内容
・事前に現場にて測位計測しないと作成できない走行用マップの作成を自動化.
・GPSを使った自律移動ロボットやドローン向けのマップとして色々応用できると思う.
制作物紹介
YouTube↓(音量注意)
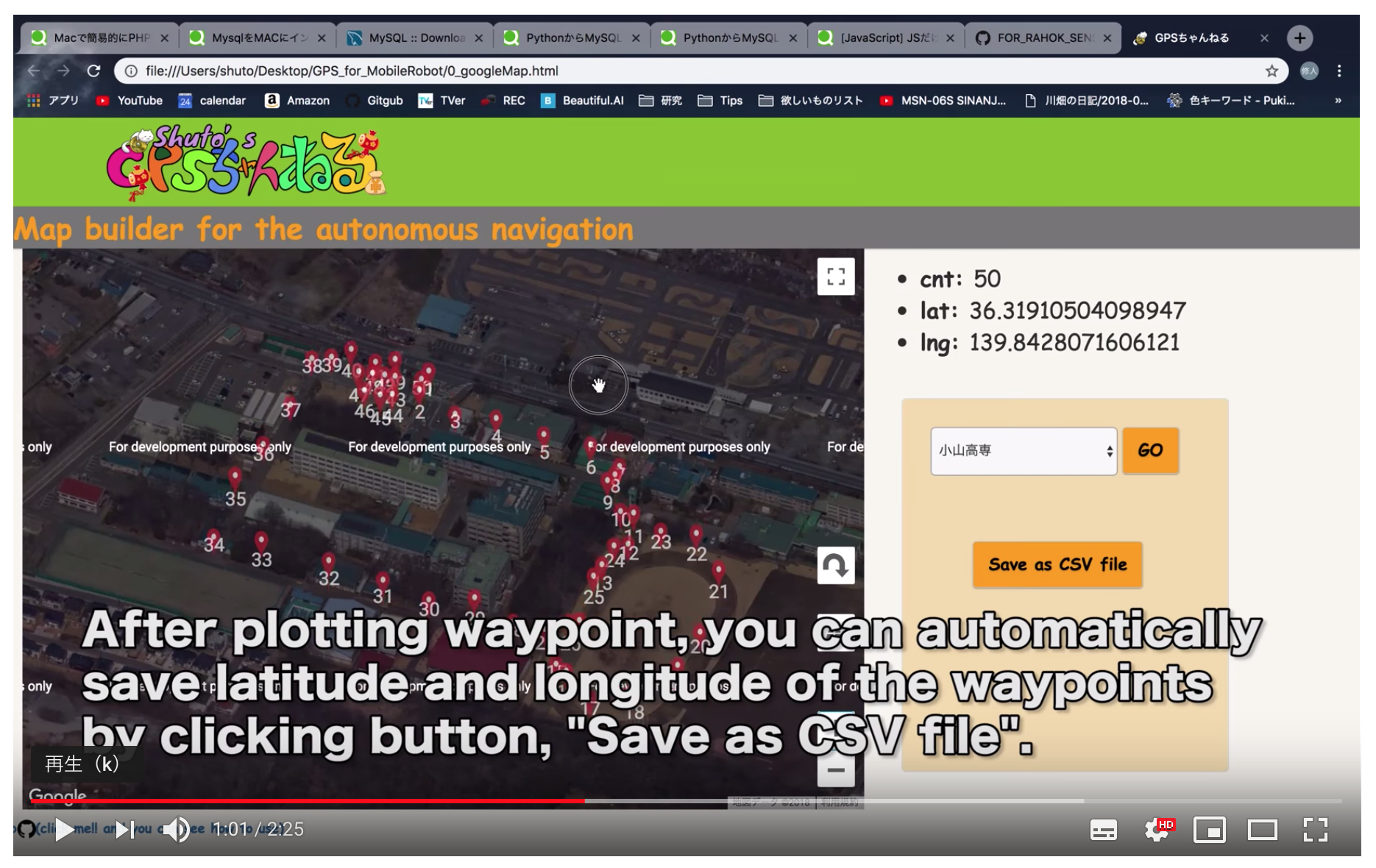
とまあこんなかんじで
waypointプロットするだけであとは自動で座標取得
→平面座標系への変換
→スタート地点を中心にオフセット処理
→マップを作成してくれます
環境
・JavaScript
・HTML
・CSS
・Python
・Google Maps JavaScript API
・ShellScript
使い方
以下GithubからダウンロードしてYouTubeの動画どおりに利用してください.
詳細,各プログラムの解説もGithubで行っています.
今回のコアな部分
流れ
・3つの地点候補から1つを選択させる
・選択された地点に移動
・スタート地点からゴール地点までの間に,waypointを任意の感覚でプロット
・プロットされたwaypointの全位置座標(緯度,経度)をCSVファイルで保存
・ShellScriptで各Pythonプログラムを逐次実行,経緯度座標を直行平面座標へ変換,グラフとして描写
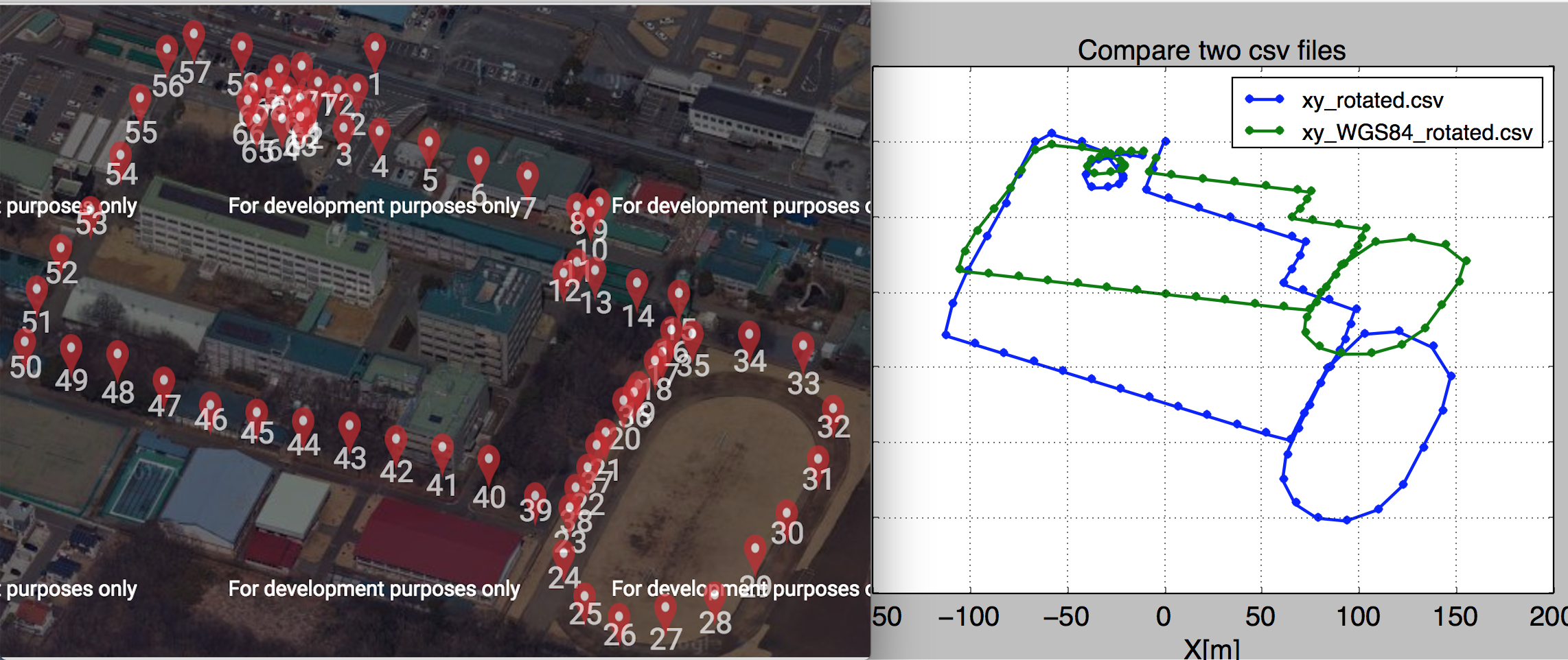
・緑の線は,高専ときのWGS84座標系に変換したバージョン(間違ってる)
今回のコアであるJS部分のメモ
0_googleMap.html
<!--以下JavaScript-->
<script>
var array0 = [['marker','latitude','longitude']];
var table = array0;
// 場所選択時における画面遷移
function move(st_lat,st_lng) {
// マップの初期化
var map = new google.maps.Map(document.getElementById('map'), {
zoom: 19,
center: {lat: st_lat, lng: st_lng},
mapTypeId: google.maps.MapTypeId.SATELLITE ,
});
// クリックイベントを追加
map.addListener('click', function(e) {
getClickLatLng(e.latLng, map);
});
}
function calcBmi(){
var place = document.getElementById('place').value;
// ここの座標かえるだけでいろいろ応用可能
if(place == 'oyama'){
move(36.318940,139.842150);// 小山高専
}else if(place=='tsukuba'){
move(36.080349,140.115203);// つくばチャレンジ会場
}else if(place=='daigaku'){
move(36.109101,140.103641); // 筑波大学キャンパス
}
}
var click_count = 0;
function initMap() {
// マップの初期化
var map = new google.maps.Map(document.getElementById('map'), {
zoom: 19,
center: {lat:36.38992, lng: 139.06065},
mapTypeId: google.maps.MapTypeId.SATELLITE ,
});
// クリックイベントを追加
map.addListener('click', function(e) {
getClickLatLng(e.latLng, map);
});
}
function getClickLatLng(lat_lng, map) {
click_count++;
str_cnt = String(click_count);
str_lat = String(lat_lng.lat());
str_lng = String(lat_lng.lng());
var array1 = [str_cnt, str_lat, str_lng];
array0.push(array1);
// 座標を表示
document.getElementById('lat').textContent = lat_lng.lat();
document.getElementById('lng').textContent = lat_lng.lng();
document.getElementById('cnt').textContent = click_count;
// マーカーを設置
var marker = new google.maps.Marker({
position: lat_lng,
map: map,
animation: google.maps.Animation.BOUNCE ,
opacity: 0.7,
label: {
text:""+click_count,
color: "white" ,
fontSize: "20px" ,
},
icon: {
url: "./fig/marker.png" ,
scaledSize: new google.maps.Size(15,30) ,
},
});
var size = new google.maps.Size( 200, 200 ) ;
// 座標の中心をずらす
map.panTo(lat_lng);
}
// CSVファイルに出力するための関数
var downloadCsv = (function() {
var tableToCsvString = function(table) {
var str = '\uFEFF';
for (var i = 0, imax = table.length - 1; i <= imax; ++i) {
var row = table[i];
for (var j = 0, jmax = row.length - 1; j <= jmax; ++j) {
str += '"' + row[j].replace('"', '""') + '"';
if (j !== jmax) {
str += ',';
}
}
str += '\n';
}
return str;
};
var createDataUriFromString = function(str) {
return 'data:text/csv,' + encodeURIComponent(str);
}
var downloadDataUri = function(uri, filename) {
var link = document.createElement('a');
link.download = filename;
link.href = uri;
document.body.appendChild(link);
link.click();
document.body.removeChild(link);
};
return function(table, filename) {
if (!filename) {
filename = 'output.csv';
}
var uri = createDataUriFromString(tableToCsvString(table));
downloadDataUri(uri, filename);
};
})();
// CSVに出力
function save(){
downloadCsv(table);
}
</script>
// Google Maps JavaScript API (開発者向け)の呼び出し
<script src="https://maps.googleapis.com/maps/api/js?signed_in=true&callback=initMap" async defer></script>
制作背景
・高専ときの研究,「GPS用いた自律移動ロボット」に必要なマップ作成が地味で大変な作業だった.(冬とかめっちゃ寒かった)
・これ自動化できたら便利じゃね?👀ってなった.
・高専ときの先生にあげた
・喜んでた