はじめに
AIによって制御されるキャラクター(以下エージェント)のナビゲーションには大局的なナビゲーションと局所的なナビゲーションがあります。
大局的なナビゲーション:エージェントをA地点からB地点まで移動させる際に「ナビゲーションメッシュ」や「2D・3Dグリッド」等のナビゲーションデータから経路探索アルゴリズムを用いて望ましい経路を導き出す典型的なナビゲーションです。壁や岩、エージェントが侵入できない建物等の静的な障害物はナビゲーションデータから取り除かれます。エージェントが経路を辿る際にはあたかも、静的な障害物を避けるような振る舞いをします。
局所的なナビゲーション:動的な障害物(人や動物、車等)を回避するための極短期間のナビゲーションです。目的地へは向かいつつも障害物を回避するために少しだけ進路を変更します。
殆どの場面で大局的なナビゲーションはエージェントを良い感じに目的地へ導いてくれますが、道中に有る動的障害物に対してのナビゲートはしてくれません。エージェント同士が向かい合えば当たり前のように正面衝突し衝突判定の跳ね返りで何とか避けるような動きをします。
そこで局所的なナビゲーションとを組み合わせることで相手を避けるといった、より自然で違和感のないナビゲートでエージェントを更に知的に見せる事が出来ます。
この記事ではReciprocal Velocity Obstacles for Real-Time Multi-Agent Navigationにある論文やライブラリを参考に、Unreal Engine 4(UE4)にてReciprocal Velocity Obstacles(以下RVO)を実装していきます。
プロジェクトはこちらから
プロジェクト内のシーンを実行してみる
プロジェクトには3つのシーンがあり、それぞれ次のような結果を見ることが出来ます。
結果1. 実装したRVOとビルトインのRVOとの比較実装したRVOとビルトインのRVOとの比較 pic.twitter.com/rYIuZnvpuv
— PavilionDV7 (@Dv7Pavilion) 2018年11月2日
結果2. 回避の積極性パラメータの比較回避の積極性パラメータの比較 pic.twitter.com/IH7O7HTu5M
— PavilionDV7 (@Dv7Pavilion) 2018年11月2日
結果3. 静的な障害物がある環境での動作静的な障害物がある環境での動作 pic.twitter.com/L3XtOTGn7l
— PavilionDV7 (@Dv7Pavilion) 2018年11月2日
RVOの実装
RVOはBP_AGENT_RVOに実装されています。
CalculateRVOVelocity関数の呼び出し
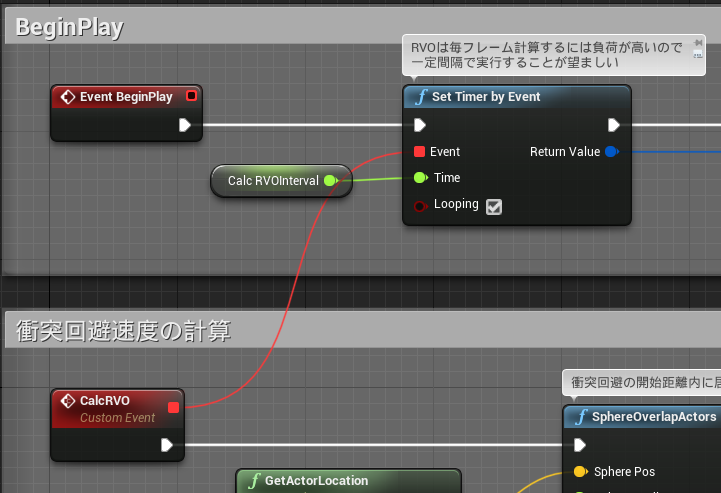
衝突回避速度の計算の呼び出しはカスタムイベントのCalcRVOイベントにあります。
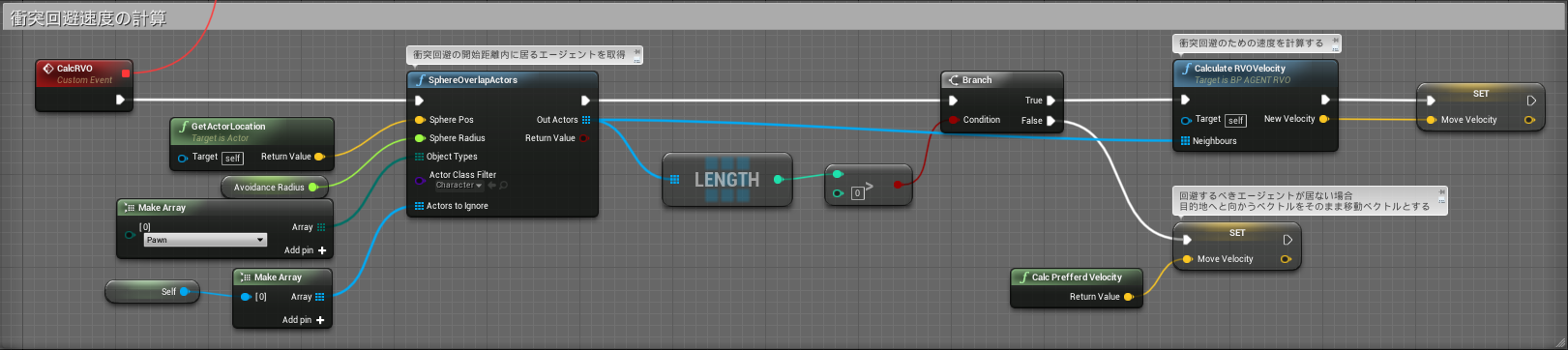
CalcRVOイベントはBegin PlayにてSet Timer by Eventで一定間隔で呼ばれるようにしています。
CalcRVOイベントではエージェントの近くにいる動的障害物(近傍領域内にいる動的障害物)を知るために、Sphere Overlap Actorsノードを使用しています。参考にしたRVO Library v1.1.1では近くにいる動的障害物を探すためにk-d木を採用しています。(自分はk-d木を実装したことが無いので手軽に同様の結果を得られるSphereOverlapActorsを採用しました。)
近くにいる障害物が何もなかった場合、CalcPrefferdVelocity関数で目的地(もしくは目的地に到達するために通る必要のある位置)へと向かう速度を計算し、自身の移動速度とします。
避けるべき障害物があるなら、CalculateRVOVelocity関数で衝突回避速度を計算します。
CalculateRVOVelocity関数
候補速度の選定
衝突回避速度を求めるには、最初に候補速度を決める必要があります。いくつかの候補速度を作成し、それらにどれだけのペナルティがあるのかを求め、最終的にペナルティが最も小さい候補速度を衝突回避速度とします。
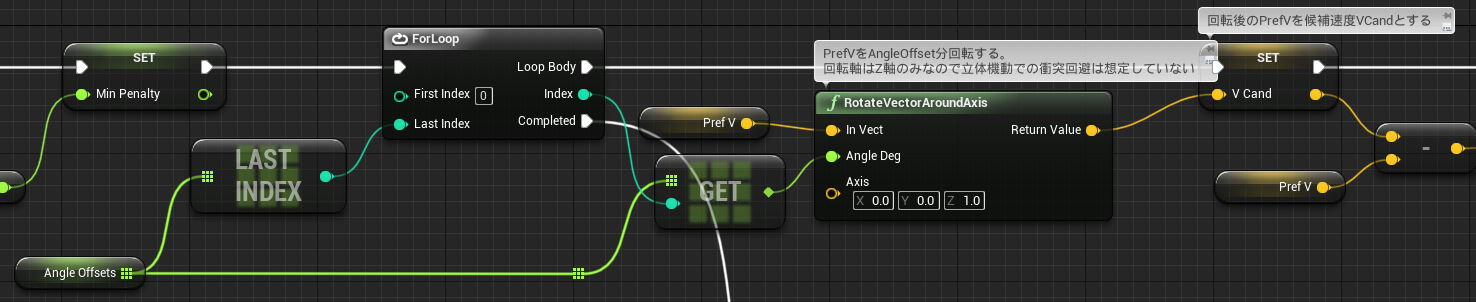
今回のプロジェクトでは上の図のようにRotateVectorAroundAxisノードを使ってPrefV(最も望ましい速度)をAngleDeg度回転させていますが、何度回転するかは変数AngleOffsets配列にて決め打ちしています。
Time to Collisionの計算
候補速度を選んだ後は衝突までの時間(Time to Collision)を計算します。
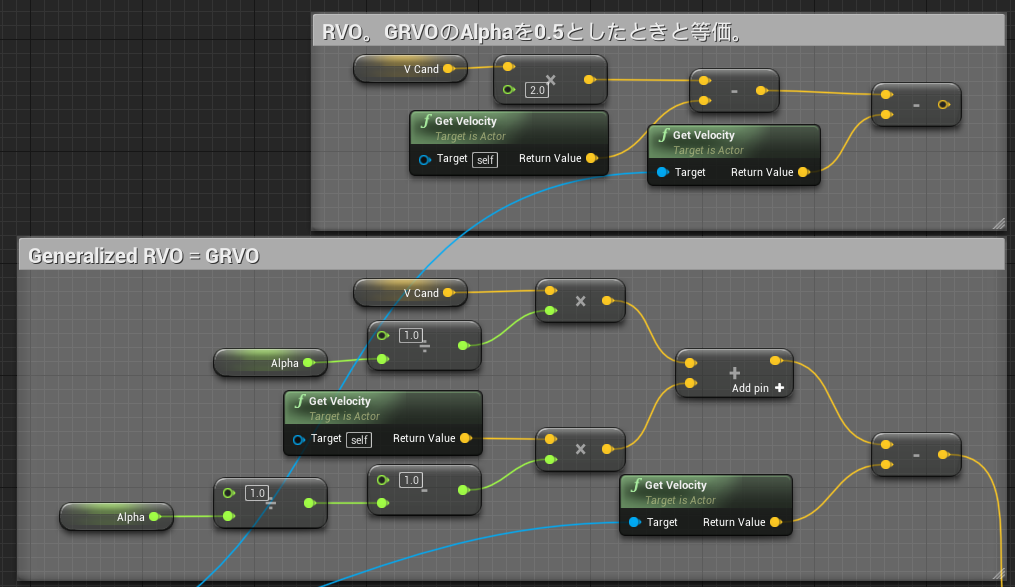
上の図はTimetoCollision関数に渡すvABを求めている箇所です。
これは論文にもある
RVO(責任の分配率$\alpha_B^A = \alpha_A^B = \frac{1}{2}$)の場合
\begin{align}
R V O _ { B } ^ { A } \left( \mathbf { v } _ { B } , \mathbf { v } _ { A } \right) &= \left\{ \mathbf { v } _ { A } ^ { \prime } | 2 \mathbf { v } _ { A } ^ { \prime } - \mathbf { v } _ { A } \in V O _ { B } ^ { A } \left( \mathbf { v } _ { B } \right) \right\}
\\
\lambda \left( \mathbf { p } _ { A } , 2 \mathbf { v } _ { A } ^ { \prime } - \mathbf { v } _ { A } - \mathbf { v } _ { B } \right) &= B \oplus - A
\end{align}
GRVOの場合
\begin{align}
R V O _ { B } ^ { A } \left( \mathbf { v } _ { B } , \mathbf { v } _ { A } , \alpha _ { B } ^ { A } \right) &= \left\{ \mathbf { v } _ { A } ^ { \prime } | \frac { 1 } { \alpha _ { B } ^ { A } } \mathbf { v } _ { A } ^ { \prime } + \left( 1 - \frac { 1 } { \alpha _ { B } ^ { A } } \right) \mathbf { v } _ { A } \in V O _ { B } ^ { A } \left( \mathbf { v } _ { B } \right) \right\}
\\
\lambda \left( \mathbf { p } _ { A } , \frac { 1 } { \alpha _ { B } ^ { A } } \mathbf { v } _ { A } ^ { \prime } + \left( 1 - \frac { 1 } { \alpha _ { B } ^ { A } } \right) \mathbf { v } _ { A } - \mathbf { v } _ { B } \right) &= B \oplus - A
\end{align}
が、そのまま実装された形となります。
候補速度のペナルティの計算
ある候補速度が適した衝突回避速度なのかを調べるためにその候補速度に対するペナルティを求めます。
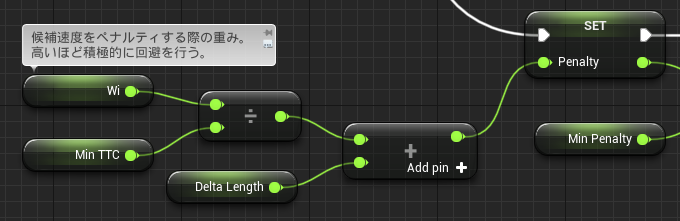
上の図ではペナルティを計算していますが、これは論文での
\text { penalty } _ { i } \left( \mathbf { v } _ { i } ^ { \prime } \right) = w _ { i } \frac { 1 } { t c _ { i } \left( \mathbf { v } _ { i } ^ { \prime } \right) } + \left\| \mathbf { v } _ { i } ^ { \mathrm { pref } } - \mathbf { v } _ { i } ^ { \prime } \right\|
です。
Time to Collision関数の中身

スクショを撮るためにノードの位置を変更していますが、TimeToCollision関数で行っている計算は論文の
\begin{align}
&w = P_B - P_A \\
&v = v_B - v_A \\
&a = v \cdot v \\
&c = w \cdot w - (r_A + r_B)^2 \\
&b = −w \cdot v = w \cdot (v_A − v_B) \\
\\
&\tau^\pm = (b \pm \sqrt{b^2 − ac}) / a \\
\end{align}
と同様です。
$v$や$r_A + r_B$については引数に渡された時点で計算済みですので、この関数内では省略されています。
2018/11/18 追記
Time To Collision関数の計算は線分と球(もしくは円)との衝突判定とほぼ内容は同じです。
ゲームつくろー!3D衝突編 その24 レイと球の貫通点
おわりに
UE4にはRVOが既にビルトインされているのですが、勉強のために実装してみました。
力試しとして論文だけで実装してみようかなと思いましたが、無理でした。論文からプログラムに落とし込める人はすごいですね。
幸いReciprocal Velocity Obstacles for Real-Time Multi-Agent NavigationにはC++での実装例が紹介されていましたし、他にも多くの実装例が見つかるのでUE4で実装するのにそれほど苦労しませんでした。
Velocity ObstacleにはRVOの他にもThe Hybrid Reciprocal Velocity Obstacle(HRVO)やOptimal Reciprocal Collision Avoidance(ORCA)、Human Like等々、派生が多くありますので、ゆっくりと勉強しながら解説できればなと思います。
参考資料
http://gamma.cs.unc.edu/RVO/
RVOアルゴリズムのルーツ(?)。プロジェクトデータもあるので是非。
https://hasht.hatenablog.com/entry/2018/04/19/193301
調べた中で唯一の日本語で解説されたブログ。とても有り難かった。
https://software.intel.com/en-us/articles/reciprocal-collision-avoidance-and-navigation-for-video-games
Intel Developer Zoneにある衝突回避アルゴリズムについての記事。パフォーマンス面にフォーカスされている。