b * b - dist_c * c) / (dist_a + dist_b - dist_c);
}
friend std::istream& operator>>(std::istream& is, Triangle& rhs) { return is >> rhs.a >> rhs.b >> rhs.c; }
};