(目次はこちら)
(Tensorflow 2.0版: https://qiita.com/kumonkumon/items/14f7e8f60e942b65f7da)
はじめに
前回の記事では、単純な畳み込みニューラルネットに全結合層を追加して、ちょっとディープニューラルネットっぽくした。次回の記事では、これをまたさらに少し拡張してみようかと。
拡張:プーリング層(pooling layer)の追加
人間って、たとえ文字が回転していても、多少歪んでいても、それを何も意識せずに読むことができるが、それを計算機で実現しようとすると割りと大変。
これまでに書いた内容では、学習によって求められるパラメータ(ウェイト)は特定の位置専用のものとなっていて、データが少し移動してしまうだけで、うまく動かなくなってしまう。MNISTは比較的きれいなデータなので、まぁそこまで識別率が下がるわけではないけど。
で、この位置の変化についてロバストにしてくれる層が、プーリング層。この呼び方の由来は、一旦、特徴なりをプール(pool)しておいて、そこから代表的なものを選択or算出するので、プーリング(pooling)と呼ばれている。
このプーリング層で何をやるのかというと、データのサンプリング。以上。
画像データの場合だと、画像を縮小するという作業。なので、非常にシンプルな処理。
追加するとこんな感じ。
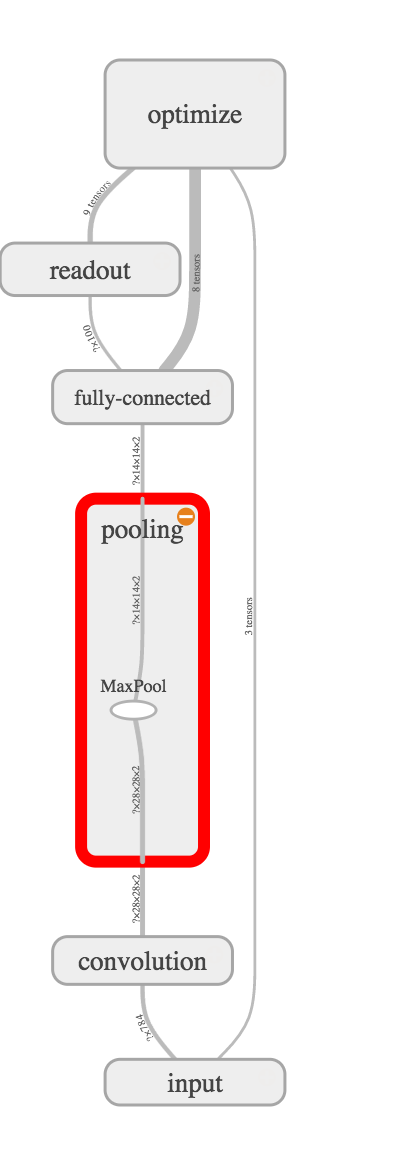
次元が、28 x 28 x 2から14 x 14 x 2に変わっているのがわかる。実際の処理は、MaxPoolってやつで、2 x 2の領域から、値が最大のものを代表値としてサンプリングしている。なので、情報量というか次元が1/4になっている。最大値の他にも、平均にしたり、ちょっと複雑にしてみたりといろいろある。
なぜ、こんな処理でうまくいくのかというと、画像は小さいほうが移動が目立たないからという単純な理由。
プーリングは単純だけど、これだけで論文になるほど奥が深い。
http://cs.nyu.edu/~ylan/files/publi/boureau-icml-10.pdf
Y-Lan Boureau, Jean Ponce, and Yann LeCun,
A theoretical analysis of feature pooling in vision algorithms,
Proc. International Conference on Machine learning (ICML'10), 2010
コード
Python: 3.6.8, Tensorflow: 1.13.1で動作確認済み
(もともと2016年前半に書いたものなので、順次更新しています。)
from helper import *
IMAGE_WIDTH, IMAGE_HEIGHT = 28, 28
CATEGORY_NUM = 10
LEARNING_RATE = 0.1
FILTER_NUM = 2
FEATURE_DIM = 100
TRAINING_LOOP = 20000
BATCH_SIZE = 100
SUMMARY_DIR = 'log_fixed_cnn_fc'
SUMMARY_INTERVAL = 1000
BUFFER_SIZE = 1000
EPS = 1e-10
with tf.Graph().as_default():
(X_train, y_train), (X_test, y_test) = mnist_samples()
ds = tf.data.Dataset.from_tensor_slices((X_train, y_train))
ds = ds.shuffle(BUFFER_SIZE).batch(BATCH_SIZE).repeat(int(TRAINING_LOOP * BATCH_SIZE / X_train.shape[0]) + 1)
next_batch = ds.make_one_shot_iterator().get_next()
with tf.name_scope('input'):
y_ = tf.placeholder(tf.float32, [None, CATEGORY_NUM], name='labels')
x = tf.placeholder(tf.float32, [None, IMAGE_HEIGHT, IMAGE_WIDTH], name='input_images')
with tf.name_scope('convolution'):
W_conv = prewitt_filter()
x_image = tf.reshape(x, [-1, IMAGE_HEIGHT, IMAGE_WIDTH, 1])
h_conv = tf.abs(tf.nn.conv2d(x_image, W_conv, strides=[1, 1, 1, 1], padding='SAME'))
with tf.name_scope('pooling'):
h_pool = tf.nn.max_pool(h_conv, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
with tf.name_scope('fully-connected'):
W_fc = weight_variable([int(IMAGE_HEIGHT / 2 * IMAGE_WIDTH / 2 * FILTER_NUM), FEATURE_DIM], name='weight_fc')
b_fc = bias_variable([FEATURE_DIM], name='bias_fc')
h_pool_flat = tf.reshape(h_pool, [-1, int(IMAGE_HEIGHT / 2 * IMAGE_WIDTH / 2 * FILTER_NUM)])
h_fc = tf.nn.relu(tf.matmul(h_pool_flat, W_fc) + b_fc)
with tf.name_scope('readout'):
W = weight_variable([FEATURE_DIM, CATEGORY_NUM], name='weight')
b = bias_variable([CATEGORY_NUM], name='bias')
y = tf.nn.softmax(tf.matmul(h_fc, W) + b)
with tf.name_scope('optimize'):
y = tf.clip_by_value(y, EPS, 1.0)
cross_entropy = tf.reduce_mean(-tf.reduce_sum(y_ * tf.log(y), axis=1))
train_step = tf.train.GradientDescentOptimizer(LEARNING_RATE).minimize(cross_entropy)
cross_entropy_summary = tf.summary.scalar('cross entropy', cross_entropy)
with tf.Session() as sess:
train_writer = tf.summary.FileWriter(SUMMARY_DIR + '/train', sess.graph)
test_writer = tf.summary.FileWriter(SUMMARY_DIR + '/test')
correct_prediction = tf.equal(tf.argmax(y, 1), tf.argmax(y_, 1))
accuracy = tf.reduce_mean(tf.cast(correct_prediction, tf.float32))
accuracy_summary = tf.summary.scalar('accuracy', accuracy)
sess.run(tf.global_variables_initializer())
for i in range(TRAINING_LOOP + 1):
images, labels = sess.run(next_batch)
sess.run(train_step, {x: images, y_: labels})
if i % SUMMARY_INTERVAL == 0:
train_acc, summary = sess.run(
[accuracy, tf.summary.merge([cross_entropy_summary, accuracy_summary])],
{x: images, y_: labels})
train_writer.add_summary(summary, i)
test_acc, summary = sess.run(
[accuracy, tf.summary.merge([cross_entropy_summary, accuracy_summary])],
{x: X_test, y_: y_test})
test_writer.add_summary(summary, i)
print(f'step: {i}, train-acc: {train_acc}, test-acc: {test_acc}')
コードの説明
変更が入った部分を。
プーリング層
追加された層。
with tf.name_scope('pooling'):
h_pool = tf.nn.max_pool(h_conv, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
全結合層
プーリング層の出力を入力にする変更。それに伴って入力の次元が変わっているのでその変更。
with tf.name_scope('fully-connected'):
W_fc = weight_variable([int(IMAGE_HEIGHT / 2 * IMAGE_WIDTH / 2 * FILTER_NUM), FEATURE_DIM], name='weight_fc')
b_fc = bias_variable([FEATURE_DIM], name='bias_fc')
h_pool_flat = tf.reshape(h_pool, [-1, int(IMAGE_HEIGHT / 2 * IMAGE_WIDTH / 2 * FILTER_NUM)])
h_fc = tf.nn.relu(tf.matmul(h_pool_flat, W_fc) + b_fc)
となって、変更量は非常に少ない。
結果
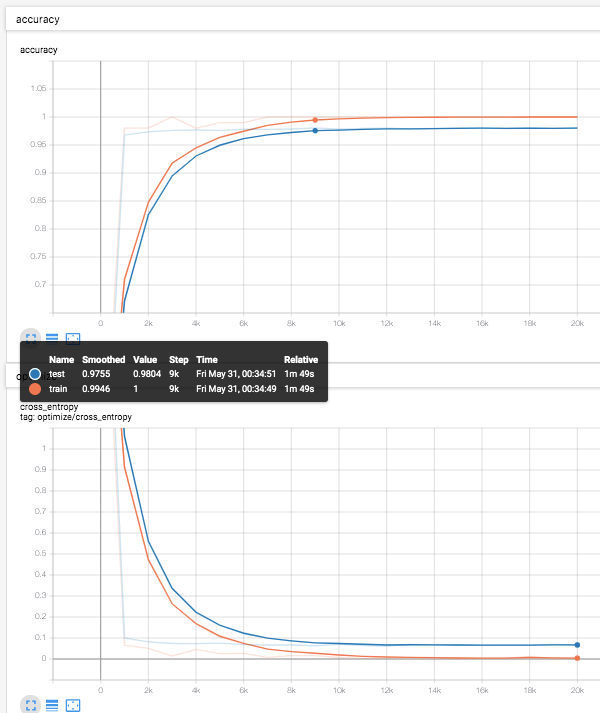
テストデータ(青線)での識別率は、98.0%程度。
ようやく、多層パーセプトロンでの結果(97.8%)を超えてきた。
この辺りが、固定フィルタ(しかもPrewitt)の限界だろうか。
あとがき
今回は、前回の記事で紹介したフィルタを固定した畳み込みニューラルネットワークに、プーリング層を追加してみました。次回の記事では、これをさらに拡張してみます。