フィードバック制御とは
フィードバック制御とは偏差をゼロにするための手段を考えること。
偏差とは・・制御変数と目標値の差
制御変数とは・・(時間とともに目標値に向かっていく)現時点での動作
『メカトロ二クスTheビギニング』より引用
つまり、フィードバック制御の最大の目的とは
「目標とする動作と現時点での動作の誤差をなくすよう制御すること」
と言って差し支えないでしょう。
その他、簡単にイメージできる例でいくと、
・ライントレーサがラインの情報を取得し、その情報から機体の動きを制御すること
・お風呂のお湯はりをある位置のところで止まるように設定すること
フィードバックに与えられた課題とは
外乱です。
外乱とは・・制御を乱す要因のこと。
例えば車で道路を走行する際、坂道や突風や段差のように
思いがけない条件が外乱に当たります。
このような外乱をいかにクリアするのかが、
フィードバック制御に与えられた課題といえるでしょう。
PID制御とは
フィードバック制御の一種で、温度の制御をはじめ、
モータの回転制御や位置決めをする場合によく用いられる。
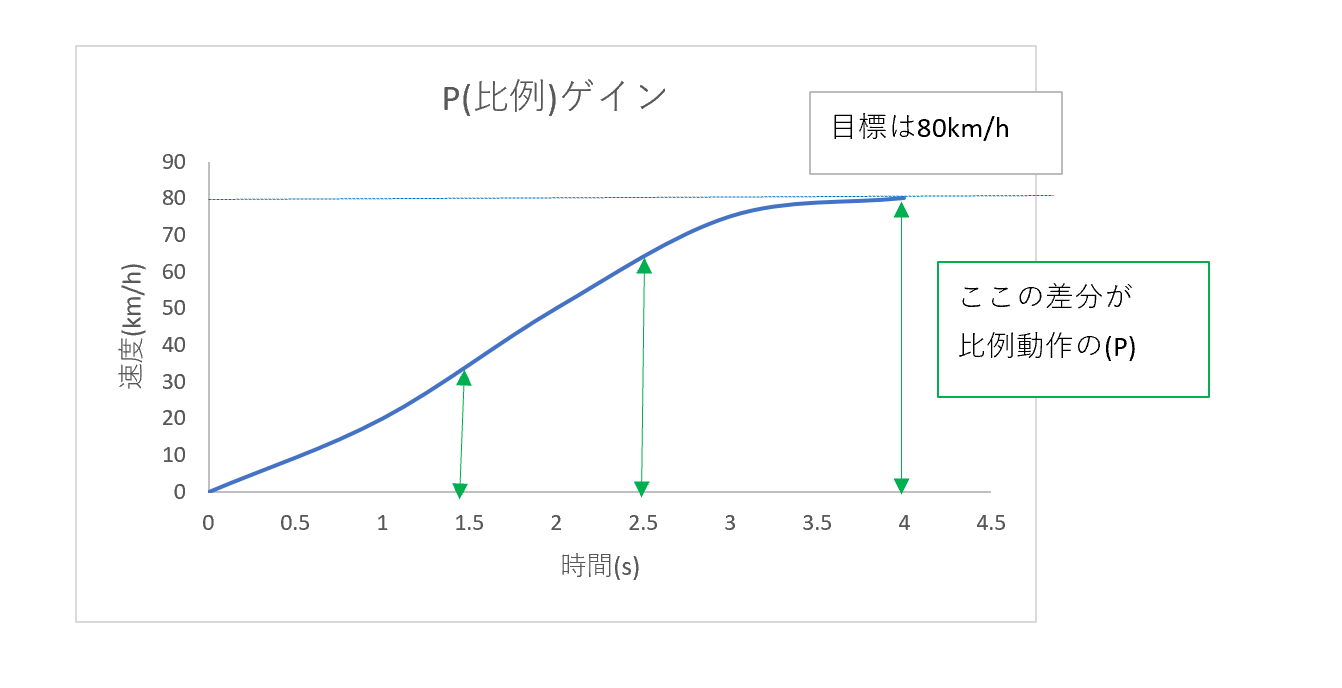
PはProportional:比例動作
→目標値と測定値の差分を計算して比較する要素
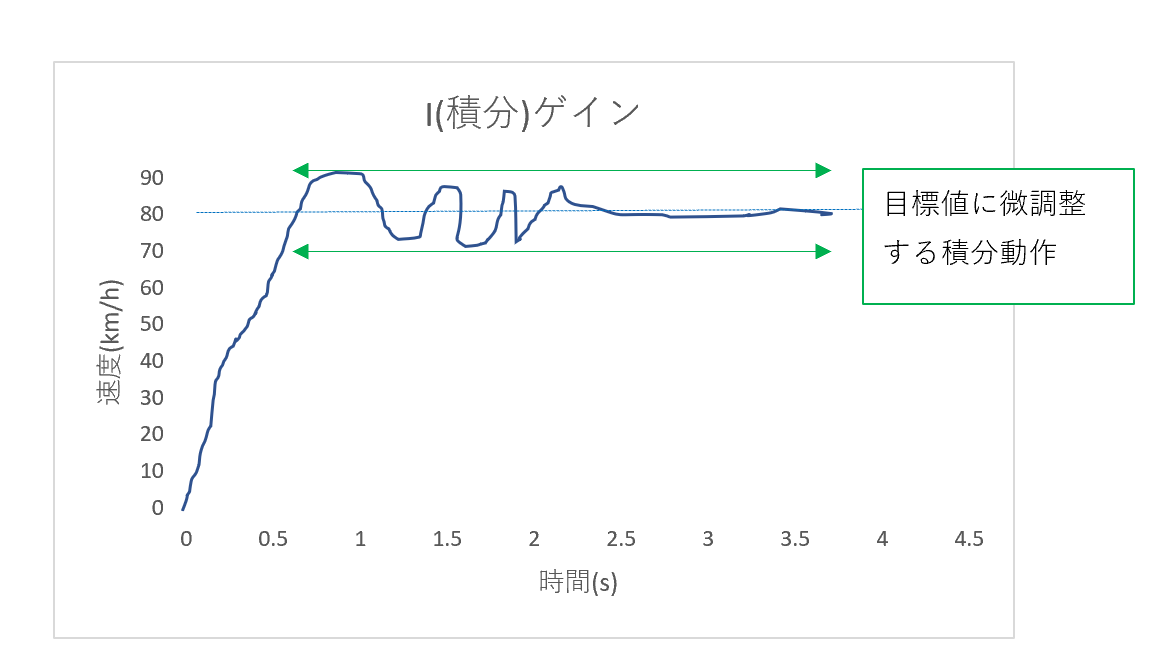
IはIntegral:積分動作
→目標値の面積と設定値の面積を一致するように調整する要素
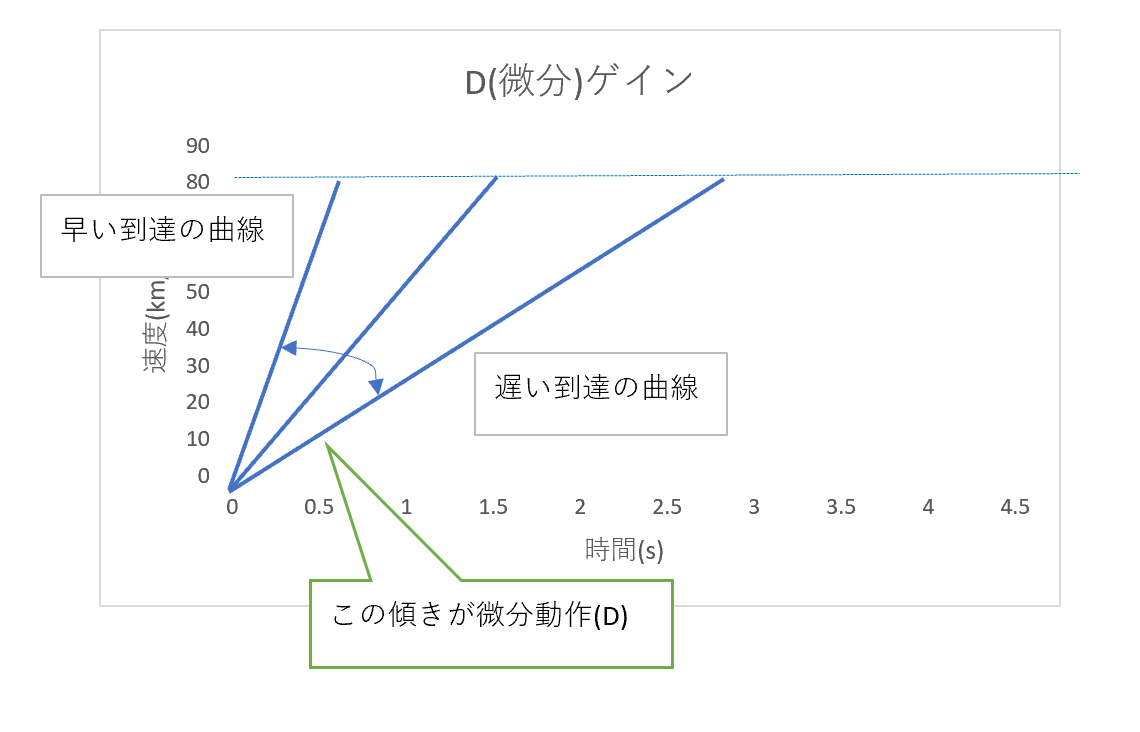
DはDifferential:微分動作
→微分は曲線の接線のこと、この場合は傾きを調整する要素
PID制御に重要なキーワード 「ゲイン」
ゲインとは・・一般的に利得と訳されるが「感度」と解釈するのが良いみたいです。
メカトロニクス製品では個体差が生じるのでそれぞれの製品の状態によって、
感度を強めたり、弱めたりして力を調整することが必要になります。
PID制御の例
高速道路の料金所で一旦停止した後、80km/hまで加速する場合
P(比例)ゲイン
なるべく早く、スムーズに目標の80km/hまで到達するにはどういう手法(曲線)がいいのか、
目標値と現時点での差分で比較検討する。
D(微分)ゲイン
この曲線の傾きが微分要素
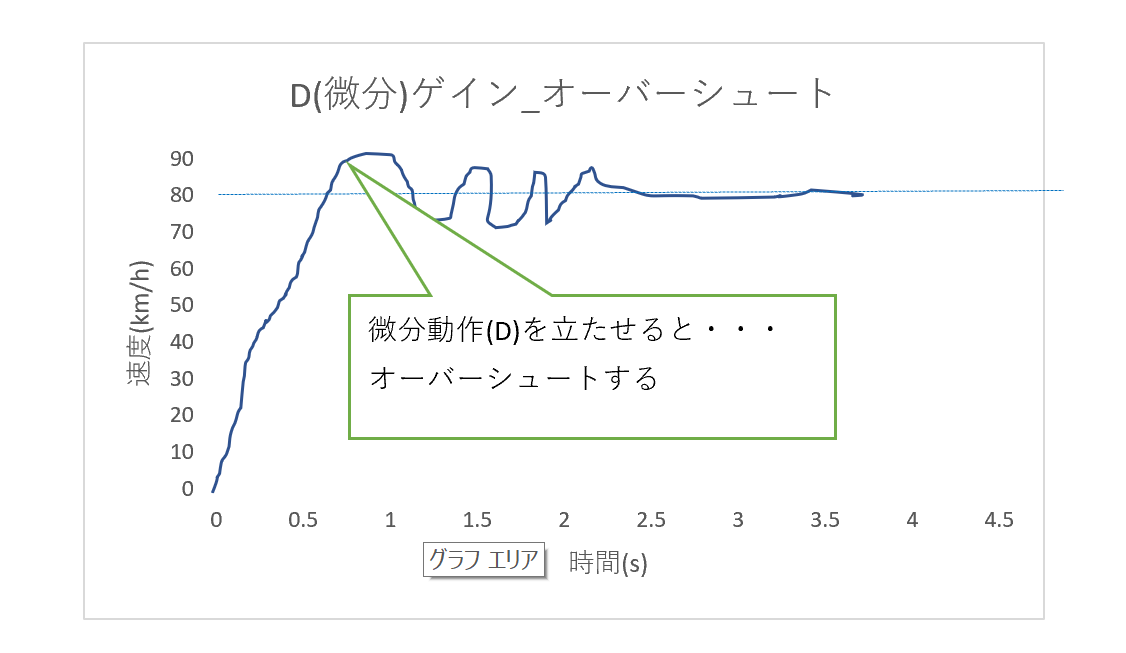
D(微分)ゲイン_オーバーシュート
曲線の傾きを立たせる・・
到達時間が早くなる、オーバーシュートする
(波形が定常値を一旦超過してから引き返すようにして定常値に近づく)
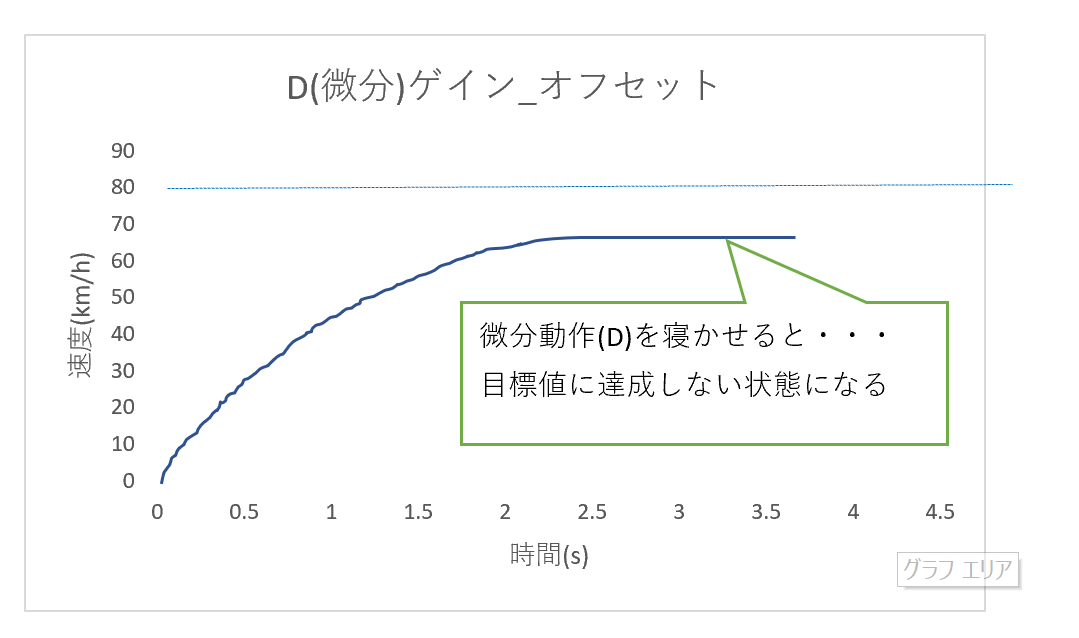
D(微分)ゲイン_オフセット
曲線の傾きを寝かせる・・
到達時間が遅くなる、スムーズな動きになるがパワー不足となる
I(積分)ゲイン
そこで、オフセットした分をできるだけ目標の値に近づけるため、積分ゲインが登場!