UiPathでは、プロジェクトのフォルダ配下に置いてあるファイルが
パッケージ対象となる為、
複数ロボットで外出しにしたロボットを共有することができません。
[イメージ図1]
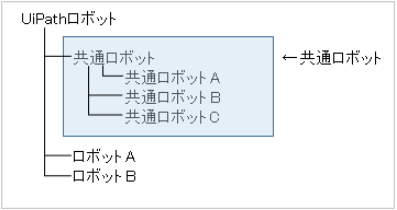
※ロボットA内から共通ロボット配下を参照している場合、
パッケージ化した際にエラーになります。
小規模のロボットの場合、差ほど不便にはなりませんが、
規模が大きければそれだけ共通化したくなる場面が出てきます。
そこで、今回は、
2つの対応方法を紹介したいと思います。
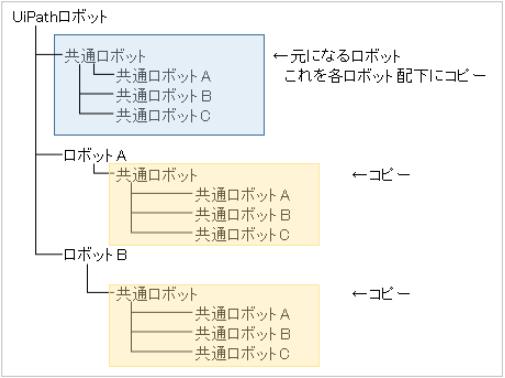
【対応方法1】
元になる共通ロボットを外部に作り、
各フォルダ配下にコピーして使用します。
※この場合、共通ロボットが更新される度に、
各フォルダ配下のファイルを上書きしなければなりません。
更新漏れに注意
[イメージ図2]
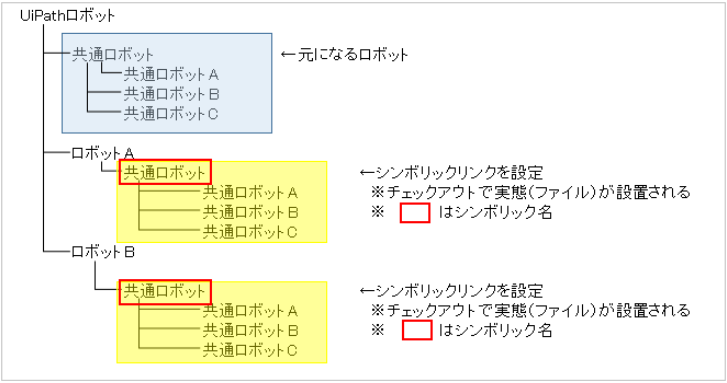
【対応方法2】
各ロボット配下にシンボリックリンクで共通ロボットを設置します。
※SVN使用時のみ可能
SVN上ではシンボリックリンクですが、チェックアウト時には
実態(ロボット)が存在する為、
結果パッケージに含まれる事になります。
※共通ロボットが更新された場合、
SVNでの更新が必要になります。
【対応方法1】と違い、SVNの画面から更新されていないロボットの
確認、更新が容易です。
[イメージ図3]
◆シンボリックリンクの設定方法
1.TortoiseSVNのPropetiesを選択する
2.Propeties画面で「new」ボタンをクリックする
3.「Externals」メニューを選択する
4.「new」ボタンをクリックする
5.下記内容を設定
ローカルパス:(リンクを付けるフォルダ)
例)共通ロボット
URL :(リンク元のパス)
例)^/UiPath/共通ロボット
6.「OK」ボタンをクリックする
7.「OK」ボタンをクリックする
8.TortoiseSVNのSVNUpdataで、ファイルを更新する
シンボリックリンクを設定したフォルダ配下のファイルが配置されます。
いかがでしたでしょうか。
少しでもお役に立てたら光栄です!
まだまだ他にもやり方はあると思いますので、
また、より良い方法を見つけたら、
ご紹介したいと思います。
最後までお付き合いくださり、
ありがとうございました♪