Neural Networks
1. Concept

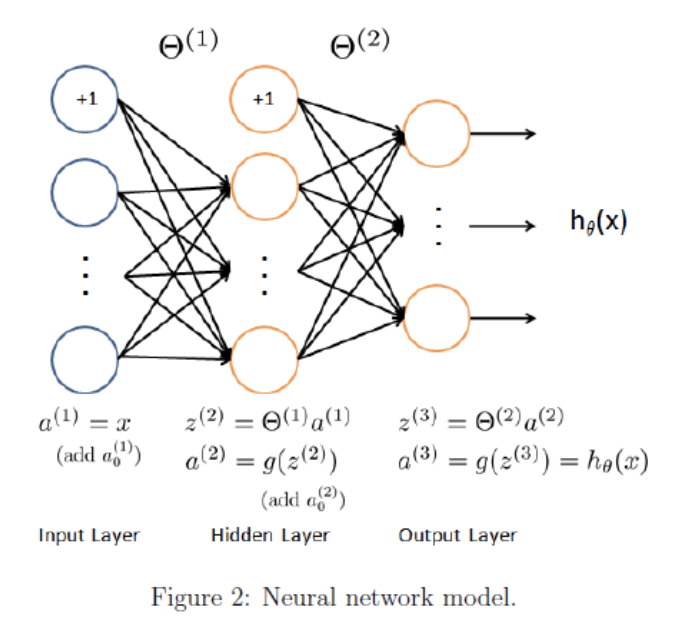
$a_i^{(j)}$ = "activation" of unit $i$ in layer $j$
$Θ^{(j)}$ = matrix of weights controlling function mapping from layer $j$ to layer $j+1$
2. Model Representation
set $x=a^{(1)}$,
$z^{(j)} = Θ^{(j-1)}a^{(j-1)}$
$\searrow$
$a^{(j)} = g(z^{(j)})$
$\swarrow$
$z^{(j+1)}= Θ^{(j)}a^{(j)}$
$\searrow$
$h_Θ(x) = a^{(j+1)} = g(z^{(j+1)})$
3. Application Example

4. Feedforward Propagation Computation Example
5. Cost Function
J(Θ) = - \frac{1}{m} \sum_{i=1}^m \sum_{k=1}^K
\Biggl[y_k^{(i)}log\Bigl( \bigl(h_Θ(x^{(i)})\bigr)_k\Bigr)
+ (1-y_k^{(i)})log\Bigl(1- \bigl(h_Θ(x^{(i)})\bigr)_k\Bigr)\Biggr]
+ \frac{\lambda}{2m} \sum_{l=1}^{L-1} \sum_{i=1}^{S_l} \sum_{j=1}^{S_l+1}
(Θ_{j,i}^{(l)})^2
- $L$ = total number of layers in the network
- $S_l$ = number of units (not counting the bias unit) in layer l
- $K$ = number of output units/classes
- the double sum simply adds up the logistic regression costs calculated for each cell in the output layer
- the triple sum simply adds up the squares of all the individual Θs in the entire network
- the i in the triple sum does NOT refer to training example i
5. Back propagation
For training example t=1 to m:
-
Set $a^{(1)} := x^{(t)}$
-
Perform forward propagation to compute $a^{(l)}$for l=2,3,...,L

-
Using $y^{(t)},compute , \delta^{(L)} = a^{(L)} - y^{(t)} $
-
Compute $\delta^{(L-1)}, \delta^{(L-2)},...,\delta^{2} , using , \delta^{(t)} = \bigl( (Θ^{(l)})^T\delta^{(l+1)}\bigr).*a^{(l)}. *(1-a^{(l)})$
*note: $(a^{(l)}. *(1-a^{(l)}) = g^{'}(z^{(l)}) ,\leftarrow (g-prime)$ -
$ Δ^{(l)} := Δ^{(l)} + a_j^{(l)} \delta_i^{(l+1)}$
or with verctorization: $ Δ^{(l)} := Δ^{(l)} + \delta^{(l+1)} (a^{(l)})^T$
Hence we update our new Δ matrix.
- $D_{i,j}^{(l)} := \frac{1}{m} (Δ_{i,j}^{(l)} + \lambda Θ^{(l)}),, if , j \neq 0. $
- $D_{i,j}^{(l)} := \frac{1}{m} Δ_{i,j}^{(l)},, if , j = 0. $
6. Putting It Together: Training a Neural Network
- Randomly initialize the weights
- Implement forward propagation to get $h_Θ(x^{(i)}) ,for ,any ,x^{(i)}$
- Implement the cost function
- Implement backpropagation to compute partial derivatives
- Use gradient checking to confirm that your backpropagation works. then disable gradient checking
- Use gradient descent or a built-in optimization function to minimize the cost function with the weights in theta
When we perform forward and back propagation, we loop on every training example:
for i = 1:m,
Perform forward propagation and backpropagation using example (x(i),y(i))
(Get activations a(l) and delta terms d(l) for l = 2,...,L