SENSYN ROBOTICS(センシンロボティクス) Advent Calendar 2019 の 20日目 担当の @Chitama です。
前回に引き続き、AIコンピューターを乗せた自律走行型のロボットを作ってみます。
自律走行型のロボットを走らせるまで
- 必要な部品を揃える
- ハードウェアを組み立てる ← 今回はココ
- ソフトウェアのセットアップする
- 自律走行を試してみる
2. ハードウェアを組み立てる
今回の流れ。
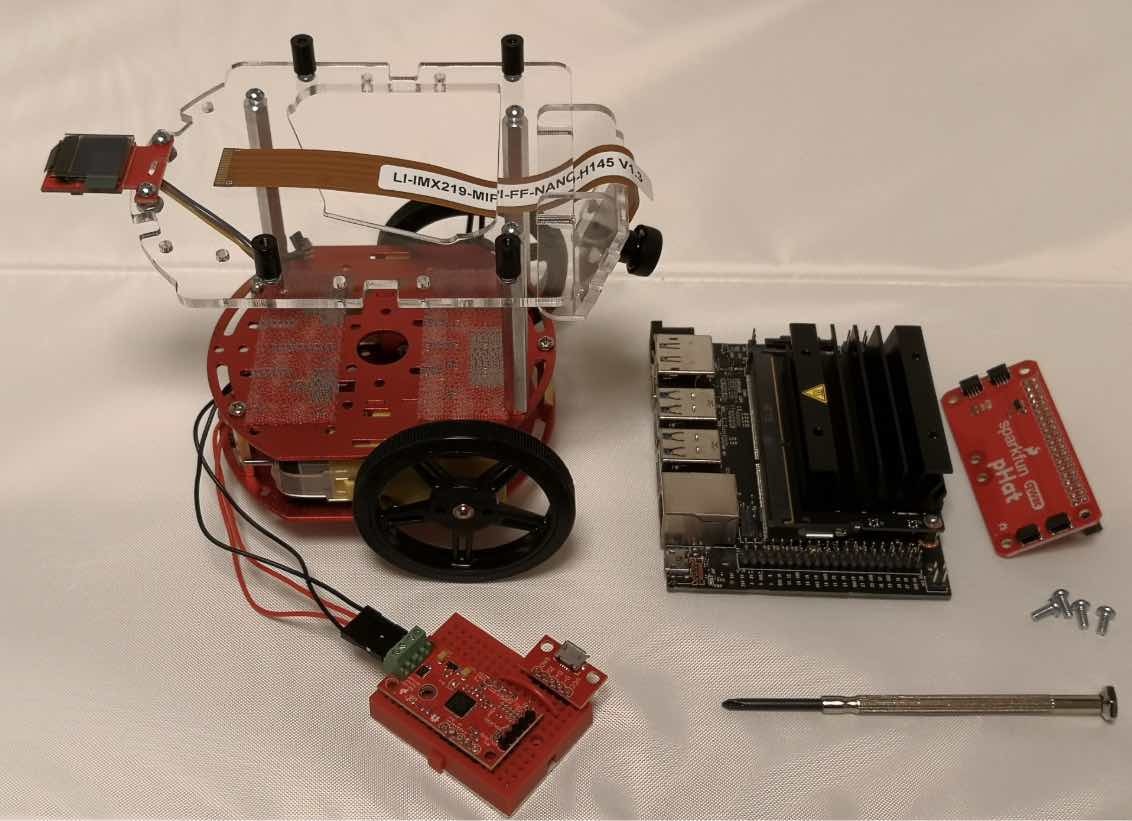
2-1. 部品の確認
2-2. 2層の円形メインロボティクスシャーシの組み立て
2-3. カメラの組み立てと設置
2-4. モータードライバーの組み立て
2-5. メインシャーシへの各パーツの取り付け
2-1. 部品の確認
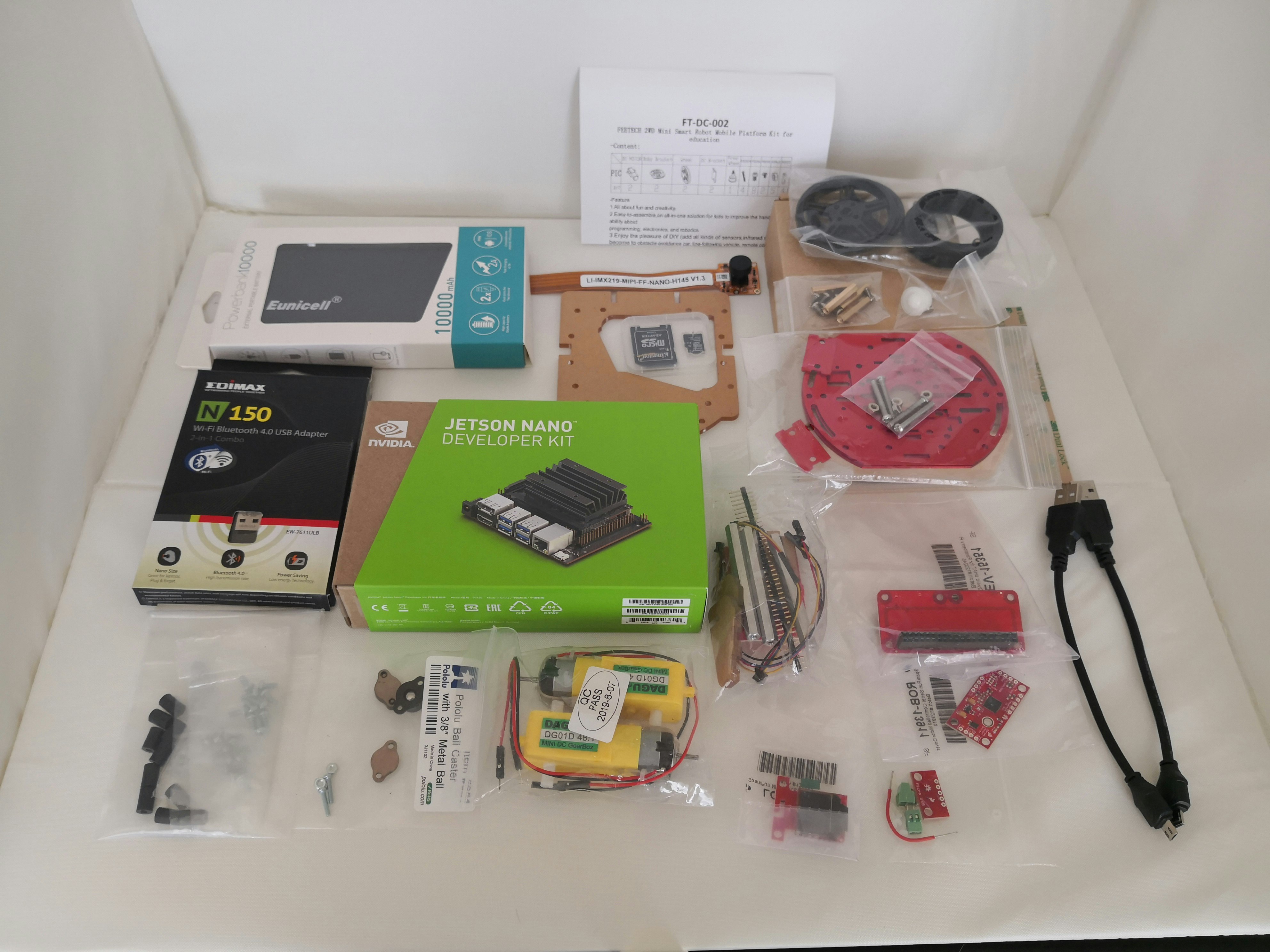
梱包はこんな感じです。





部品を並べてみました。
公式ガイドを見ながら組み立てます。
まずはじめにソフトウェアセットアップまで全て読んで全体像を掴んでおくことをオススメします。
Assembly Guide for SparkFun JetBot AI Kit
Github NVIDIA-AI-IOT/jetbot Hardware Setup
2-2. 2層の円形メインロボティクスシャーシの組み立て
1. Circular Robotics Chassis Kit (Two-Layer) Assembly
注:公式説明の所々にある動画はjetson専用の動画ではなく、sparkfunの標準キットの組み立て方なので、参考程度に見てください。
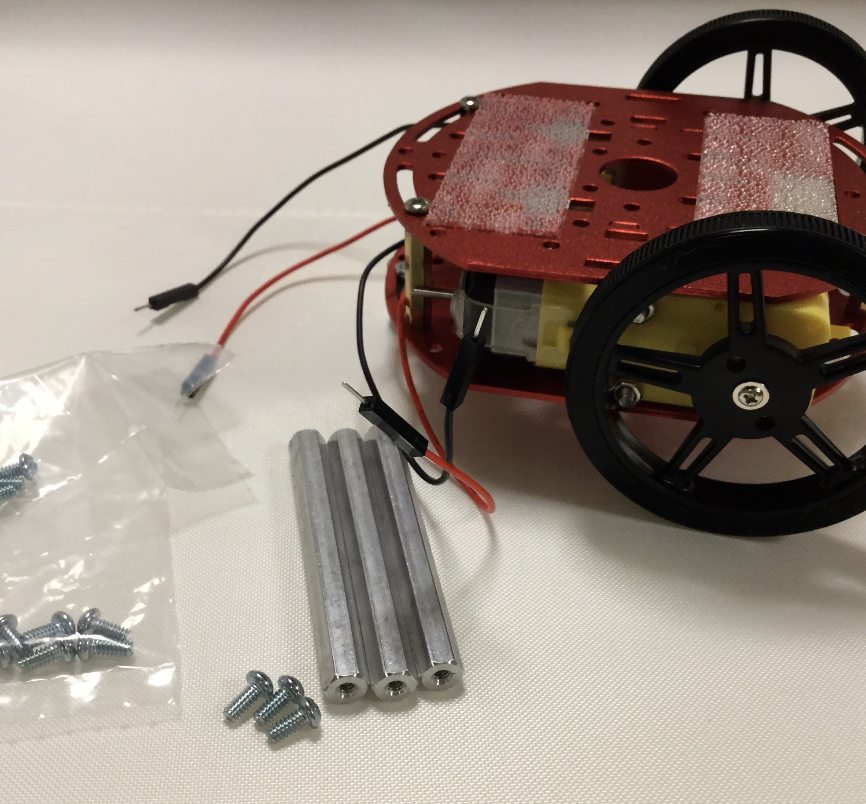
メインシャーシを組み立てていきます。
使う部品はこちらです。


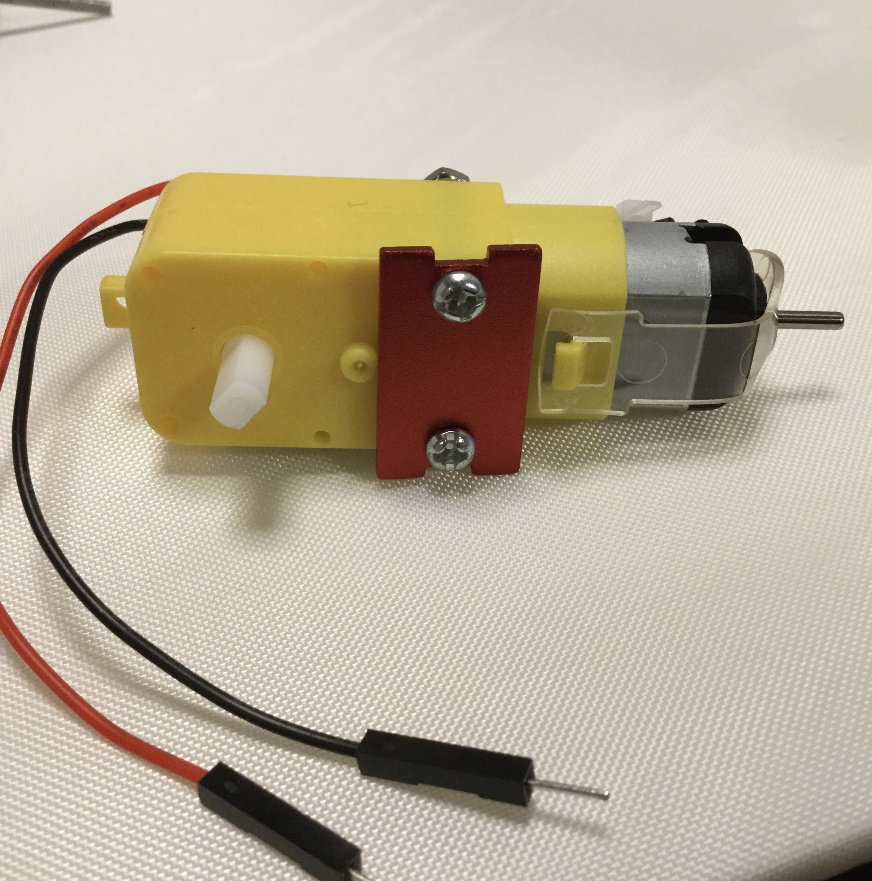
モーターとタイヤ
モーターにシャーシモーターマウントタブを取り付けます。

ホイールにゴムタイヤをつけて、モータに装着します。


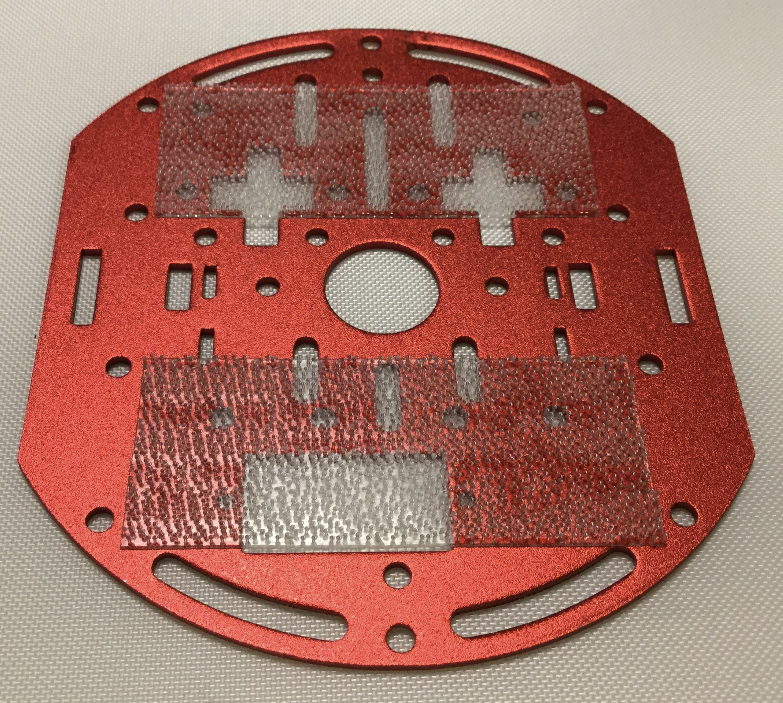
メインシャーシ
まずは、シャーシ1枚目。


キットには二つのボールキャスターが入っているのですが、白い方は、sparkfunの標準キットのものなので、今回は使いません。
黒いキャニスターは3つに分かれていて、ボール部分→細いパーツ→太いパーツの順番です。


もう一枚のシャーシにデュアルロックテープを貼ります。
あとでネジ止めをする部分にかからないのようにこんな感じで貼っておきます。

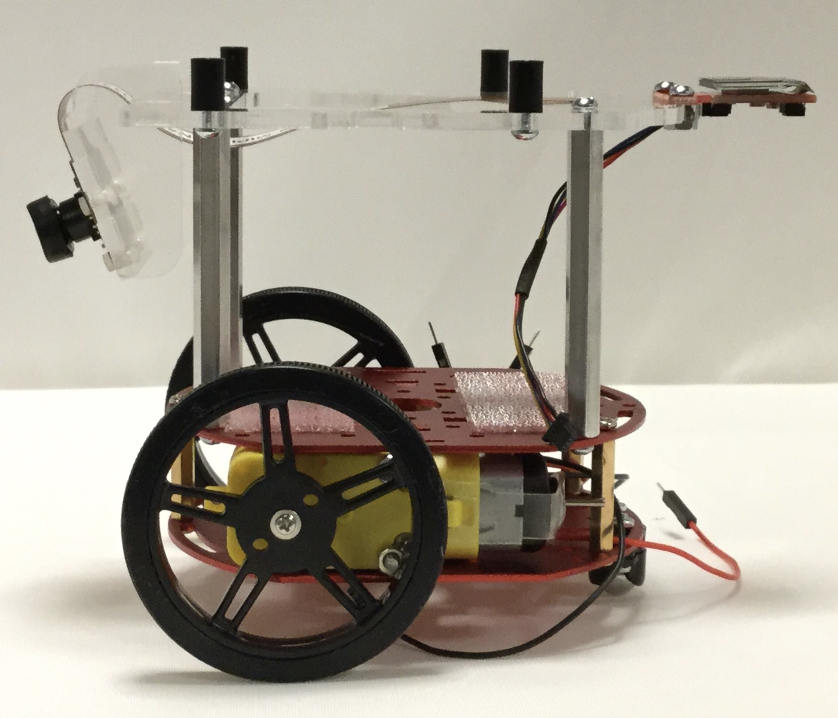
本体
これまで組み立てたパーツを組み合わせていきます。

組み立てたモータをシャーシのくぼみに合うように組み立てます。

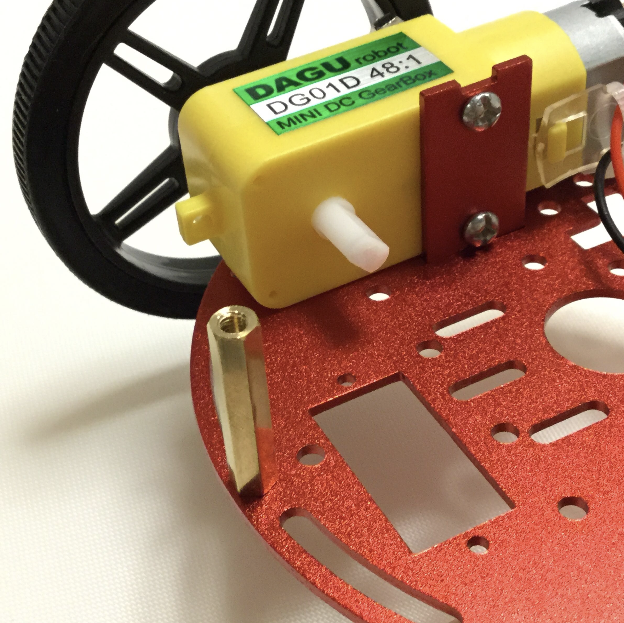


アルミの支柱を3本とりけて、この章での完成です。

2-3. カメラの組み立てと設置
2. Camera Assembly & Installation
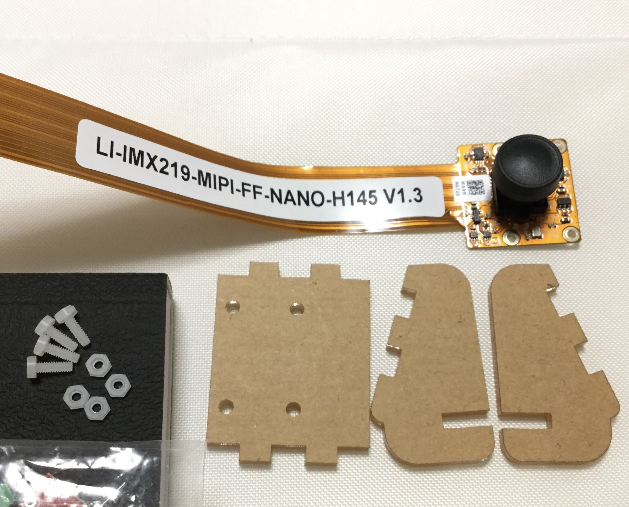
カメラをアクリル製のパーツに取り付けていきます。
使う部品はこちらです。
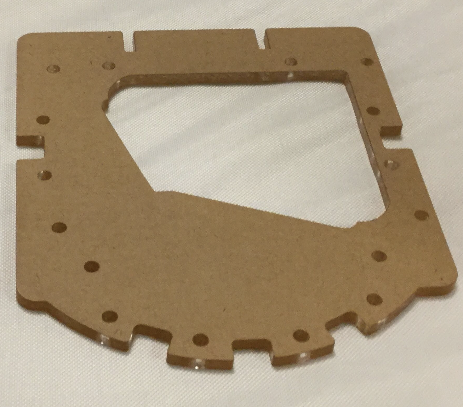
アクリルパーツは保護シールが保護シールが貼られているので、粘着テープなどでくっつけて剥がします。
参考:箱庭技研 アクリル保護シートのはがし方

アクリル板にナイロンの白ネジで四隅を止めてから、両脇にもアクリル板を嵌め込みます。


ナイロン製の黒い支柱を4カ所つけます。

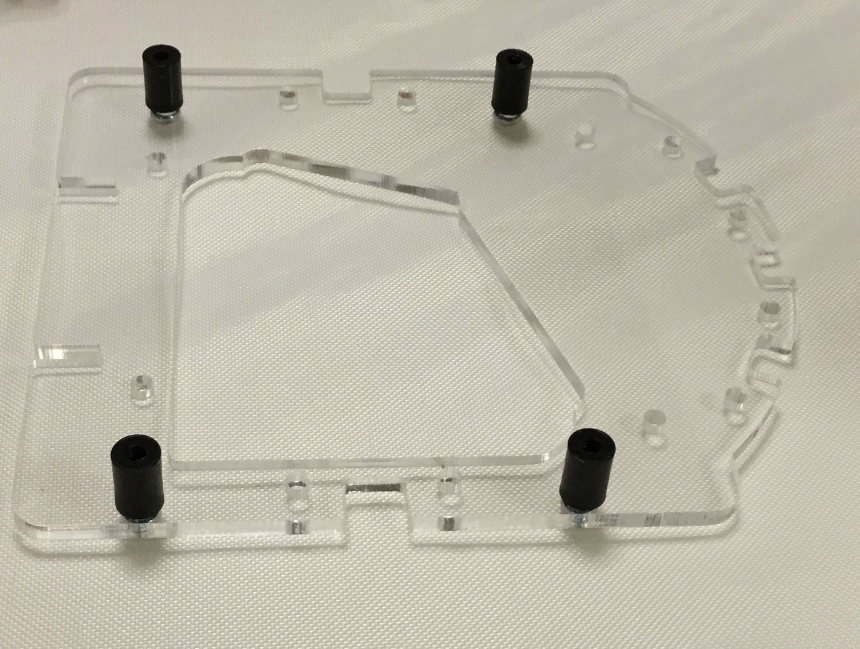
アクリル板のシャーシにカメラパーツを嵌め込みます。


アルミの支柱にネジで取り付けて、この章での組み立ては完成です。

2-4. モータードライバーの組み立て
3. Motor Driver Assembly & Configuration
基盤系を組み立てていきます。
使う部品はこちらです。

はんだ付け
ピンをはんだ付けしていきます。
sparkfunのYoutubeにはハンダ付のレクチャーもあるので実践前に見ておくのもオススメです。
sparkfun はんだ付けの方法
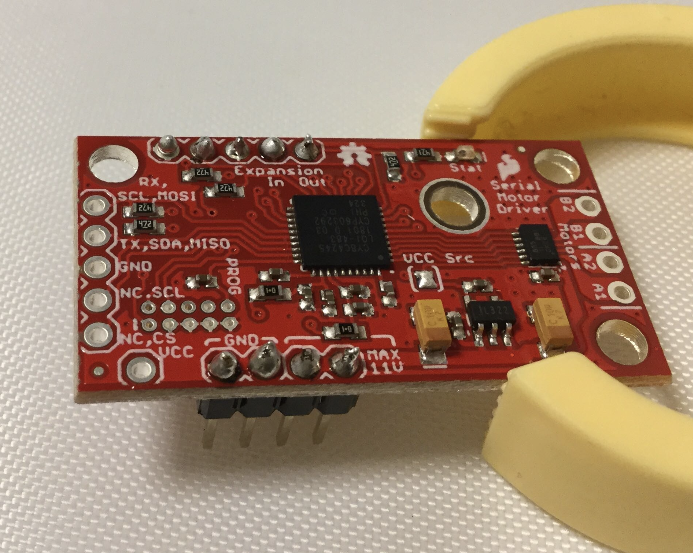
単列 PTH ボードピンヘッダーを4ピンのものを1個、5ピンのものを3個になるようにニッパーで切り離します。

青緑色の2ピンのネジ留め式端子は、モーター接続へ

4ピンのヘッダーは、電源(VIN)接続へ
ひとつ目の5ピンのヘッダーは、拡張ポートへ
ふたつ目の5ピンのヘッダーは、Qwiicケーブルに接続するためにユーザーポートへ
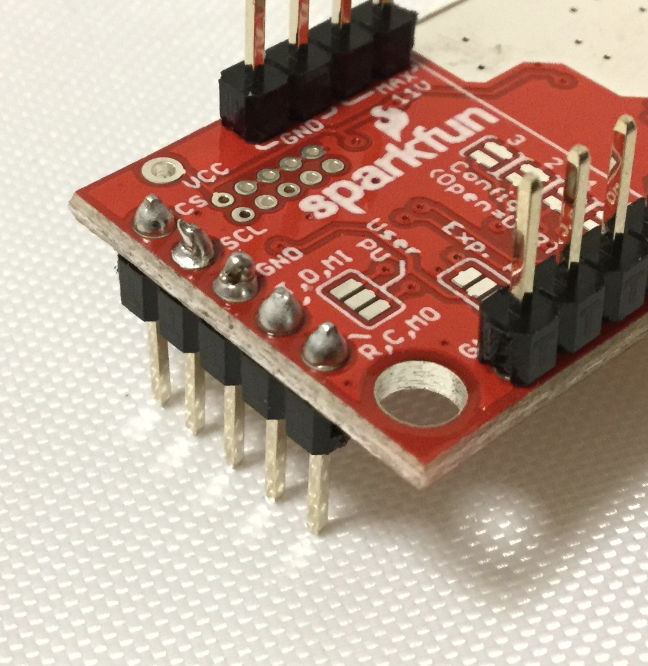
みっつ目の5ピンのヘッダーは、SparkFun microB USBブレイクアウトのブレイクアウトポイントへ

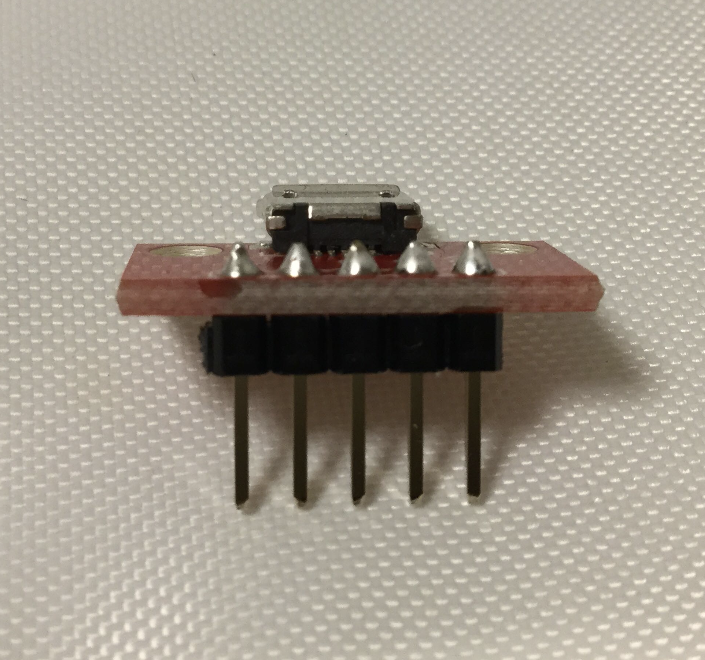
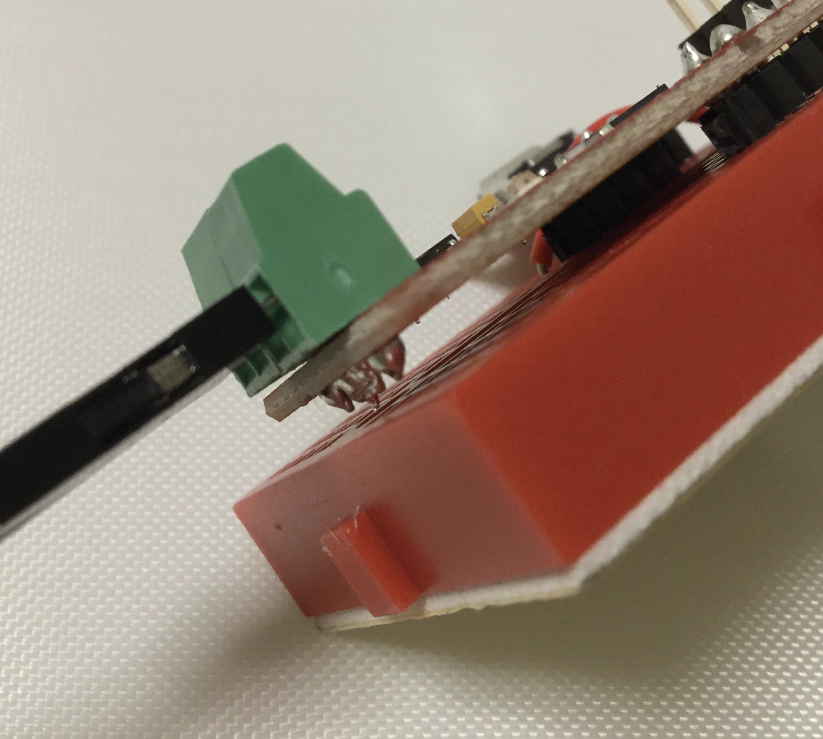
ボード
全てのパーツをミニボードに差し込みます。

青緑色のねじ留めピンにモーターを付けます。
2-5. メインシャーシへの各パーツの取り付け
4. Accessory Installation to Main Chassis
残りのと細かいパーツと Jetson nano を取り付けていきます。
使う部品はこちらです。
OLEDディスプレイ
Qwiicで動作する小型のOLEDディスプレイをつけます。


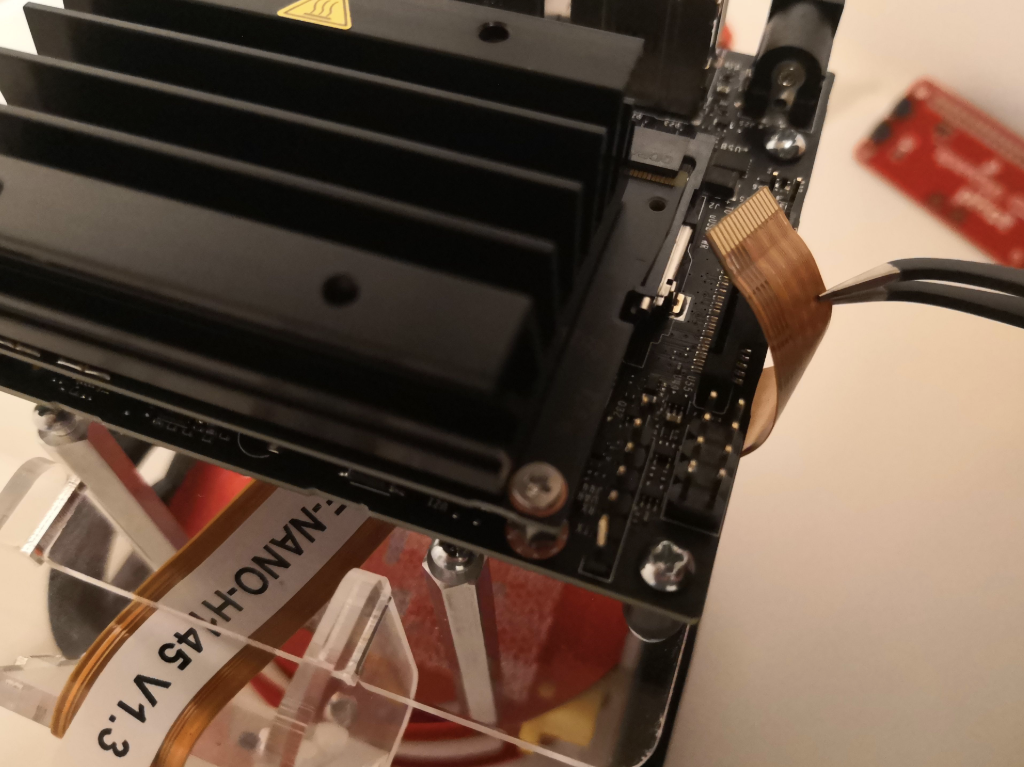
Jetson nano
Jetson nano を本体に取り付けていきます。

カメラをつけます。

シャーシの幅を見て、バッテリー側にもにデュアルロックテープをつけます。

次回
明日は、いよいよ jetson nano を起動してみます。